一种升鱼斗导向稳定结构的制作方法
[0001]
本实用新型涉及水利水电工程的水生生态保护领域,具体涉及一种升鱼斗导向稳定结构。
背景技术:
[0002]
水利水电工程建设过程中,为加强河道水生生态的保护,对于具有过鱼需求的工程,会修建过鱼设施,对于不具备修建鱼道、仿自然通道等连续过鱼设施的工程,根据实际情况会提出集运鱼系统等综合过鱼方式,其中,升鱼斗是集运鱼系统中的重要实施设备,集运鱼系统的工作过程是,先用升鱼斗收集鱼类,并通过牵引设备拉动升鱼斗提升至一定高度,再将升鱼斗内的鱼类转至运鱼箱或鱼类分选设施中。
[0003]
升鱼斗升降及平移的操作过程中会不可避免地进行晃动,升鱼斗经过集鱼通道,集鱼通道内水流对升鱼斗产生一定的水平推力,使升鱼斗产生顺水漂移和晃动,升鱼斗在运行过程中的漂移和晃动不仅影响升鱼效率,严重时甚至导致其无法正常落回集鱼池或在集鱼池内因倾斜而被卡主,无法完成升鱼操作;因此,如何使升鱼斗在升降过程中保持稳定,避免与集鱼通道侧壁或集鱼池侧壁发生碰撞,有效提高升鱼操作效率,成为亟待解决的难题。
技术实现要素:
[0004]
本实用新型的目的在于,提供一种升鱼斗导向稳定结构,本实用新型可以使升鱼斗在升降过程中保持稳定,避免与集鱼通道侧壁或集鱼池侧壁发生碰撞,有效提高升鱼操作效率。
[0005]
为此,本实用新型采用以下技术方案:
[0006]
一种升鱼斗导向稳定结构,包括集鱼通道和集鱼通道下方的集鱼池,其特征在于:集鱼通道内设有升鱼斗,集鱼通道的内壁上对称开设有升降导轮槽,升降导轮槽延伸至集鱼池下方,升鱼斗的两侧经导轮组件与升降导轮槽滑动连接。
[0007]
进一步地:所述升降导轨的顶部设有导向口。
[0008]
进一步地:所述导轮组件包括固定在升鱼斗侧面的轮轴,轮轴的另一端固定轴承,轴承与升降导轮槽相配合。
[0009]
进一步地:所述导轮组件设置在升鱼斗侧壁的中线位置,且每一侧壁至少设置两组导轮组件。
[0010]
进一步地:所述升降导轮槽的底部与集鱼池的底部之间具有一定距离。
[0011]
与现有技术相比,本实用新型具有以下有益效果:
[0012]
本实用新型升鱼斗两侧设置导轮组件,集鱼通道和集鱼池上开设升降导轮槽,利用导轮组件和升降导轮槽相互配合,对轴承起到限位的作用,可防止升鱼斗在升降的过程中,产生偏移,发生倾斜而被卡主,实现升鱼斗平稳、快速地进行升降,避免与集鱼通道侧壁或集鱼池侧壁发生碰撞,提高升鱼效率,满足升鱼操作的需求。
附图说明
[0013]
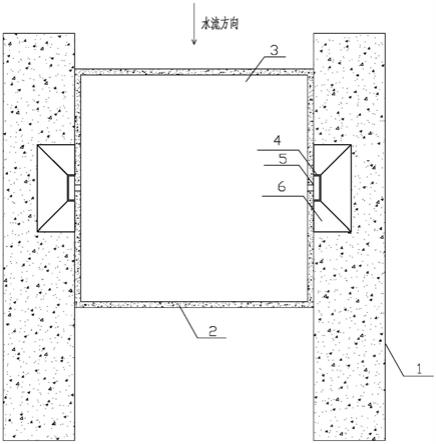
图1是升鱼斗和集鱼池的俯视图;
[0014]
图2是升鱼斗和集鱼池的左视图;
[0015]
图3是升鱼斗和升鱼斗导轮组件的横向剖视图;
[0016]
图4是升降导轮槽的结构示意图;
[0017]
图5是升降导轮槽的局部示意图。
[0018]
附图中的标记为:1-集鱼通道;2-集鱼池;3-升鱼斗;4-升降导轮槽;5-导轮组件;6-导向口;7-轮轴;8-轴承。
具体实施方式
[0019]
下面结合附图和实施例对本实用新型作进一步的说明,但并不作为对本实用新型限制的依据。
[0020]
如图1-图5所示,本实用新型提供的一种升鱼斗导向稳定结构,包括集鱼通道1和集鱼通道1下方的集鱼池2,集鱼通道1呈矩形断面的渠状结构,上部敞开,集鱼池2位于集鱼通道1末端,在集鱼通道1末端呈下凹的方形结构,内部用于容纳升鱼斗3,其尺寸略大于升鱼斗3,集鱼通道1内设有升鱼斗3,升鱼斗3为方形或圆形结构,底部收窄形成漏斗形,配合起吊装置可在集鱼池2和集鱼通道1内上下移动,升鱼斗3内部重量保持均衡,集鱼通道1的内壁上对称开设有升降导轮槽4,升降导轮槽4延伸至集鱼池2下方,升鱼斗3的两侧经导轮组件5与升降导轮槽4滑动连接,升降导轮槽4对轴承8起到限位的作用,可防止升鱼斗3在活动过程中,产生偏移,发生倾斜而被卡主,在集鱼通道1、集鱼池2的建造过程中预埋或安装升降导轮槽4。
[0021]
所述升降导轮槽4的顶部设有导向口6,导向口6底部收窄呈三面下凹的漏斗状,底部与升降导轮槽4的顶部连通,用于引导导轮组件5滑入升降导轮槽4,导向口6和升降导轮槽4均采用钢等金属材质,并经过防锈处理,与轴承8接触面光洁,无明显凸起或接缝。
[0022]
所述导轮组件5包括固定在升鱼斗3侧面的轮轴7,轮轴7为圆柱形,轮轴7与升鱼斗3焊接固定,轮轴7的另一端固定轴承8,轴承8为圆环形,轴承8中空部位与轮轴7固定连接,轴承8与升降导轮槽4相配合。
[0023]
所述导轮组件5设置在升鱼斗3侧壁的中线位置,且每一侧壁至少设置两组导轮组件5,为减小升鱼斗3落回和提起过程中纵向晃动。
[0024]
所述升降导轮槽4的底部与集鱼池2的底部之间具有一定距离,便于集鱼池2底的清理。
[0025]
工作原理:升鱼斗3在落回集鱼池2时,随着升鱼斗3的逐渐下落,升鱼斗3总体下落方向不宜有过大幅度的偏移,当升鱼斗3两侧的轴承8接触升降导轮槽4时,由于向内收窄的导向口6对轴承8具有约束和导向的作用,升鱼斗3两侧最下边的轴承8逐渐向升降导轮槽4处移动,待升鱼斗3两侧最下边的轴承8进入升降导轮槽4后,继续使升鱼斗3下降,升鱼斗3两侧上边的轴承8也逐渐进入升降导轮槽4,最后升鱼斗3在升降导轮槽4的引导下,顺利进入集鱼池2,升鱼斗3落回过程中,集鱼通道1可持续稳定补水。
[0026]
在升鱼斗3提升时,逐步拉升升鱼斗3,升鱼斗3在升降导轮槽4的引导下逐渐上升,升鱼斗3两侧的轴承8由上至下依次离开升降导轮槽4,并继续上升至最终提升高度,升鱼斗
3提升过程中,集鱼通道1可持续稳定补水,升鱼斗3卸鱼后,提升操作结束,并进入下一个升鱼斗3落回过程。
[0027]
以上实施例仅为本实用新型的一种较优技术方案,本领域的技术人员应当理解,在不脱离本实用新型的原理和本质情况下可以对实施例中的技术方案或参数进行修改或者替换,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1