一种挖掘机智能施工引导系统及方法
1.本发明属于挖掘机控制技术领域,具体来说,涉及一种挖掘机定位、铲斗位姿检测、施工区域高程、坡度、开挖方量等重要参数检测方法,广泛应用于挖掘机智能化施工中。
背景技术:
2.挖掘机是最常用的工程机械之一,它在施工过程中的主要用途是挖掘、平地和修坡作业。驾驶员凭经验来操作铲斗进行挖掘、平地或修坡作业,以达到设计的高度或坡度,效率低且精确度不高。如若实时获得铲尖基于车身坐标系的坐标,基于该坐标给驾驶员作业引导可大大提高作业效率和精度。因此,挖掘机铲斗定位成为了一个研究热点,从各方文献以及工程现场调研结果来看,现有的铲斗定位方法可定位车辆和铲斗的坐标,可以通过铲斗的z坐标获得作业面的高度信息,但不能获得坡度信息,引导信息有限;并且可视化时,只显示挖掘轨迹、设计高程、当前高程、车速等信息,没有施工区域三维地形图,不能统计施工量等信息,信息可视化不够全面。
技术实现要素:
3.本发明要解决的技术问题是,提出一种挖掘机智能施工引导系统及方法,主要解决现有挖掘机铲斗坐标测量系统不具备测量斜面坡度的功能,以及可视化时不能导入三维地形图,不能实时统计开挖方量、待挖方量等信息,可视化内容不够丰富,对驾驶员的作业引导不够充分、准确的缺点。
4.为解决上述技术问题,本发明采用如下技术方案:
5.一种挖掘机智能施工引导方法,其特征在于在车辆驾驶室顶部安装两个gps天线,主天线在后,副天线在前,其中航向角为主副天线的边线与正北方向的夹角;
6.挖掘机车身、动臂、斗杆、铲斗铰链上分别安装高精度动态倾角传感器,车身动态倾角传感器用于检测车身俯仰和横滚角度,动臂动态倾角传感器用于检测动臂的倾角,斗杆动态倾角传感器用于检测斗杆绕轴的倾角;铲斗动态倾角传感器分别用于检测动臂、斗杆、铲斗的倾角;
7.微型计算机按设定频率读取gps系统和高精度动态倾角传感器的数据并进行运算处理,并将计算得到的挖掘机坐标、铲尖坐标和姿态信息进行显示,并且在三维地形图上实时显示挖掘机作业轨迹图像、已挖方量、待挖方量、当前挖掘深度、目标挖掘深度、当前坡度、目标坡度信息。
8.进一步的,两个gps天线设置为通过直接读取gps信息以获得主天线经度、纬度、高程、航向角信息。
9.进一步的,当前挖掘深度用铲尖z坐标获得。
10.进一步的,当前坡度信息通过铲背测量,包括如下步骤:
11.s1:以gps主天线支点o0、动臂支点o1、斗杆支点o2、铲斗支点o3、铲尖正中央处o4为中心,分别建立五个坐标系;gps主天线坐标系的主天线支点o0位于车身上;
12.s2:测量动臂支点o1在gps主天线坐标系中的位置x
d
、y
d
、z
d
;
13.s3:测量动臂长度l1,斗杆长度l2,铲斗长度l3的值;
14.s4:读取车身倾角传感器as0的值,经处理后,得到车身俯仰θ
fb
和横滚角度或左右倾斜角度θ
lr
;
15.s5:读取动臂上倾角传感器as1的值,经处理后得到动臂上倾角θ1;
16.s6:读取斗杆上倾角传感器as2的值,再根据动臂上倾角θ1,经处理后得到斗杆上倾角θ2;
17.s7:读取铲斗倾角传感器as3的值,再根据斗杆上倾角传感器as2的值,经处理后得到铲斗倾角θ3;
18.s8:将以上测量所获得的x
d
、y
d
、z
d
、l1,l2,l3、θ
fb
、θ
lr
、θ1、θ2、θ3的值代入改进后的d
‑
h算法,可得到基于gps主天线坐标系的铲尖坐标x,y,z和铲尖姿态角ξ,ξ是铲斗与斗杆铰接点与铲斗斗齿尖连线与水平线的夹角;
19.改进的d
‑
h算法公式如下:
20.车辆坐标系:
21.x
veh
=x
d
22.y
veh
=y
d
+cos(l1cos(θ1+θ
fb
)+l2cos(θ
1+
θ2+θ
fb
)+l3cos(θ1+θ2+θ3+θ
fb
))
23.z
veh
=z
d
+sin(l1cos(θ1+θ
fb
)+l2sin(θ
1+
θ2+θ
fb
)+l3sin(θ1+θ2+θ3+θ
fb
))
24.基于车身gps的坐标系:
[0025][0026][0027]
这里r是应用欧拉公式获得的旋转矩阵,其中θ
fb
是车身的俯仰角,θ
lr
是车身的横滚角,由车身传感器获得,θ0是车身与正北方向的夹角,由gps获得。
[0028]
s9:根据铲尖姿态角ξ,经下式几何运算处理后,可得到铲背姿态角α3;将铲背紧贴在坡面上,利用铲背姿态角α3来测量坡度,实现铲背测坡功能:
[0029]
ξ=θ1+θ2+θ3[0030]
α3=180
‑
ξ
‑
α2[0031]
其中α2为铲斗与斗杆铰接点与铲斗斗齿尖连线与铲背面之间的夹角。
[0032]
进一步的,挖掘作业时,驾驶员将铲尖放在作业面获得当前挖掘深度、以及与设计挖掘目标深度的偏差值,在操作挖掘机挖掘时实时了解铲尖坐标与设计挖掘目标的偏差。
[0033]
进一步的,修坡作业时,驾驶员将铲背紧贴在作业坡面上获得当时坡度值、以及与设计坡度的偏差,从而引导驾驶员作业。
[0034]
进一步的,在显示挖掘机作业图像的同时,通过数据窗口显示挖掘机当前位置、高程、θ
fb
、θ
lr
、θ1、θ2、θ3、铲尖坐标x,y,z、铲尖姿态角ξ、铲背姿态角α3、设计作业目标、当前作业与设计作业目标偏差信息,给挖掘机驾驶员以作业引导。
[0035]
一种挖掘机智能施工引导系统,其特征在于:
[0036]
挖掘机上安装gps系统,用于挖掘机车身定位和航向角检测;
[0037]
挖掘机车身、动臂、斗杆、铲斗铰链上分别安装高精度动态倾角传感器,车身动态倾角传感器用于检测车身俯仰和横滚角度,动臂动态倾角传感器用于检测动臂的倾角,斗杆动态倾角传感器用于检测斗杆绕轴的倾角;铲斗动态倾角传感器分别用于检测动臂、斗杆、铲斗的倾角;
[0038]
微型计算机按设定频率读取gps系统和高精度动态倾角传感器的数据并进行运算处理,并将计算得到的挖掘机坐标、铲尖坐标和姿态信息进行显示,并且在三维地形图上实时显示挖掘机作业轨迹图像、已挖方量、待挖方量、当前挖掘深度、目标挖掘深度、当前坡度、目标坡度信息。
[0039]
进一步的,在车辆驾驶室顶部安装两个gps天线,主天线在后,副天线在前;读取的gps信息中航向角为主副天线的边线与正北方向的夹角。
[0040]
综上,本发明设计一种挖掘机智能施工引导系统和方法,结合三维地形图,显示铲背测坡信息和gps读取信息,实时显示包括挖掘机作业动作轨迹、挖掘面三维图像、已挖掘方量、待挖方量信息在内的挖掘机作业图像,实现挖掘作业可视化。能实时检测并显示挖掘机铲斗位姿、作业区域高程、坡度、开挖方量等重要参数,以及与设计目标的差值等信息,实时引导挖掘机驾驶员进行作业,在提高施工效率和质量的同时,减轻了技术人员的工作量。
[0041]
与现有的挖掘机铲尖坐标测量系统相比,本发明具有独特的铲背测坡功能,并且图形化显示的内容更加丰富多样,能够为驾驶员作业提供更全面的引导。
附图说明
[0042]
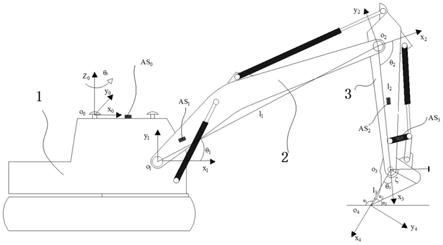
图1是本发明实施例提供的挖掘机智能施工引导系统的结构示意图。
[0043]
图2是本发明的可视化界面显示布局图。
具体实施方式
[0044]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0045]
如图1所示是本发明实施例提供的挖掘机智能施工引导系统的结构示意图。
[0046]
挖掘机上安装gps系统,用于挖掘机车身定位和航向角检测。挖掘机车身1、动臂2、斗杆3、铲斗铰链上分别安装四个高精度动态倾角传感器as0~as3,如图1所示。车身倾角传感器as0用于检测车身俯仰和横滚角度。动臂上倾角传感器as1用于检测动臂的倾角,斗杆上倾角传感器as2用于检测斗杆绕轴的倾角、铲斗倾角传感器as3分别用于检测动臂、斗杆、铲斗的倾角。将gps和四个高精度动态倾角传感器接到微型计算机上,微型计算机按一定频率读取它们的数据,并进行运算处理,并将计算得到的挖掘机坐标、铲尖坐标和姿态信息进行显示,并且在三维地形图上实时显示挖掘机作业轨迹图像、已挖方量、待挖方量、当前挖掘深度、目标挖掘深度、当前坡度、目标坡度等信息。其中当前挖掘深度用铲尖z坐标获得,由于本系统开发了铲背测坡功能,可直接通过铲背测量当前坡度信息。
[0047]
具体的挖掘引导方法如下:
[0048]
1.车辆位置及航向角
[0049]
在车辆驾驶室顶部安装两个gps天线,主天线在后,副天线在前。直接读取gps信息,可获得主天线经度、纬度、高程、航向角信息,其中航向角为主副天线的边线与正北方向的夹角。
[0050]
2.铲尖坐标及姿态
[0051]
第一步:在gps主天线o0、动臂支点o1、斗杆支点o2、铲斗支点o3、铲尖正中央处o4分别建立五个坐标系,如图1所示;
[0052]
第二步:测量动臂支点o1在gps主天线坐标系中的x
d
、y
d
、z
d
;
[0053]
第二步:测量l1,l2,l3的值;
[0054]
第三步:读到车身倾角传感器as0的值,经处理后,得到车身俯仰θ
fb
和横滚(左右倾斜)角度θ
lr
;
[0055]
第四步:读取动臂上倾角传感器as1的值,经处理后得到θ1;
[0056]
第五步:读取斗杆上倾角传感器as2的值,再根据θ1,经处理后得到θ2;
[0057]
第六步:读取铲斗倾角传感器as3的值,再根据斗杆上倾角传感器as2的值,经处理后得到θ3;
[0058]
第七步:将以上测量所获得的x
d
、y
d
、z
d
、l1,l2,l3、θ
fb
、θ
lr
、θ1、θ2、θ3的值代入改进后的d
‑
h算法,可得到基于gps主天线坐标系的铲尖坐标x,y,z和铲尖姿态角ξ。
[0059]
第八步:根据铲尖姿态角ξ,经几何运算处理后,可得到铲背姿态角α3;可利用铲背姿态角α3来测量坡度,只需要将铲背紧贴在坡面上,就可以获得坡度,实现铲背测坡功能。
[0060]
3.可视化
[0061]
结合三维地形图,将以上数据信息显示,实时显示挖掘机作业动作轨迹、挖掘面三维图像、已挖掘方量、待挖方量等信息,实现挖掘作业可视化,如图2所示。
[0062]
在显示挖掘机作业图像的同时,通过数据窗口显示挖掘机当前位置、高程、θ
fb
、θ
lr
、θ1、θ2、θ3、铲尖坐标x,y,z、铲尖姿态角ξ、铲背姿态角α3、设计作业目标、当前作业与设计作业目标偏差等信息,给挖掘机驾驶员以作业引导。如挖掘作业时,驾驶员只需将铲尖放在作业面就可获得当前挖掘深度,以及与设计挖掘目标深度的偏差值,在操作挖掘机挖掘时实时了解铲尖坐标与设计挖掘目标的偏差;如修坡作业时,驾驶员只需将铲背紧贴在作业坡面上,就可获得当时坡度值,以及与设计坡度的偏差,从而引导驾驶员作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1