一种自升平台船抬升锁紧控制装置的制作方法
1.本实用新型涉及海洋船舶术领域,具体涉及一种自升平台船抬升锁紧控制装置。
背景技术:
2.据统计,1955
‑
至今,在所有海上移动平台中,自升式平台事故占全部平台事故数量的75%,分析表明,事故中超过50%发生在拖航和升降过程中,因此,对自升式平台抬升锁紧控制装置的研究极为重要。抬升锁紧装置是自升式平台船最核心的装备,主要由升降执行机构、锁紧执行机构、电控柜、控制台等组成。主要功能为当平台船就位后,通过升降执行机构将平台船抬升出水至一定气隙后,再由锁紧执行机构锁定船体,为海上施工作业做好准备,作业结束后,再将平台船下降入水,拔出桩腿,使平台船恢复漂浮状态,拖航至下一个目标船位。传统自升平台船的抬升锁紧控制装置缺乏适应性、工效较低、存在故障率高和稳定性差。
技术实现要素:
3.本实用新型针对上述所述的缺乏适应性、工效较低、存在故障率高和稳定性差的技术问题,提供了一种自升平台船抬升锁紧控制装置,能够有效提高适应性、安全性和稳定性。
4.为了解决上述技术问题,本实用新型提供了一种自升平台船抬升锁紧控制装置,包括用于升降平台船的抬升系统和用于锁紧平台船的锁紧系统,所述抬升系统包括连接在平台桩腿和抬升平台交界处的平行减速箱,所述平行减速箱的齿轮与桩腿外侧的齿条啮合用以带动桩腿上下运动,所述平行减速箱的另一侧连接制动器、所述制动器的另一侧连接提供驱动力的变频电机;
5.所述锁紧系统包括设置在抬升系统和主甲板之间的以桩腿为中心对称的上齿形块和下齿形块,所述上齿形块和下齿形块之间连接紧锁齿形块,所述紧锁齿形块的侧面设置有所述齿轮夹紧的齿状结构,所述上齿形块和下齿形块分别连接涡轮蜗杆传动装置。
6.作为优化,所述平行减速箱与平台桩腿和抬升平台交界处之间还设置行星减速箱。
7.作为优化,所述紧锁齿形块的侧面连接油缸。
8.作为优化,还包括和控制抬升系统和锁紧系统的控制系统,所述控制系统包括升降控制柜、驱动器和plc控制器,所述升降控制柜、驱动器和plc控制器通过网络连接。
9.作为优化,所述网络采用双环网拓扑结构。
10.本实用新型相较于现有技术取得了以下技术效果:
11.本实用新型一种自升平台船抬升锁紧控制装置,抬升系统通过齿轮齿条的形式驱动桩腿上下运动,实现平台的抬升或下降;锁紧系统通过设置紧锁齿形块对桩腿进行夹紧,通过上齿形块和下齿形块来带动紧锁齿形块上下移动来适应不同位置的夹紧;控制系统通过设置升降控制柜、驱动器和plc控制器使运行精确、稳定。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
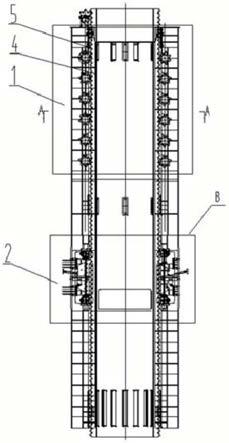
13.图1为本实用新型整体结构主视图;
14.图2为本实用新型a
‑
a结构视图;
15.图3为本实用新型b放大结构示意图;
16.图4为本实用新型控制系统结构示意图;
17.其中1
‑
抬升系统;101
‑
平行减速箱;102
‑
制动器;103
‑
变频电机;104
‑
行星减速箱;2
‑
锁紧系统;201
‑
上齿形块;202
‑
下齿形块;203
‑
紧锁齿形块;204
‑
涡轮蜗杆传动装置;205
‑
油缸;3
‑
控制系统;301
‑
升降控制柜;302
‑
驱动器;303
‑
plc控制器;4
‑
桩腿;5
‑
齿条。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.本实用新型提供了一种自升平台船抬升锁紧控制装置,能够有效提高适应性、安全性和稳定性。
20.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
21.如图1
‑
4所示,本实用新型提供了一种自升平台船抬升锁紧控制装置,包括用于升降平台船的抬升系统1和用于锁紧平台船的锁紧系统2,当平台船就位后,通过抬升系统1将平台船抬升与水平面有一定的间隙后,通过锁紧系统2锁紧固定后再进行作业;所述抬升系统1包括连接在平台桩腿4和抬升平台交界处的平行减速箱101,所述平行减速箱101的齿轮与桩腿4外侧的齿条5啮合用以带动桩腿4上下运动,所述平行减速箱101的另一侧连接制动器102、所述制动器102的另一侧连接提供驱动力的变频电机103;通过齿轮5、齿条的驱动使桩腿4上下运动,通过平行减速箱101和制动器102使桩腿4运动更为平稳。
22.所述锁紧系统2包括设置在抬升系统1和主甲板之间的以桩腿4为中心对称的上齿形块201和下齿形块202,所述上齿形块201和下齿形块202之间连接紧锁齿形块203,所述紧锁齿形块203的侧面设置有所述齿轮夹紧的齿状结构,通过齿状
‑
齿状的啮合,可以使锁紧系统2夹紧力增大,所述上齿形块201和下齿形块202分别连接涡轮蜗杆传动装置204,涡轮蜗杆传动装置204为上齿形块201和下齿块202提供动力,移动上齿形块201和下齿形块202可以使紧锁齿形块203在桩腿的任意位置啮合或者脱离。
23.具体的,在本方案的实施例中,为了进一步提高稳定性,所述平行减速箱101与平台桩腿4和抬升平台交界处之间还设置行星减速箱104。
24.具体的,在本方案的实施例中,为了进一步增大夹紧力,所述紧锁齿形块203的侧面连接油缸205。
25.具体的,在本方案的实施例中,为了使抬升系统1和锁紧系统2运行的更稳定,还包括控制抬升系统1和锁紧系统2的控制系统3,所述控制系统3包括升降控制柜301、驱动器302和plc控制器303,所述升降控制柜301、驱动器302和plc控制器303通过网络连接;控制升降柜301指示plc控制器303,plc控制器303控制变频电机103和蜗轮蜗杆传动装置201,使变频电机103和蜗轮蜗杆传动装置201上升或下降更稳定。
26.具体的,在本方案的实施例中,为了保证网络稳定,所述网络采用双环网拓扑结构。
27.本实用新型中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1