多功能保洁清淤船的制作方法
1.本实用新型涉及水环境工程领域,尤其涉及河湖水面保洁及清除水底富营养化淤泥的技术应用领域。
技术背景
2.随着黑臭水体治理的进展,治水人基本都有两个非常头疼而又无法解决的问题,即水面漂浮的油污和蓝藻,每当雨后水面上总是飘着一层油污,在阳光的照耀下,异彩纷呈,由于油污颗粒细腻,通过人工清除,即使使用吸油棉,也很难去除,吸油棉的效率太过底下;每年高温季节,治水人的重中之重是防止蓝藻爆发,蓝藻爆发可是一发不可收拾,蓝藻的根治必须依靠生态平衡的措施,可通过生态平衡调整水质是一个漫长的过程,在这治水的过程中,治水人一般都是通过药物防治蓝藻,可是药三分毒,可以说所有的药物都会造成二次污染,只是程度不同而已,况且有效的调水药物价格也很可观,因此在蓝藻爆发初期,治水人都希望有一个能够快速削减蓝藻的措施,为调水控藻争取时间。
3.另外,目前河湖清淤已经从过去的仅以提高河湖防洪、排涝和灌溉能力的传统水利工程目标向生态水利目标拓展,也就是说在很多河湖清淤工程的目标中都含有减少河湖内源污染,为河湖水质改善提供保障的工程目的。而河湖内源污染的解决方案当前只有原位处理和异位处理两种方式,原位处理又包括原位覆盖和微生物分解两种方式,其中原位覆盖会影响河湖防洪、排涝和灌溉能力,微生物分解处理速度太慢,效果也不明显;异位处理是通过人工或机械的手段将河湖底泥转移到其他地方,减少河湖内源污染,这种处理方式虽然成本较高,转移的淤泥也未得到有效的处理,但其相对于河湖来说,削减内源污染效果明显,因此作为异位处理的清淤削减内源污染成为了首选方案。河湖内源污染的异位处理包括排水清淤和不排水清淤两种方式,其中排水清淤存在影响周边景观,二次污染,破坏原有水体生态,有些水体不便排水等诸多不利因素;不排水清淤虽然在削减内源污染上不及排水清淤,但因其不利因素较小,却成为当下主要的削减河湖内源污染的手段。目前环保清淤工程较为普遍,通常采用清淤船吸泥,由输送管道送往堆场堆放的模式,清淤产生的泥浆先进入堆场存放,在沉淀以后进行土地还原或者进行处理利用。这种所谓的环保清淤有以下几个弊端:一是在施工现场附近必须有供泥浆存放沉淀的淤泥堆场;二是清淤船吸上来的淤泥需要进行远距离运输到淤泥堆场,能耗过大;三是清淤施工时,必需占用绿地或道路等场所作为施工现场,对绿地造成破坏,给行人带来诸多不便;四是清淤时只能根据预估的淤泥厚度,盲目地对底泥进行扰动使其形成泥浆后,通过污泥泵排往淤泥堆场,这种方式在清淤时不仅因扰动底泥而污染水体,二次污染严重,并且在底泥扰动量上也没有办法控制,过清或漏清是很难避免的。而对于中小河道以及农村河湖的清淤工程到底应该如何实施,使用什么样的清淤机械和工艺,清出来的淤泥应该如何处理,在目前尚无一个比较规范或者公认的方法。
技术实现要素:
4.本实用新型要解决的技术问题有:一是快速清理河湖水面油污及水面漂浮垃圾等;二是在蓝藻爆发初期,快速削减水面蓝藻数量,为调水控藻争取时间;三是针对目前的环保清淤模式需要淤泥堆场、二次污染严重、清淤不彻底等种种弊端,提出一种常态化生态清淤的清淤模式,提供一种无需淤泥堆场、无需远距离泥浆输送、无需占用绿地或道路作为施工场地、可视化可遥控的水底淤泥清除装置,最大程度地消减了底泥对水质的污染。
5.1、本实用新型的技术方案是:多功能保洁清淤船,它主要由画舫船、自吸系统、油水分离及泥浆预处理系统、泥水分离系统、泥饼装袋系统、智能控制系统和其他辅助设施组成;所述的画舫船是采用画舫形式的景观船,为清淤保洁设备提供一个水上承载平台;所述的自吸系统包括吸头、吸头移动机构、自吸泵、吸排管道,位于画舫船的前端,所述的吸头有泥浆吸头或油污及蓝藻吸头;所述的泥浆吸头由泥浆搅拌机、防护罩、吸泥管道接口、水下摄像头组成,所述的泥浆搅拌机是能够扰动底泥使泥浆相对均匀的水下搅拌机,所述的防护罩是一个能够防止扰动底泥时泥浆四处扩散造成二次污染的呈碗状刚体,所述的吸泥管道接口一端通过吸泥管道与自吸系统入口连接,另一端为能够拦截较大异物又不影响自吸泵工作的镂空圆柱壳体,所述的水下摄像头是固定在防护罩前方的具有防水功能的红外线摄像头;所述的油污及蓝藻吸头由吸头壳体、吸排管道接口、挡板及安装端口组成,所述的吸头壳体是长条形截面呈矩形或圆形薄壁构件,其上方均匀分布着吸孔,工作时吸孔位于水面以下约2cm至3cm处,其下方中间位置有一排水口与吸排管道接口连通,所述的挡板是具有一定强度的板状刚体,确保能够挡住水草避免水草堵住吸孔,同时要能够防止油污或蓝藻从后方或两侧溢出;所述的吸头移动机构由水平导轨、水平丝杠、水平移动步进电机、移动平台、垂直移动步进电机、垂直移动丝杠和防转设施组成,所述的垂直移动丝杠下端适配有防止吸头意外脱落的凸台,所述的防转设施包括吸头连接器、连接销、轴承、防转杆;所述的自吸泵是具有一定的吸程,确保能够快速抽吸泥浆或蓝藻等物体的泵;所述的吸排管道包括抽吸管道和排污管道,所述的抽吸管道一端与自吸泵入口连接,一端与泥浆吸头或油污及蓝藻吸头连接,所述的排污管道一端与自吸泵出口连接,另一端与油水分离及泥浆预处理系统的进水口连接。
6.所述的油水分离及泥浆预处理系统是油水分离箱体、隔油板、格栅、进水口、溢流口、泥浆出口、油污出口吸油泵和石块垃圾出口电子阀构成。
7.所述的泥水分离系统由设备主体、絮凝混合池、自动加药装置、泥浆脱水设施组成。
8.所述的油水分离及泥浆预处理系统的溢流口适配有可启闭的手动阀门及电子阀门,所述的泥浆出口处适配有加压泵,通过加压泵与泥水分离系统的絮凝混合池连接,所述的泥浆脱水设施是能够连续工作的泥浆脱水设备,所述的自动加药装置是能够自动添加药剂,加水搅拌均匀,按设定的计量将药剂加入加药搅拌池的设备。
9.所述的泥饼装袋系统是将经过泥水分离出来的泥饼进行粉碎装袋的设施,位于泥水分离系统出泥端,泥饼装袋系统是人工泥饼装袋系统或自动泥饼装袋系统,所述人工泥饼装袋系统主要包括泥饼收集桶和泥饼袋子,所述自动泥饼装袋系统包括机械手、泥饼袋子和切换挡板。
10.所述的智能控制系统主要包括测控探头、智能控制存储器及无线收发模块四个部
分,所述的测控探头包括水下摄像头、水面摄像头和超声波探测仪,所述的水下摄像头固定在泥浆吸头的防护罩上,是带有红外线夜景拍摄功能的摄像头,并在摄像头前方适配有照明组件,所述的照明组件是由几组高亮冷光源的led灯组成;所述的水面摄像头位于画舫船的前方,水面摄像头视角的调整应当确保能够观察到画舫船前进方向水面油污、悬浮垃圾及障碍物;所述的超声波探测仪是能够测量淤泥深度的仪器,位于泥浆吸头前方画舫船前檐下;所述的智能控制存储器是由数据处理器、控制模块、存储模块、显示器、输入输出接口以及手动控制、自动控制和远程控制切换开关等组成,可通过手动控制进行现场操作,也可通过数据电缆线与获取工况基本信息的摄像头、超声波探测仪连接,将获取的视频信息实时送往显示器和无线收发模块,在显示器或手机上实时观察现场工作状况,记录水下清淤的全过程,同时可根据工况信息发出相应的驱动信号,驱动螺旋桨控制画舫船的移动,驱动吸头的移动,控制自吸泵、油水分离设备及泥水分离设备之间协调作业等等,实现自动化控制;也可通过互联网接受手机或电脑发送的远程控制信息,实现远程控制作业。
11.所述的其他辅助设施包括发电机、电源控制柜、螺旋桨、定位杆、卷管器、和防撞圈。
12.本实用新型是一种多功能保洁清淤船,既可以清理河湖水面油污,削减蓝藻数量,又可以进行自动化环保清淤作业,还可以通过水下摄像头实时监控水底淤泥的状态,实时地采用手动控制或远程控制的方式,控制多功能保洁清淤船按需求移动位置,按需求进行河湖水面保洁及清除水底的淤泥等作业。
13.本实用新型的有益效果:
14.1、可以快速方便地清理河湖水面漂浮垃圾和油污等,不仅减少了水面保洁用工成本,而且解决了人工无法清除的油污去除问题;
15.2、可快速削减水面蓝藻数量,为调水控藻争取时间;
16.3、可实现无害化清淤:
17.(1)无须淤泥堆场
18.可以在施工现场直接进行清淤,无须供泥浆存放沉淀的淤泥堆场,施工方便无二次污染,适合一些不具备提供淤泥堆场的清淤场所,如公园水体清淤、位于市区附近的水体等。
19.(2)无须远距离输送,泥饼袋装化方便再利用
20.清淤施工避免了泥浆的远距离输送,占地面积小,水底淤泥经过处理后,直接形成饼状或粉状并实现袋装化,方便进行淤泥的再利用。
21.(3)可远程监视和控制,智能化程度较高
22.清淤时可通过视频监控实行可视化施工,并且可实现多人同时远程监控(多人远程监视,一人远程监视并控制或手动控制),智能化程度较高,清淤效果更好。
附图说明
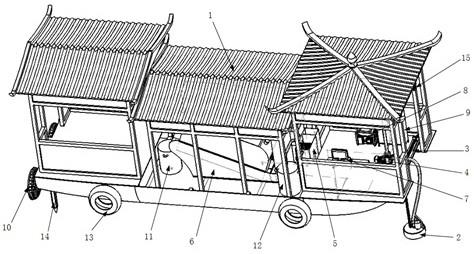
23.图1是多功能清淤保洁船结构分布图
24.图2是泥浆吸头及吸头移动机构结构图
25.图3是油污及蓝藻吸头结构图
26.图4是油水分离及泥浆预处理系统结构图
27.图中,1、画舫船,2、泥浆吸头,3、吸头移动机构,4、自吸泵,5、油水分离及泥浆预处理系统,6、泥水分离系统,7、智能控制系统,8、发电机,9、配电柜,10、螺旋桨,11、泥饼收集桶,12、油污收集桶,13、防撞圈,14、定位杆,15、超声波探测仪,16、水平导轨,17、水平移动丝杠,18、水平移动步进电机,19、移动平台,20、垂直移动步进电机,21、垂直移动丝杠,22、吸头连接器,23、连接销,24、防转杆,25、防护罩,26吸泥管道接口,27、泥浆搅拌机,28、水下摄像头,29、吸头壳体,30、吸排管道接口,31、后挡板,32、左挡板,33、右挡板,34、底部底部,35、安装端口,36、油水分离箱体,37、隔油板,38、格栅,39、进水口,40、溢流口,41、泥浆出口,42、油污出口吸油泵,43石块垃圾出口电子阀。
具体实施方式
28.下面结合附图对本实用新型做进一步说明。这些附图仅以示意方式对本实用新型的基本原理进行概要说明。
29.如图1
‑
4所示,本实用新型属于一种集清理水面油污、垃圾、蓝藻、水底淤泥等功能于一体的多功能清淤保洁船,它主要有画舫船1、自吸系统、油水分离及泥浆预处理系统5、泥水分离系统6、泥饼装袋系统、智能控制系统7和其他辅助设施等六部分组成;所述的画舫船1是采用画舫形式的景观船,为清淤保洁设备提供一个水上承载平台;所述的自吸系统包括吸头、吸头移动机构3、自吸泵4、吸排管道等,位于画舫船的前端,所述的吸头有泥浆吸头2、油污及蓝藻吸头等,分别应用于相应的场合;所述的泥浆吸头2由泥浆搅拌机27、防护罩25、吸泥管道接口,26、水下摄像头28等组成,所述的泥浆搅拌机27是能够扰动底泥使泥浆相对均匀的水下搅拌机,所述的防护罩25是一个能够防止扰动底泥时泥浆四处扩散造成二次污染的呈碗状刚体,所述的泥浆吸排管道接口26一端为管道接口,通过泥浆吸排管道与自吸系统入口连接,另一端为能够拦截较大异物又不影响自吸泵工作的镂空圆柱壳体,所述的水下摄像头28是固定在防护罩25前方的具有防水功能的红外线摄像头;所述的油污及蓝藻吸头由吸头壳体29、吸排管道接口30、挡板及安装端口35等组成,所述的吸头壳体29是长条形截面呈矩形或圆形薄壁构件,其上方均匀分布着吸孔,工作时吸孔位于水面以下约2cm至3cm处,其下方中间位置有一排水口与吸排管道接口30连通,所述的挡板是具有一定强度的板状刚体,确保能够挡住水草避免水草堵住吸孔,同时要能够防止油污或蓝藻从后方或两侧溢出。所述的吸头移动机构3由水平导轨16、水平丝杠17、水平移动步进电机18、移动平台19、垂直移动步进电机20、垂直移动丝杠21和防转设施等组成,所述的垂直移动丝杠21下端适配有防止吸头意外脱落的凸台,所述的防转设施包括吸头连接器22、连接销23、轴承、防转杆24等;所述的自吸泵是具有一定的吸程,确保能够快速抽吸泥浆或蓝藻等物体的泵;所述的吸排管道包括抽吸管道和排污管道,所述的抽吸管道一端与自吸泵4入口连接,一端与泥浆吸头2或油污吸头或蓝藻吸头连接,所述的排污管道一端与自吸泵4出口连接,另一端与油水分离及泥浆预处理系统5的进水口39连接。
30.所述的油水分离及泥浆预处理系统5是油水分离箱体36、隔油板37、格栅38、进水口39、溢流口40、泥浆出口41、油污出口吸油泵42和石块垃圾出口电子阀43等构成。所述的泥水分离系统6由设备主体、絮凝混合池、自动加药装置、泥浆脱水设施等组成,所述的油水分离及泥浆预处理系统5的溢流口40适配有可启闭的手动阀门及电子阀门,所述的泥浆出口41处适配有加压泵,通过加压泵与泥水分离系统6的絮凝混合池连接,所述的泥浆脱水设
施是能够连续工作的泥浆脱水设备,所述的自动加药装置是能够自动添加药剂,加水搅拌均匀,按设定的计量将药剂加入加药搅拌池的设备,加药量可人为控制,也可自动控制,根据泥水分离系统出水状况自动调整加药量。
31.所述的泥饼装袋系统是将经过泥水分离出来的泥饼进行粉碎装袋的设施,位于泥水分离系统6出泥端,泥饼装袋系统分为人工泥饼装袋系统和自动泥饼装袋系统两种,根据不同需求配备,人工泥饼装袋系统主要包括泥饼收集桶11和泥饼袋子,自动泥饼装袋系统包括机械手、泥饼袋子、切换挡板等。
32.所述的智能控制系统7主要包括测控探头、智能控制存储器及无线收发模块等四个部分,所述的测控探头包括水下摄像头28、水面摄像头和超声波探测仪15等设备,所述的水下摄像头28固定在泥浆吸头2的防护罩25上,是带有红外线夜景拍摄功能的摄像头,并在摄像头前方适配有照明组件,所述的照明组件是由几组高亮冷光源的led灯组成;所述的水面摄像头位于画舫船的前方,水面摄像头视角的调整应当确保能够观察到画舫船前进方向水面油污、悬浮垃圾及障碍物等;所述的超声波探测仪15是能够测量淤泥深度的仪器,位于泥浆吸头2前方画舫船1前檐下;所述的智能控制存储器是由数据处理器、控制模块、存储模块、显示器、输入输出接口以及手动控制、自动控制和远程控制切换开关等组成,可通过手动控制进行现场操作,也可通过数据电缆线与获取工况基本信息的摄像头、超声波探测仪连接,将获取的视频信息实时送往显示器和无线收发模块,在显示器或手机上实时观察现场工作状况,记录水下清淤的全过程,同时可根据工况信息发出相应的驱动信号,驱动螺旋桨10控制画舫船1的移动,驱动吸头2的移动,控制自吸泵4、油水分离设备及泥水分离设备之间协调作业等等,实现自动化控制;也可通过互联网接受手机或电脑发送的远程控制信息,实现远程控制作业。
33.所述的其他辅助设施包括发电机8、电源控制柜9、螺旋桨10、定位杆14、卷管器、防撞圈13等用于辅助设施设备。
34.本实用新型是一种集清理水面油污、垃圾、蓝藻、水底淤泥等功能于一体的多功能保洁清淤船,当清理水面油污、垃圾时,将吸头更换为油污及蓝藻吸头,通过智能控制系统7手动或自动控制或远程控制的方式,开启油水分离及泥浆预处理系统5的溢流口40阀门,控制吸头移动机构3,根据水面油污或垃圾的位置及实际清理现状,将吸头高度调整到距离水面以下约2cm至3cm处,并实时地调整画舫船1及吸头的相对水平位置,开启自吸泵4,水面的油污、垃圾在自吸泵4的作用下,通过自吸泵4的吸排管道进入油水分离及泥浆预处理系统5,由格栅38拦截较大颗粒的垃圾,在油水分离箱体36中,水流速度得到缓冲,水中的油污及细小的漂浮垃圾会逐渐聚集在水面,被拦截在隔油板37前面,经油污出口吸油泵42进入油污收集桶12,洁净的水从隔油板37底部经过溢流口40返回水体,循环往复作业,达到快速清理水面油污及垃圾的目的;工作结束时,将吸头复位,放空油水分离箱体36中剩余的水,开启石块垃圾出口电子阀43,将垃圾排出清理干净即可。
35.当清理水面蓝藻时,将吸头更换为油污及蓝藻吸头,通过智能控制系统7手动或自动控制或远程控制的方式,关闭油水分离及泥浆预处理系统5的溢流口40阀门,控制吸头移动机构3,根据水面蓝藻的位置及实际清理现状,将吸头高度调整到距离水面以下约10cm至20cm处,并实时地调整画舫船1及吸头的相对水平位置,开启自吸泵4,水面的蓝藻在自吸泵4的作用下,通过自吸泵4的吸排管道进入油水分离及泥浆预处理系统5,进行初步沉淀,通
过泥浆出口41处的加压泵,进入泥水分离系统6中的絮凝混合池,蓝藻在絮凝剂的作用下聚集在一起,再经过泥浆脱水设施脱水后,进行装袋处理;工作结束时,将吸头复位。
36.当清理水底淤泥时,将吸头更换为泥浆吸头2,通过智能控制系统7手动或自动控制或远程控制的方式,关闭油水分离及泥浆预处理系统5的溢流口40阀门,控制吸头移动机构3,根据超声波探测仪15获得的水底淤泥的分布情况,以及水下摄像头28获得的实际清淤现状,实时地调整画舫船1及泥浆吸头2的相对水平位置,将泥浆吸头2高度调整到水底淤泥处,将画舫船1尾部的定位杆14插入水底硬泥中,防止清淤过程中,泥浆吸头2移动带动画舫船移动造成遗漏现象,开启泥浆搅拌机27,将水底淤泥搅拌均匀,同时开启自吸泵4,搅拌后的泥浆在自吸泵4的作用下,通过自吸泵4的吸排管道进入油水分离及泥浆预处理系统5,由格栅38拦截较大颗粒的石块及垃圾,在油水分离箱体36中,泥浆流动速度得到缓冲,进行初步沉淀,泥浆中的油污及细小的漂浮垃圾会逐渐聚集在水面,被拦截在隔油板37前面,经油污出口吸油泵42进入油污收集桶12;经过沉淀的泥浆通过泥浆出口41处的加压泵,进入泥水分离系统6中的絮凝混合池,此时,加药泵也定量地对絮凝混合池输送药液,搅拌电机带动整个搅拌系统将污泥与药液进行充分混合,从而产生矾花,当液位达到液位传感器上位时,此时液位传感器得到信号,泥浆脱水设施开始工作,脱水后的泥饼可通过人工或自动装袋系统进行装袋处理;工作结束时,将吸头复位,放空油水分离箱体36中剩余的水,开启石块垃圾出口电子阀43,将垃圾排出清理干净即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1