用于挖掘机的设备和方法与流程
1.本公开涉及一种用于挖掘机的设备和方法。
背景技术:
2.本公开涉及挖掘机的使用中的自动或半自动控制。
3.操作挖掘机需要来自操作员的技能和经验,以便正确执行功能,诸如挖掘平坦表面或对沟渠的精确导向减缓坡度。操作员可以受益于机器辅助控制以便在不放弃完全控制的情况下保持精度。
技术实现要素:
4.提供本概述是为了介绍在下面的详细描述和附图中进一步描述的一些构思。这个概述不旨在标识所附权利要求的关键或必要特征,也不旨在用于帮助确定所附权利要求的范围。
5.一种挖掘机可以包括机架、联接到机架并被配置成将机架支撑在表面上的地面接合机构。挖掘机还可以包括大臂、第一致动器、铲斗小臂、第二致动器、执行机构、第三致动器、至少一个传感器和控制架构。大臂可以枢转地联接到机架。第一致动器可以将大臂和机架互连,其中第一致动器可操作以相对于机架使大臂移动。铲斗小臂可以枢转地联接到大臂,以围绕枢转轴线旋转移动。第二致动器可以将铲斗小臂和大臂互连;并且可操作以相对于大臂围绕枢转轴线使铲斗小臂移动。执行机构可以枢转地联接到铲斗小臂。第三致动器可以将执行机构和铲斗小臂互连,其中第三致动器可操作以相对于铲斗小臂使执行机构移动。传感器可以感测铲斗小臂位置、以及大臂、铲斗小臂和执行机构的移动方向中的一个。控制架构可以包括用户输入界面、具有控制算法的存储介质以及被配置为执行控制算法的控制器。控制算法可以接收目标坡度请求、用户输入界面和存储介质中的一个或多个;从至少一个传感器接收相对于枢转轴线的铲斗小臂位置,其中铲斗小臂位置是在枢转轴线内侧或枢转轴线外侧中的一个;从至少一个传感器接收铲斗小臂相对于枢转轴线的移动方向,其中铲斗小臂的移动方向是从枢转轴线准备离开或准备朝向枢转轴线的方向中的一个;以及当铲斗小臂位置和铲斗小臂的移动方向在自动控制区域内时在自动模式下操作第一致动器以自动调节枢转轴线相对于机架的高度,以自动保持目标坡度。
6.第一致动器在自动模式下的操作模式可以包括当i)铲斗小臂在枢转轴线外侧并且ii)铲斗小臂准备就绪时,向上移动大臂;当i)铲斗小臂在枢转轴线内侧并且ii)铲斗小臂准备离开时,向上移动大臂;当i)铲斗小臂在枢转轴线外侧并且ii)铲斗小臂准备离开时,向下移动大臂;以及当i)铲斗小臂在枢转轴线内侧并且ii)铲斗小臂准备就绪时,向下移动大臂。控制器还可以被配置为当铲斗小臂位置和铲斗小臂的移动方向在自动控制区域外时,停用第一致动器的自动模式。
7.控制架构还可以被配置成当铲斗小臂位置和铲斗小臂的移动方向在自动控制区域内时,执行指令以在自动模式下激活第三致动器以自动卷曲或倾倒执行机构,从而调整
执行机构的切削刃接合表面的角度,自动模式保持目标坡度。这可以包括当铲斗小臂准备就绪时使执行机构倾倒;并且当斗杆准备离开时使执行机构卷曲。铲斗小臂的准备就绪包括第二致动器的伸出。铲斗小臂的准备离开包括第二致动器的缩回。当铲斗小臂位置和铲斗小臂的移动方向在自动控制区域外时,控制器可以进一步停用第三致动器的自动模式。
8.保持目标坡度源于来自全球定位系统和铲斗小臂相对于机架的定位中的一个或多个的反馈。
9.用户输入界面可以包括第一操纵杆和第二操纵杆。第一操纵杆当被向前移动时使铲斗小臂准备离开,并且当第一操纵杆被向后移动时使铲斗小臂准备就绪。当向左移动第二操纵杆时第二操纵杆使执行机构卷曲,当向右移动第二操纵杆时第二操纵杆使执行机构倾倒。
10.本公开还包括一种用于控制挖掘机的方法。该方法包括:基于来自用户输入界面的利用开关进行的用户输入,启用自动模式;从用户输入界面和存储介质中的一个或多个接收目标坡度请求;从至少一个传感器接收相对于枢转轴线的铲斗小臂位置,其中铲斗小臂位置是在枢转轴线内侧或枢转轴线外侧中的一个或多个;从至少一个传感器接收铲斗小臂相对于枢转轴线的移动方向,其中铲斗小臂的移动方向是从枢转轴线准备离开或准备朝向枢转轴线的方向中的一个;以及基于铲斗小臂位置和铲斗小臂的移动方向在自动模式下激活第一致动器以自动调节枢转轴线相对于机架的高度,从而自动保持目标坡度。
11.从下面的详细描述和附图中,这些和其他特征将变得显而易见,其中通过图示的方式示出和描述了各种特征。本公开能够具有其他不同的配置,并且其几个细节能够在各种其他方面进行修改,所有这些都不脱离本公开的范围。因此,详细描述和附图在本质上被认为是说明性的,而不被认为是约束性的或限制性的。
附图说明
12.附图的详细描述参考附图,在附图中:
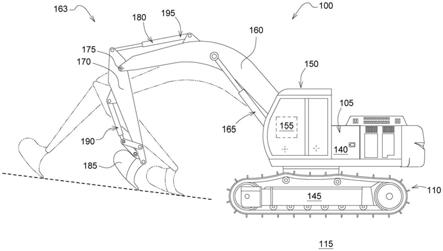
13.图1是其大臂组件处于多个位置的挖掘机的侧视图;
14.图2是图1中示出的实施例的控制架构的示意图;
15.图3是在执行机构接合表面时执行机构保持目标坡度的侧视图;
16.图4a是准备就绪(arming in)的挖掘机的示意图;
17.图4b是准备离开(arming away)的挖掘机的示意图;
18.图5是图2中提到的用户输入界面的示意图;
19.图6是示出了自动控制区域的实施例的挖掘机的俯视图;以及
20.图7是用于操作具有图1中示出的实施例的控制架构的大臂组件和/或执行机构的算法的流程图。
具体实施方式
21.以上附图和以下详细描述中公开的实施例并不旨在穷举或将本公开限制于这些实施例。相反,在不脱离本公开的范围的情况下,可以进行多种变化和修改。
22.如本文所用,除非另有限制或修改,否则具有由连结术语(例如,“和”)分隔开的元件并且前面还有短语“一个或多个”或“至少一个”的元件的列表指示潜在地包括列表的各
个元件或它们的任意组合的构造或布置。例如,“a、b和c中的至少一个”或“a、b和c中的一个或多个”表示仅a、仅b、仅c、或a、b和c中的两个或多个的任意组合(例如,a和b、a和c、b和c、或a、b和c)的可能性。
23.如本文所用,存储介质包括电子存储器、非易失性随机存取存储器、光存储装置、磁存储装置或用于在任何可记录、可重写或可读的电子、光或磁存储介质上存储和访问电子数据的另一装置。
24.如本文所用,术语“控制器”是包括处理器和存储器的计算装置。“控制器”可以是单个装置或者替代性地是多个装置。控制器还可以指任何硬件、软件、固件、电子控制部件、处理逻辑、处理装置(单独地或以任何组合的方式),包括但不限于:专用集成电路(asic)、电子电路、处理器(共享处理器、专用处理器或处理器组)和执行一个或多个软件或固件程序的存储器、组合逻辑电路和/或提供所描述的功能的其他合适部件。
25.如本文所用,位置确定接收器可以包括全球定位系统(gps)接收器或任何卫星导航接收器,用于提供:(1)车辆或其部件(诸如大臂、铲斗小臂和执行机构)的位置数据、高度数据、姿态、侧倾、倾斜偏航、运动数据、加速度数据、速率或速度数据。例如,位置确定接收器可以包括具有辅助接收器或收发机的卫星导航接收器,用于接收差分校正信号以根据所接收的卫星信号校正误差或提高位置数据的精度。
26.图1示出了处于不同位置的挖掘机100的侧视图。挖掘机可以包括机架105、联接到机架105并被配置成将机架105支撑在表面115上的地面接合机构110。一般而言,机架115的上部部分140可以通过摆动枢轴枢转地安装到底盘145上。底盘145可以联接到地面接合机构110,其中地面接合机构110可以包括用于沿着地面移动的一对履带或轮子。机架105可以包括操作员驾驶室150(尽管远程操作挖掘机不需要),在该操作员驾驶室中操作员通过用户输入界面155(还在图5中示出)控制挖掘机100。用户输入界面155可以包括控制杆、控制踏板、按钮和图形显示屏。大臂160可以枢转地联接到机架105。第一致动器165可以将大臂160和机架105互连。第一致动器165可操作以相对于机架105移动大臂160。铲斗小臂170可枢转地联接到大臂160,以便围绕枢转轴线175旋转移动。第二致动器180可以将铲斗小臂170和大臂160互连。第二致动器180可操作以相对于大臂160围绕枢转轴线175移动铲斗小臂170。执行机构185可以枢转地联接到铲斗小臂170。第三致动器190可以将执行机构185和铲斗小臂170互连。第三致动器190可操作以相对于铲斗小臂170移动执行机构185。至少一个传感器195可操作以感测大臂160、铲斗小臂170和执行机构185中的一个或多个的位置(在图2中示例性地示出为铲斗小臂位置230)或移动方向(在图2中示例性地示出为铲斗小臂移动方向235)中的一个或多个。在一个示例中,包括大臂160、铲斗小臂170和执行机构185的大臂组件163可以挖掘用于管道铺设的沟槽,其中沟槽中表面115的均匀性和坡度确保了管道的正确铺设。图1和图3示出了从左向右移动的挖掘机大臂组件,其中执行机构185的切削刃200保持与表面115的恒定接触,以实现目标坡度205(图2中示出)。
27.现在转到图2和图7,挖掘机100可以包括控制架构210,该控制架构包括用户输入界面155、其中存储有控制算法的存储介质125以及被配置为执行控制算法的控制器130。在第一步骤710中,在用户启用自动模式220之后,控制器130可以在下一步骤720中,在接收到满足激活要求215的指令时执行控制算法。激活要求215可以包括操作员启用自动模式220(例如开关、屏幕选择、旋钮)和挖掘机100满足液压、发动机速度等的阈值中的一个或多个。
在一些实施例中,可以不要求操作员通过开关物理地启用自动模式220。自动模式220可以通过满足液压、发动机速度等的阈值要求280来直接启用。阈值要求280可以包括挖掘系统要求,并且还可以包括进入自动控制区域265,这将在下面更详细地描述。控制算法还可以被配置成从用户输入界面155和存储介质125中的一个或多个接收目标坡度请求225;从至少一个传感器195接收相对于枢转轴线175的铲斗小臂位置230,其中铲斗小臂位置230是在枢转轴线175内侧或枢转轴线175外侧中的一个;从至少一个传感器195接收铲斗小臂相对于枢转轴线175的移动方向235,其中铲斗小臂170的移动方向235是从枢转轴线175准备离开240或朝向枢转轴线175准备就绪245中的一个;并且在自动模式220下激活第一致动器165,以基于铲斗小臂位置230和铲斗小臂170的移动方向235自动调节枢转轴线175相对于机架105的高度,以便于自动保持目标坡度205。注意,提及枢转轴线175相对于机架105的高度的情况代表了测量枢转轴线175的相对位置的多种方式。例如,枢转轴线175的高度也可以通过相对于地面表面115或相对于地面接合机构110(仅举几个)的联动运动学来测量。目标坡度205的保持可以来源于来自位置确定接收器135和大臂组件163(或其部件)相对于机架105的定位中的一个或多个的反馈。
28.从用户输入界面155和存储介质125中的一个或多个接收目标坡度请求205可以包括绝对值目标坡度请求250,其中用户输入并建立要建立的目标坡度205;或者替代性地包括程序模式255,在该程序模式下用户根据来自存储介质125的预定输入序列260输入、编程或建立引导程序。预定输入序列260可以包括对应于程序模式255中概述的期望地形的可变目标坡度请求。来自存储介质的预定输入序列260可以是例如一系列目标坡度移动,指定位置内的目标坡度包括x、y和z方向中的一个或多个。目标坡度205可以包括保持枢转轴线175的目标高度、相对于地面115的目标执行机构角度或从位置确定接收器135获取的绝对值中的一个或多个。目标坡度205可以包括一个或多个绝对高度或真实世界高度,其(1)不管原始地形方面的变化(例如,自然变化)如何保持恒定、(2)根据数学关系根据基本线性的坡度、基本弯曲的坡度或倾斜的平坦表面而变化。例如,在挖掘用于管道铺设的沟渠时,可能需要平缓坡度和平坦表面。在另一实例中,可能需要目标坡度来产生基本上倾斜的平坦表面,用于将降雨径流引向水库。在露天开采中,需要一致的地表移除深度。
29.图7是用于操作具有图1中示出的实施例的控制架构210的大臂组件163和/或执行机构185的算法的流程图。参考图3和图4,继续参考图7,在自动模式220下操作第一致动器165可以包括当在步骤730中i)铲斗小臂在枢转轴线405外侧并且ii)铲斗小臂170准备就绪245时,向上移动740大臂160;当在步骤750中i)铲斗小臂在枢转轴线410内侧并且ii)铲斗小臂170准备离开240时,向上移动740大臂160;在步骤760中当i)铲斗小臂在枢转轴线405外侧并且ii)铲斗小臂准备离开240时,向下移动770大臂160;以及在步骤780中当i)铲斗小臂在枢转轴线410内侧并且ii)铲斗小臂准备就绪(在245中)时,向下移动770大臂160。
30.在第一实施例中,操作员通过用户输入界面155控制第二致动器180的移动,并且在进入自动控制区域265时,控制器130通过致动第一致动器165来自动响应移动枢转轴线175,以保持从用户输入界面155或存储介质125导出的目标坡度205。也就是说,操作员在x、y和z方向中的一个或多个方向上在自动控制区域265内移动大臂160和/或执行机构185。机架105的顶部部分也可以相对于地面接合机构围绕z轴线转动。图6是示出了在x
‑
y方向上的预定义自动控制区域265(以虚线示出)的俯视示意图。
31.控制器130还可以被配置为当铲斗小臂位置和铲斗小臂的移动方向在自动控制区域外时停用第一致动器的自动模式220。
32.现在转到图4a,铲斗小臂的准备就绪可以包括伸出第二致动器180,由此准备就绪245通常朝向挖掘机100的机架105移动铲斗小臂170和与其联接的执行机构185。在示例性实施例中,准备就绪245的移动由图4a中示出的箭头指示,并且铲斗小臂175被示出在枢转轴线内侧。这种准备就绪245移动通常可能与挖掘循环相关联。竖直线420是从枢转轴线175到地面115的假想竖直线(由虚线示出)。如前所讨论那样,当在自动控制区域265中时控制枢转轴线175相对于地面115或挖掘机100的机架105的高度,以保持目标坡度205。随着竖直线420横穿,大臂160的移动方向改变方向。
33.现在转到图4b,铲斗小臂170的准备离开240可以包括缩回第二致动器180,由此准备离开240通常背离挖掘机100的机架105移动铲斗小臂170和与其联接的执行机构185。在示例性实施例中,准备离开240的移动由图4b中示出的箭头指示。这种准备离开240移动通常可能与倾倒循环相关联。如前所提及那样,竖直线420是从枢转轴线175到地面115的假想竖直线(由虚线示出)。
34.图3是执行机构185的侧视示意图,展示了x
‑
z方向上的预定义自动控制区域265。控制架构210还可以被配置成执行指令以在自动模式220下激活第三致动器190,以当铲斗小臂170位置和铲斗小臂170的移动方向199在自动控制区域265内时,自动卷曲270(由箭头示出)或倾倒275(由箭头示出)执行机构185,以调节执行机构的切削刃200与表面115接合的角度α(如图3所示),其中自动模式220保持目标坡度205。卷曲270和倾倒275可以围绕执行机构枢转轴线315进行。对切削刃200的角度的这种控制进一步提高了实现目标坡度205的、超过枢转轴线175仅执行机构高度的精度。如果切削刃200进入或停留在上阈值305和下阈值310之间的区域,则执行机构185的角度α可以激活。自动控制区域265的上阈值305驻留在目标坡度205之上。下自动控制区域265的下阈值310驻留在目标坡度205之下。在所描绘的实施例中,自动控制区域265的上阈值305和下阈值310相对于目标坡度205可以具有相同的高度。在其他实施例中,自动控制区域265的上阈值305和下阈值310相对于目标坡度205可以具有不同的高度。
35.第三致动器190在自动模式220下的操作可以包括当铲斗小臂170准备就绪245时使执行机构185倾倒275,以及当铲斗小臂170准备离开240时使执行机构270卷曲。
36.控制器还可以被配置成当铲斗小臂位置230和铲斗小臂170的移动方向235在自动控制区域265外时,停用第三致动器190的自动模式。
37.现在转到图5,示出了挖掘机100的用户输入界面155的第一实施例。用户输入界面155可以包括第一操纵杆505和第二操纵杆510。在操作员的左侧的第一操纵杆505在被向前移动时可以使铲斗小臂170准备离开240,并且在被向后移动时可以使铲斗小臂准备就绪245。在操作员的右侧的第二操纵杆510在向左移动第二操纵杆510时使执行机构185卷曲270,并且在向右移动第二操纵杆510时可以使执行机构185倾倒275。当第二操纵杆向前移动时,第二操纵杆510还使大臂160向上移动,并且当第二操纵杆向后移动时,使大臂160向下移动。当使用以上提及的控制架构210时,大臂组件163的控制变得简化,其中当进入自动控制区域265时,第二操纵杆510的功能的手动控制变得自动化。
38.本文使用的术语是为了描述特定的实施例或实施方式的目的,而不是旨在限制本
公开。如本文所用,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文清楚地另外指出。将进一步理解的是,在本说明书中,术语“具有(has、have、having)”、“包括(include、includes、including)”、“包含(comprise、comprises、comprising)”等的任何使用标识所陈述的特征、整数、步骤、操作、元件和/或部件的存在,但不排除一个或多个其他特征、整数、步骤、操作、元件、部件和/或它们的组的存在或添加。
39.当描述一个设备的多种实施方式时,在此与附图标记一起使用的附图标记“a”和“b”仅仅是为了说明。
40.本文讨论的任何方法、过程或系统中的步骤或操作中的一个或多个可以被省略、重复或重新排序,并且在本公开的范围内。
41.虽然以上描述了本公开的示例实施例,但是这些描述不应以约束性或限制性的的含义来看待。相反,在不脱离所附权利要求的范围的情况下,可以进行多种变化和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1