作业机的制作方法
1.本发明涉及作业机。
背景技术:
2.以往,公知有专利文献1所公开的作业机。专利文献1所公开的作业机是具备机体、推土机装置、动臂、斗杆以及铲斗的反铲挖掘机。在该作业机中,能够通过动臂缸、斗杆缸、铲斗缸的伸缩分别使动臂、斗杆、铲斗摆动。在先技术文献专利文献
3.专利文献1:日本专利公开公报“日本特开2017-65569号公报”
技术实现要素:
(发明要解决的课题)
4.然而,在以往的作业机中,斗杆缸的可行程范围设定为铲斗不与动臂缸抵接。因此,在以往的作业机中,即使进行使铲斗的前端部接近推土机装置的铲板的操作,也存在不能使铲斗的前端部充分接近推土机装置的铲板的情况。
5.本发明鉴于上述问题,其目的在于提供一种能够使作业工具的前端部充分接近推土机装置的铲板的作业机。(用于解决课题的技术方案)
6.本发明的一个方式所涉及的作业机具备:机体;推土机装置,其具有铲板;斗杆,其以能够向接近所述动臂的斗杆铲装方向和远离所述动臂的斗杆倾卸方向摆动的方式枢轴支承于所述动臂;作业工具,其经由枢轴枢轴支承于所述斗杆,通过绕所述枢轴摆动,能够在前端部最接近所述斗杆的作业工具铲装位置与所述前端部最远离所述斗杆的作业工具倾卸位置之间摆动;动臂缸,其使所述动臂摆动;斗杆缸,其使所述斗杆向所述斗杆铲装方向以及所述斗杆倾卸方向摆动;斗杆铲装限制部,其限制所述斗杆缸的所述斗杆铲装方向的行程,使得所述作业工具的前端部的摆动轨道与所述动臂缸隔开;以及铲装限制解除部,其在供所述作业工具以所述作业工具倾卸位置附近的作业姿势配置于接近所述铲板的位置的、动臂的摆动位置处,解除所述斗杆缸的所述行程的限制,使得所述斗杆能够摆动到摆动范围在所述斗杆铲装方向上的末端。此外,所述作业机具备作业工具铲装限制部,其在所述铲装限制解除部解除了所述行程的限制时,限制所述作业工具向所述作业工具铲装位置摆动的方向的摆动。此外,所述作业机具备对所述动臂的摆动进行控制的动臂控制部,在所述铲装限制解除部解除了所述行程的限制的状态下,在所述动臂从所述作业工具的所述前端部与所述铲板之间的间隔为最小距离时的第一摆动位置向第二摆动位置上升了给定角度时,所述动臂控制部停止所述动臂的上升,直到所述斗杆返回到不进行所述斗杆缸的行程限制的区域。
此外,所述作业机具备对所述斗杆的摆动进行控制的斗杆控制部,在所述铲装限制解除部解除了所述行程的限制的状态下,在所述动臂从所述作业工具的所述前端部与所述铲板之间的间隔为最小距离时的第一摆动位置向第二摆动位置上升了给定角度时,所述斗杆控制部进行控制使得所述斗杆返回到不进行斗杆缸的行程限制的区域。(发明效果)
7.根据上述结构,在利用动臂、斗杆、作业工具而构成的作业装置取使作业工具的前端部接近铲板的作业位置的情况下,能够使作业工具的前端部充分接近铲板,且在取其他作业位置的情况下,能够防止作业工具与动臂缸抵接。
附图说明
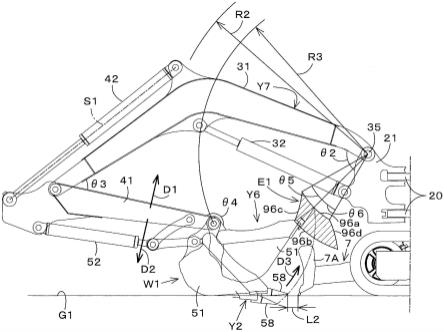
8.图1是作业机的侧视图。图2是示出作业机的液压系统的图。图3是示出动臂的摆动位置的变化状态的图。图4是用于说明未解除斗杆铲装限制的情况下的铲斗和铲板的位置关系的图。图5是用于说明解除了斗杆铲装限制的情况下的铲斗和铲板的位置关系的图。图6是示出铲斗和铲板的位置关系的放大图。图7是使动臂从第一摆动位置上升到第二摆动位置时的侧视图。图8是使动臂从第一摆动位置下降到第三摆动位置时的侧视图。
具体实施方式
9.以下,适当参照附图对本发明的一个实施方式进行说明。图1是本实施方式所涉及的作业机1的概略侧视图。在本实施方式中,作为作业机1,例示了作为回转作业机的反铲挖掘机。如图1所示,作业机1具备行驶体1a和装备于行驶体1a的作业装置4。行驶体1a具有行驶装置3和搭载于行驶装置3的机体(回转台)2。在机体2搭载有供操作员落座的驾驶座6。
10.在本实施方式中,以就座于驾驶座6的操作员的前侧(图1的箭头a1方向)为前方,以操作员的后侧(图1的箭头a2方向)为后方,以驾驶员的左侧(图1的近前侧)为左方,以操作员的右侧(图1的里侧)为右方进行说明。此外,将与前后方向k1正交的方向即水平方向作为机体宽度方向(机体2的宽度方向)进行说明。将从机体2的宽度方向的中央部朝向右部或者左部的方向作为机体外侧(机体宽度方向k2的外侧)进行说明。也就是说,机体外侧是指机体宽度方向k2且远离机体2的宽度方向的中心的方向。将与机体外侧相反的方向作为机体内侧(机体宽度方向的内侧)进行说明。也就是说,机体内侧是指机体宽度方向且接近机体2的宽度方向的中心的方向。
11.如图1所示,行驶装置3是将机体2支承为能够行驶的装置。行驶装置3由液压马达(液压制动器)或者电动马达等构成的行驶马达11驱动。此外,在本实施方式中,使用履带式的行驶装置3,但不限于此,也可以使用车轮式等行驶装置。在行驶装置3的前部装配有推土机装置7。推土机装置7能够通过使未图示的推土机缸(液压制动器)伸缩来使铲板(排土板)7a升降(上升下降)。
12.机体2经由回转轴承8能够绕回转轴心x1回转地支承在行驶装置3上。回转轴心x1
是通过回转轴承8的中心的沿上下方向延伸的轴心。在机体2搭载有原动机。原动机是柴油发动机。此外,原动机可以是汽油发动机或者电动马达,也可以是具有发动机以及电动马达的混合型。
13.机体2具有绕回转轴心x1回转的回转基板9。回转基板9由钢板等形成,构成机体2的底部。原动机搭载于该回转基板9。在机体2的后部设有平衡块10。机体2在前部具有支承作业装置4的支承托架20和摆动托架21。支承托架20从机体2向前方设为突出状。在支承托架20的前部(从机体2突出的部分),经由摆动轴能够绕纵轴(沿上下方向延伸的轴心)摆动地安装有摆动托架21。因此,摆动托架21能够沿机体宽度方向(以摆动轴为中心沿水平方向)转动。
14.作业装置4具有动臂装置30、斗杆装置40以及作业工具装置50。动臂装置30具有动臂31和动臂缸32。动臂31具有:基部31a,其经由沿摆动托架21的第一枢轴支承部23的机体宽度方向延伸的横轴35而被支承为能够摆动(转动自如);前端部31b,其将斗杆41支承为摆动自如;以及中间部31c,其设于基部31a和前端部31b之间。中间部31c沿着长度方向为长条状,在中途部向下方弯曲。在中间部31c中的弯曲部的一侧(下部侧)设有下部托架33,在中间部31c中的弯曲部的另一侧(上部侧)设有上部托架34。
15.动臂缸32是使动臂31摆动(转动)的能够伸缩的液压缸,具备筒状的缸部32a和一端侧相对于缸部32a能够滑动的杆32b。动臂缸32配置在动臂31中的斗杆41向斗杆铲装方向d1摆动时与斗杆41对置的一侧。也就是说,动臂缸32设于动臂31的前面侧的下部。动臂缸32的基端部摆动自如地支撑于摆动托架21的第二枢轴支承部24的横轴36,动臂缸32的前端部摆动自如地支撑于下部托架33的横轴37。因此,动臂装置30(动臂31)能够在第一枢轴支承部23绕横轴35转动,该动臂装置30(动臂31)向上方或下方摆动自如。此外,也可以在动臂缸32中的斗杆41侧(下部侧)的面上具备防止其他物体与杆32b以及/或者缸部32a的接触的保护构件(缸保护件)。
16.斗杆装置40具有斗杆41和斗杆缸42。斗杆41沿着长度方向为长条状。斗杆41的基端部经由横轴43摆动自如地支承于动臂31的前端部31b。此外,在斗杆41的基端部的上表面侧设有上部托架44。斗杆缸42是使斗杆41摆动的能够伸缩的液压缸。斗杆缸42的基端部摆动自如地支承于动臂31的上部托架34的横轴38,斗杆缸42的前端部摆动自如地支承于上部托架44的横轴46。因此,斗杆装置40(斗杆41)能够在动臂31上绕横轴43转动,该斗杆装置40(斗杆41)向上或向下(前方或后方)摆动自如。也就是说,如图1所示,斗杆41以能够向接近动臂31的斗杆铲装方向d1和远离动臂31的斗杆倾卸方向d2的方式枢轴支承于动臂31。在本实施方式中,通过使斗杆缸42伸长(向斗杆铲装方向d1行进)而斗杆41向斗杆铲装方向d1摆动,通过使斗杆缸42收缩(向斗杆倾卸方向d2行进)而斗杆41向斗杆倾卸方向d2摆动。
17.作业工具装置50具有作为作业工具的铲斗51和作为作业工具缸的铲斗缸52。铲斗51经由枢轴57摆动自如地支承于斗杆41的前端部。在铲斗51和斗杆41的前端部之间设有连杆机构53。铲斗51具有作为挖起沙土等的部分的铲斗主体51a、和作为安装于斗杆41以及连杆机构53的部分的安装托架51c。铲斗主体51a具有底面51b和前端部(爪部)58。
18.铲斗缸52由使铲斗51摆动的能够伸缩的液压缸构成。铲斗缸52的基端部摆动自如地支承于斗杆41的上部托架44的横轴48,铲斗缸52的前端部摆动自如地支承于连杆机构53
的横轴56。因此,作业工具装置50(铲斗51)以能够进行铲装动作(挖起动作)以及倾卸动作设于斗杆41的前端侧。铲装动作(挖起动作)是指使铲斗51的前端部58向接近动臂31(斗杆41)的方向即铲斗铲装方向(作业工具铲装方向)摆动的动作,例如是挖起砂土等的情况下的动作。此外,倾卸动作是指使铲斗51的前端部58向远离动臂31(斗杆41)的方向即铲斗倾卸方向(作业工具倾卸方向)摆动的动作,例如,是使挖起的沙土等落下(排出)的情况下的动作。
19.因此,如图1所示,铲斗51能够在使铲斗缸52最伸长(在铲斗铲装方向d3上行进最大)的位置且前端部58最接近斗杆41的铲斗铲装位置(作业工具铲装位置)y1与使铲斗缸52最收缩(在铲斗倾卸方向d4上行进最大)的位置且前端部58最远离斗杆41的铲斗倾卸位置(作业工具倾卸位置)y2之间摆动。在图1中,m3示出铲斗51在铲斗铲装位置y1和铲斗倾卸位置y2之间移动时的前端部58的摆动轨道。
20.作业机1能够代替铲斗51或在此基础上装配能够由液压制动器驱动的其他的作业工具(液压附属装置)。作为其他的作业工具,能够例示液压破碎机、液压压碎机、角钢、土钻、托盘叉、清扫机、砂床、吹灰机等。图2是示出使作业装置4工作的作业机1的液压系统的图。
21.如图2所示,作业机1的液压系统具有动臂控制阀71、斗杆控制阀72、铲斗控制阀73、控制装置60、操纵装置19l、19r、动臂角度传感器91、臂角度传感器92、以及作业工具角度传感器93。动臂控制阀71、斗杆控制阀72以及铲斗控制阀73分别经由油路与动臂缸32、斗杆缸42、铲斗缸52连接。此外,排出工作油的液压泵p1分别经由油路与动臂控制阀71、斗杆控制阀72以及铲斗控制阀73连接。
22.动臂控制阀71、斗杆控制阀72以及铲斗控制阀73例如是电磁式的3位置切换阀。具体地,动臂控制阀71是通过对第一螺线管71d以及第二螺线管71e进行励磁或消磁而能够切换到第一位置71a、第二位置71b、第三位置71c的直动滑阀型切换阀。若动臂控制阀71切换到第一位置71a,则通过工作油向动臂缸32的供给、排出,该动臂缸32伸长,动臂31向上升的方向摆动。另一方面,若动臂控制阀71切换到第二位置71b,则通过工作油向动臂缸32的供给、排出,该动臂缸32收缩,动臂31向下降的方向摆动。
23.斗杆控制阀72是通过对第一螺线管72d以及第二螺线管72e进行励磁或消磁而能够切换到第一位置72a、第二位置72b、第三位置72c的直动滑阀型切换阀。若斗杆控制阀72切换到第一位置72a,则通过工作油向斗杆缸42的供给、排出,该斗杆缸42伸长,斗杆41朝向斗杆铲装方向d1(后方且下方)摆动。另一方面,若斗杆控制阀72切换到第二位置72b,则通过工作油向斗杆缸42的供给、排出,该斗杆缸42收缩,斗杆朝向倾卸方向d2(前方且上方)摆动。
24.铲斗控制阀73是通过对第一螺线管73d以及第二螺线管73e进行励磁或者消磁而能够切换到第一位置73a、第二位置73b、第三位置73c的直动滑阀型切换阀。若铲斗控制阀73切换到第一位置73a,则通过工作油向铲斗缸52的供给、排出,该铲斗缸52伸长,铲斗51向作业工具铲装方向d3(挖起的方向)摆动。另一方面,若铲斗控制阀73切换到第二位置73b,则通过工作油向铲斗缸52的供给、排出,该铲斗缸52收缩,铲斗51向倾卸方向d4摆动。
25.控制装置60具备动臂控制部61、斗杆控制部62、以及铲斗控制部63,动臂控制阀
71、斗杆控制阀72以及铲斗控制阀73的切换动作。即,控制装置60控制动臂31、斗杆41以及铲斗51的动作。控制装置60可以通过形成在集成电路(ic芯片)等的逻辑电路(硬件)来实现,也可以使用计算机通过软件来实现。在后者的情况下,上述计算机具备:以计算机能够读取的方式记录有实现控制装置60的各功能的软件即程序以及与作业机1有关的各种数据的记录介质、执行上述程序的命令的cpu(central processing unit)等运算电路、以及展开上述程序以及各种数据的ram(random access memory)等。而且,通过运算电路从上述记录介质读取上述程序并执行,实现控制装置60的功能。
26.在控制装置60上连接有在操作时操作员把持的操纵装置19l、19r。操纵装置19l、19r分别设置在驾驶座6的附近。操纵装置19l、19r分别具有操作杆15和位置传感器16。操作杆15从中立位置向前、后、右、左摆动自如,位置传感器16检测操作杆15从前、后、右、左的中立位置起的摆动量(操作量)。
27.例如,若操作员使操纵装置19r的操作杆15向前或向后摆动,则向前或向后摆动时的摆动量输入到控制装置60。动臂控制部61(控制装置60)根据获取的操作杆15的摆动方向以及摆动量,对第一螺线管71d以及第二螺线管71e进行励磁或者消磁,由此进行动臂控制阀71的切换。也就是说,动臂控制部61控制动臂31的摆动。
28.此外,若操作员使操纵装置19l的操作杆15向前或向后摆动,则向前或向后摆动时的摆动量输入到控制装置60。斗杆控制部62(控制装置60)根据获取的操作杆15的摆动方向以及摆动量,对第一螺线管72d以及第二螺线管72e进行励磁或者消磁,由此进行斗杆控制阀72的切换。也就是说,斗杆控制部62控制斗杆41的摆动。
29.此外,若操作员使操纵装置19r的操作杆15向左或右摆动,则向左或右摆动时的摆动量输入到控制装置60。铲斗控制部63(控制装置60)根据获取的操作杆15的摆动方向以及摆动量,对第一螺线管73d以及第二螺线管73e进行励磁或者消磁,由此进行铲斗控制阀73的切换。也就是说,铲斗控制部63控制铲斗51的摆动。
30.动臂角度传感器91、臂角度传感器92以及铲斗角度传感器(作业工具角度传感器)93与控制装置60连接。动臂角度传感器91检测动臂31的摆动角度θ2(摆动位置)。臂角度传感器92检测斗杆41的摆动角度θ3(摆动位置)。铲斗角度传感器93检测铲斗51相对于斗杆41的前端部绕枢轴57的摆动角度θ4(摆动位置)。在本实施方式中,作为动臂角度传感器91、臂角度传感器92以及铲斗角度传感器93而使用电位计,但不限于此,也可以使用其他的角度传感器,或者,也可以检测动臂缸32、斗杆缸42以及铲斗缸52的行程(伸长位置),并根据该检测结果来计算动臂31、斗杆41以及铲斗51的摆动角度。
31.如图2所示,控制装置60具有斗杆铲装限制部64。如图3所示,斗杆铲装限制部64限制斗杆缸42的斗杆铲装方向d1的行程s1,使得铲斗(作业工具)51的前端部58的摆动轨道m3与动臂缸32(在有缸保护件4件的情况下为缸保护件)隔开。由此,能够防止铲斗51的前端部58对动臂缸32干扰(抵接)。
32.图3示出动臂31的摆动位置的变化状态、斗杆41位于斗杆铲装方向d1的限制位置y10的状态、使铲斗51从铲斗铲装位置y1摆动到铲斗倾卸位置y2的状况。摆动位置y3示出动臂31的最上方位置。摆动位置y4示出动臂31的最下方位置。摆动位置y5示出最上方位置y3和最下方位置y4之间的动臂31的中间位置。在后述的行程s1的限制解除域以外,限制(斗杆铲装限制)斗杆缸42的斗杆铲装方向d1的行程s1,使得摆动轨道m3与动臂缸32(缸保护件)
隔开。在图3中,虚线所示的线r1是在斗杆41位于限制位置y10的状态下,动臂31在最上方位置y3和最下方位置y4之间摆动的过程中与摆动轨道m3接触的线。
33.如图2所示,控制装置60具有铲装限制解除部65。铲装限制解除部65在通过作业装置4进行特定的作业时,解除斗杆铲装限制,使得能够进行该作业。详细地说,如图5所示,在铲斗51以铲斗倾卸位置y2附近的作业姿势w1配置在接近铲板7a的位置的动臂31的摆动位置y7,解除斗杆缸42的行程s1的限制,使得能够使斗杆41摆动到摆动范围在斗杆铲装方向d1上的末端。
34.然而,作为由作业机1进行的作业,例如有利用推土机装置7的铲板7a的前面(铲板面)用铲斗51铲起土的所谓的“铲取作业”。在该“铲取作业”中,铲斗51位于铲斗倾卸位置y2附近(铲斗51的摆动角度θ4比设定的阈值更靠铲斗倾卸位置y2侧),采取使铲斗主体51a的底面51b朝向下方(地面g1)的作业姿势w1(参照图4、图5)。
35.图4示出在动臂31的上下摆动区域的整个区域中由斗杆铲装限制部64进行斗杆铲装限制的情况下的“铲取作业”的方式。如图4所示,在通过斗杆收回限制部64进行斗杆收回限制的情况下,使斗杆41以最接近动臂缸32的方式摆动,在以铲斗51在作业姿势w1下底面51b与地面g1接触的方式使动臂31下降的状态下,前端部58与叶片7a的铲尖7a1之间的距离为l1。
36.图5示出通过铲装限制解除部65解除了斗杆铲装限制的情况下的“铲取作业”的方式。如图5所示,在铲装限制解除部65解除了斗杆铲装限制的情况下,在使斗杆41以最接近动臂缸32的方式摆动,并使铲斗51在作业姿势w1下底面51b与地面g1接地的方式使动臂31下降的状态下,前端部58和铲板7a的铲尖7a1之间的距离为l2(最小距离)。距离l2<距离l1。也就是说,通过解除斗杆铲装限制,在进行“铲取作业”的情况下,能够使铲斗51的前端部58接近铲板7a的铲尖7a1。由此,能够高效地进行“铲取作业”。
37.在斗杆缸42的铲装方向d1的行程s1被限制的状态下,若动臂31进行下降操作直至动臂31的摆动角度θ2成为给定角度,则铲装限制解除部65解除斗杆铲装限制。若斗杆铲装限制解除,则能够使斗杆缸42的铲装方向d1的行程s1伸长至末端,因此能够使斗杆41靠近动臂31。于是,图5所示的从横轴37到枢轴57的最短距离r3比图4所示的从横轴37到枢轴57的最短距离r2小,进而,通过降下动臂31(减小摆动角度θ2),能够使铲斗51的前端部58靠近铲板7a侧。
38.此外,在进行削去构造物的地面等的所谓的“铲削作业”时也能够起到同样的效果。也就是说,斗杆铲装限制的解除在通过铲斗51和铲板7a进行协调作业时是有效的。此外,在本实施方式中,设为铲斗51的前端部58与铲板7a的铲尖7a1之间的距离l2具有间隔的构成,但也可以构成为使铲斗51的前端部58与铲板7a的铲尖7a1接触(距离l2=0)。
39.如图2所示,控制装置60具有铲斗铲装限制部(作业工具铲装限制部)66。铲斗铲装限制部66在通过铲装限制解除部65解除了斗杆缸42的行程s1的限制时,限制铲斗51的铲斗铲装方向d3的摆动。图5所示的铲斗51的摆动位置y6表示在解除斗杆铲装限制时能够使铲斗51向铲装方向d3摆动的最大的摆动位置。也就是说,铲斗铲装限制部66限制铲斗缸52的铲斗铲装方向d3的行程,使得铲斗51不比摆动位置y6更向铲斗铲装方向d3摆动。
40.图5中用斜线表示的区域e1表示相对于未进行斗杆铲装限制的解除时的铲斗51的作业范围,在进行斗杆铲装限制的解除时增加的铲斗51的作业范围的增加作业区域。也如图6所示,区域e1被第一轮廓线96a~第四轮廓线96d包围。第一轮廓线96a是在铲斗51位于摆动位置y6的状态下使动臂31升降时的前端部58的轨道的一部分。第二轮廓线96b是图3所示的线r1的一部分。第三轮廓线96c是使动臂31从图5所示的、使前端部58与铲板7a之间隔为最小距离l2时的动臂31的摆动位置y7(第一摆动位置)上升了给定角度θ5状态时的前端部58的轨道的一部分。第四轮廓线96d是使动臂31从第一摆动位置y7下降了给定角度θ6状态时的前端部58的轨道的一部分。该区域e1是没有实用性的作业区域,是没有障碍的作业区域。
41.图7示出使动臂31从第一摆动位置y7上升了给定角度θ5(例如,15
°
)的动臂31的摆动位置(第二摆动位置)y8。在斗杆铲装限制被解除且动臂31从第一摆动位置y7上升到第二摆动位置y8的情况下,动臂控制部61停止动臂31的上升,直到操作员将斗杆41向斗杆倾卸方向d2操作而斗杆41返回到不进行斗杆缸42的行程限制的区域。若斗杆41返回到不进行斗杆缸42的行程限制的区域,则能够将动臂31从第二摆动位置y8向上方摆动。此外,在动臂31的从第二摆动位置y8到上方的动臂摆动区域中,进行斗杆铲装限制。
42.此外,在斗杆铲装限制被解除且动臂31从第一摆动位置y7上升到第二摆动位置y8的情况下,也可以通过斗杆控制部62进行控制,使得斗杆41自动地返回到不进行斗杆缸42的行程限制的区域。图8示出使动臂31从第一摆动位置y7下降了给定角度θ6(例如,15
°
)的动臂31的摆动位置(第三摆动位置)y9。
43.在该情况下,也可以进行与从上述第一摆动位置y7上升到第二摆动位置y8时的控制同样的控制。即,在斗杆铲装限制被解除且动臂31从第一摆动位置y7下降到第三摆动位置y9的情况下,动臂控制部61停止动臂31的下降,直到操作员将斗杆41向斗杆倾卸方向d2操作而斗杆41返回到不进行斗杆缸42的行程限制的区域。
44.或者,在斗杆铲装限制被解除且动臂31从第一摆动位置y7下降到第三摆动位置y9的情况下,也可以通过斗杆控制部62进行控制,使得斗杆41自动地返回到不进行斗杆缸42的行程限制的区域。此外,关于动臂31从第一摆动位置y7下降的一侧(动臂31的下降侧),由于不是通过解除斗杆铲装限制而能够进行有意义的作业的作业范围,因此也可以在动臂31的下降侧整个区域内解除斗杆铲装限制。
45.上述作业机1具备:机体2;推土机装置7,其具有铲板7a;动臂31,其能够上下摆动地枢轴支承于机体2;斗杆41,其以能够向接近动臂31的斗杆铲装方向d1和远离动臂31的斗杆倾卸方向d2摆动的方式枢轴支承于动臂31;作业工具51,其经由枢轴57枢轴支承于该斗杆41,通过绕枢轴57摆动,能够在前端部58最接近斗杆41的作业工具铲装位置y1与前端部58最远离斗杆41的作业工具倾卸位置y2之间摆动;动臂缸32,其使动臂31摆动,且在动臂31中的斗杆41向斗杆铲装方向d1摆动时配置在与斗杆41对置的一侧;斗杆缸42,其使斗杆41向斗杆铲装方向d1以及斗杆倾卸方向d2摆动;斗杆铲装限制部64,其限制斗杆缸42的斗杆铲装方向d1的行程s1,使得作业工具51的前端部58的摆动轨道m3与动臂缸32隔开;以及铲
装限制解除部65,其解除斗杆缸42的行程s1的限制,使得在供作业工具51以作业工具倾卸位置y2附近的作业姿势w1配置于接近铲板7a的位置的、动臂31的摆动位置处,斗杆41能够摆动到摆动范围在斗杆铲装方向d1上的末端。
46.根据该结构,由动臂31、斗杆41、作业工具51构成的作业装置4在取使作业工具51的前端部58接近铲板7a的作业位置的情况下,能够使作业工具51的前端部58充分接近铲板7a,且在取其他的作业位置的情况下,能够防止作业工具51与动臂缸32抵接。此外,具备作业工具铲装限制部66,其在铲装限制解除部65解除了行程s1的限制时,限制作业工具51的向作业工具铲装位置y1摆动的方向的摆动。
47.根据该结构,即使解除斗杆铲装限制,也能够避免作业工具51与动臂缸32抵接。此外,具备控制动臂31的摆动的动臂控制部61,在铲装限制解除部65解除了行程s1的限制的状态下,在动臂31从作业工具51的前端部58与铲板7a之间的间隔为最小距离l2时的第一摆动位置y7向第二摆动位置y8上升了给定角度时,动臂控制部61停止动臂31的上升,直到斗杆41返回到不进行斗杆缸42的行程限制的区域。
48.根据该结构,能够防止作业工具51在从第二摆动位置y8向上方的动臂31的摆动区域对动臂缸32干扰。此外,具备控制斗杆41的摆动的斗杆控制部62,在铲装限制解除部65解除了行程s1的限制的状态下,在动臂31从作业工具51的前端部58与铲板7a之间的间隔为最小距离l2时的第一摆动位置y7向第二摆动位置y8上升了给定角度时,斗杆控制部62进行控制使得斗杆41返回到不进行斗杆缸42的行程限制的区域。
49.根据该结构,能够防止作业工具51从第二摆动位置y8向上方的动臂31的摆动区域对动臂缸32干扰。以上,对本发明的一个实施方式进行了说明,但应该认为本次公开的实施方式在所有方面都是例示而不是限制性的。本发明的范围不是由上述说明表示而是由权利要求书表示,意图包含与权利要求书等同的意思以及范围内的全部变更。(标号说明)
50.2 机体7 推土机装置7a 铲板31 动臂32 动臂缸41 斗杆42 斗杆缸51 作业工具57 枢轴58 前端部61 动臂控制部62 斗杆控制部64 斗杆铲装限制部65 铲装限制解除部
66 作业工具铲装限制部d1 斗杆铲装方向d2 斗杆倾卸方向l2 最小距离m3 摆动轨道s1 行程w1 作业姿势y1 作业工具铲装位置y2 作业工具倾卸位置y7 第一摆动位置y8 第二摆动位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1