一种沉井壁行挖掘机自动控制装置和方法与流程
1.本发明涉及一种沉井壁行挖掘机自动控制装置和方法,应用于土木工程中地下结构及基础工程领域。
背景技术:
2.挖掘机常用于沉井掘进中,目前人工控制挖掘机的动作,难以实现沉井均匀对称挖掘,易造成沉井偏斜。同时采用遥控壁行挖掘机时,沉井深度达到30米以上,地面遥控人员难以直接观测壁行挖掘机的状态。为了实现沉井均匀对称挖掘,降低操作人员的主观因素干扰,实现挖掘机沉井内自动均匀挖掘和自动超挖纠偏,能够提高沉井的下沉精度,降低人为因素干扰有重要意义。
技术实现要素:
3.有鉴于此,本发明实施例提供一种沉井壁行挖掘机自动控制装置和方法,能够实现壁行挖掘机在井下自动定位、挖掘和纠偏。
4.为达到上述目的,本发明所采取的方案为:一种沉井壁行挖掘机的自动控制装置,包括环向导轨和挖掘主机,挖掘主机在环向导轨上移动,特征在于,包括定位器和控制单元;定位器包括rfid应答器和识别器;rfid应答器均布于环向导轨上;识别器安装在挖掘主机上,能够读取rfid应答器的编号;控制单元能够分析识别器信息,确定挖掘主机的位置。
5.进一步的,环向导轨包括导轨座和防护罩,其特征在于,rfid应答器安装在导轨座或防护罩上。
6.进一步的,挖掘主机包括环移平车,其特征在于,识别器安装在环移平车上,将rfid应答器信号传输给控制单元。
7.进一步的,挖掘主机还包括弱电箱,其特征在于,识别器安装在弱电箱内,环移平车靠近环向导轨一侧安装有rfid天线,识别器通过rfid天线读取不同位置的rfid应答器信号。
8.进一步的,沉井内部有偶数个挖掘扇区,rfid应答器安装在每个挖掘扇区对应的环向导轨位置。
9.进一步的,挖掘主机还包括挖掘臂,挖掘臂上安装有油缸,其特征在于,安装有位移传感器,通过电缆将信号输入控制单元,控制单元通过位移传感器信号判断并调整挖掘臂姿态。
10.进一步的,控制单元控制挖掘主机按对称两扇区依次挖掘或间隔挖掘或按间隔扇区顺次挖掘的方式进行挖掘。
11.进一步的,挖掘扇区被控制单元划分为偶数个组,挖掘主机依次挖掘组内扇区后,在挖掘对称组内扇区。
12.进一步的,控制装置预留有人工操作手柄。
13.一种沉井壁行挖掘机的自动控制方法,包括如下步骤:
(s1)输入扇区信息:根据沉井直径和挖掘主机尺寸参数,将沉井内部均布划分为对称的扇区,并将扇区数量和每个扇区对应rfid应答器的编号输入控制单元;(s2)判定挖掘状态:控制单元根据沉井测斜参数,判断挖掘主机的状态是正常挖状态掘或纠偏挖掘状态;正常挖掘时,控制单元按照对称扇区或对称扇区组依次进行挖掘;纠偏挖掘时,控制单元能够自动在下沉较慢扇区增加挖掘次数或速度;(s3)移动壁行挖掘机:控制单元控制辅助装置和挖掘主机行走至所需挖掘的扇区,同时控制辅助装置所提吊的管线与井壁一同下放;(s4)完成挖掘动作:设定挖斗的挖掘深度,控制单元根据位移传感器的数据生成挖斗的挖掘轨迹,根据挖斗挖掘轨迹控制液压阀组中的比例阀或伺服阀使位移传感器的信号符合对应时程挖掘轨迹的挖掘臂姿态,直至完成一次挖掘动作。
14.本发明的优点和积极效果是能够实现沉井均匀对称挖掘,降低操作人员的主观因素干扰,实现挖掘机沉井内自动均匀挖掘和自动超挖纠偏,能够提高沉井的下沉精度,降低人为因素干扰有重要意义。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
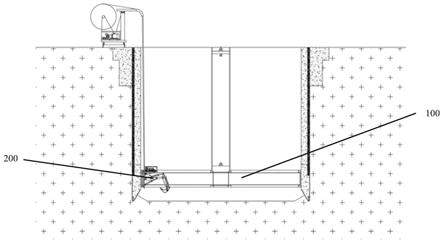
16.图1为本发明实施例整体结构示意图;图2为本发明实施例环向导轨结构示意图;图3为本发明实施例壁行挖掘机结构示意图;图4为本发明实施例具体实施流程示意图。
17.图中,100
‑
环向导轨;200
‑
挖掘主机;101
‑
导轨座;102
‑
rfid应答器;103
‑
防护罩;201
‑
弱电箱;202
‑
识别器;203
‑
环移平车;204
‑
rfid天线;205
‑
挖掘臂;206
‑
油缸。
具体实施方式
18.以下参照附图及具体实施方式对本发明作进一步说明。
19.如图1
‑
4所示,一种沉井壁行挖掘机的自动控制装置,包括环向导轨(100)和挖掘主机(200),挖掘主机(200)在环向导轨(100)上移动,特征在于,包括定位器和控制单元;定位器包括rfid应答器(102)和识别器(202);rfid应答器(102)均布于环向导轨(100)上;识别器(202)安装在挖掘主机(200)上,能够读取rfid应答器(102)的编号;控制单元能够分析识别器(202)信息,确定挖掘主机(200)的位置。
20.优选地,环向导轨(100)包括导轨座(101)和防护罩(103),其特征在于,rfid应答器(102)安装在导轨座(101)或防护罩(103)上。
21.优选地,挖掘主机(200)包括环移平车(203),其特征在于,识别器(202)安装在环移平车(203)上,将rfid应答器(102)信号传输给控制单元。
22.优选地,挖掘主机(200)还包括弱电箱(201),其特征在于,识别器(202)安装在弱电箱(201)内,环移平车(203)靠近环向导轨(100)一侧安装有rfid天线(204),识别器(202)
通过rfid天线(204)读取不同位置的rfid应答器(102)信号。
23.优选地,沉井内部有偶数个挖掘扇区,rfid应答器(102)安装在每个挖掘扇区对应的环向导轨(100)位置。
24.优选地,挖掘主机(200)还包括挖掘臂(205),挖掘臂(205)上安装有油缸(206),其特征在于,安装有位移传感器,通过电缆将信号输入控制单元,控制单元通过位移传感器信号判断并调整挖掘臂(205)姿态。
25.优选地,控制单元控制挖掘主机(200)按对称两扇区依次挖掘或间隔挖掘或按间隔扇区顺次挖掘的方式进行挖掘。
26.优选地,挖掘扇区被控制单元划分为偶数个组,挖掘主机(200)依次挖掘组内扇区后,在挖掘对称组内扇区。
27.优选地,控制装置预留有人工操作手柄。
28.一种沉井壁行挖掘机的自动控制方法,包括如下步骤:(s1)输入扇区信息:根据沉井直径和挖掘主机(200)尺寸参数,将沉井内部均布划分为对称的扇区,并将扇区数量和每个扇区对应rfid应答器(102)的编号输入控制单元;(s2)判定挖掘状态:控制单元根据沉井测斜参数,判断挖掘主机(200)的状态是正常挖状态掘或纠偏挖掘状态;正常挖掘时,控制单元按照对称扇区或对称扇区组依次进行挖掘;纠偏挖掘时,控制单元能够自动在下沉较慢扇区增加挖掘次数或速度;(s3)移动壁行挖掘机:控制单元控制辅助装置和挖掘主机(200)行走至所需挖掘的扇区,同时控制辅助装置所提吊的管线与井壁一同下放;(s4)完成挖掘动作:设定挖斗的挖掘深度,控制单元根据位移传感器的数据生成挖斗的挖掘轨迹,根据挖斗挖掘轨迹控制液压阀组中的比例阀或伺服阀使位移传感器的信号符合对应时程挖掘轨迹的挖掘臂(205)姿态,直至完成一次挖掘动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1