排水箱涵自动冲洗系统的制作方法
1.本发明属于市政排水领域,具体涉及一种排水箱涵自动冲洗系统。
背景技术:
2.排水箱涵广泛应用于市政排水领域,经过常年累月的使用,绝大多数排水箱涵底部都会淤积有厚度不等的淤泥,尤其是在一些没有完全实现雨污分流排水体制的区域,排水箱涵中常年会有污水排放,而污水中往往伴随有大量固体沉积物沉积在箱涵内部。
3.对于排水箱涵内的淤泥,由于没有形成定期的清理机制,淤泥会逐渐硬化板结,增加了冲洗难度。另外,由于缺乏成熟有效的冲洗设备,常规清洗方式仍然是以人工清洗为主,辅以简单的设备,需要大量的人力作业,而且构筑物内的环境条件十分恶劣,对作业人员的人身安全也带来了具大的威胁。
技术实现要素:
4.本发明的目的是提供一种排水箱涵自动冲洗系统,该系统能对排水箱涵进行全线冲洗,无需人工进入排水箱涵内,操作安全、强度低,冲洗时供水供电有保障,清洗效果好。
5.本发明所采用的技术方案是:
6.一种排水箱涵自动冲洗系统,包括排水箱涵、冲洗小车和供电轨;排水箱涵内上部为行车区且设有水平板、下部通过纵向墙分为排水区和储水区,储水区内通过横隔墙分段;冲洗小车包括用于在行车区内沿水平板行走的电动小车,电动小车上设有加压泵和摄像头,加压泵的进水管连接至吸水软管、出水管连接至喷头,吸水软管自然落入储水区内,喷头指向排水区底面,摄像头配合有射灯且用于分别观察排水区底面情况和吸水软管下部形态;供电轨安装在行车区且用于为电动小车的行走电机、加压泵、摄像头和射灯供电。
7.优选地,出水管连接有多个喷头,每个喷头均能喷射扇形射流且均在竖直方向上与排水区底面呈45
°
。
8.进一步地,出水管连接有三个喷头,三个喷头沿排水箱涵走向等高排列且靠近纵向墙,最上游的喷头与排水箱涵走向呈45
°
且偏离纵向墙,中间的喷头与排水箱涵走向呈22.5
°
且偏离纵向墙,最下游的喷头与排水箱涵走向平行。
9.优选地,电动小车上设有限位滑轮,限位滑轮分布在排水箱涵两边且分别与两边侧壁滚动接触。
10.优选地,电动小车的车体固连有辅助架,车体行走在水平板上,辅助架横跨在排水区上方且通过支撑滑轮滚动支撑在纵向墙顶面,加压泵和行走电机安装在车体上,进水管、出水管、摄像头和射灯安装在辅助架上。
11.进一步地,进水管和出水管通过沿线的支座稳固安装在辅助架上。
12.优选地,供电轨包括安装在排水箱涵内壁上的防护罩、通过绝缘体安装在防护罩内的接触轨和安装在电动小车上的集电机构,集电机构伸入防护罩与接触轨接触。
13.优选地,排水箱涵纵坡为0.005,排水区净宽3.0m、储水区净宽0.4m,水平板底距排
水箱涵内底壁3.0m、水平板顶距排水箱涵内顶壁1.5m、水平板宽1.5m,储水区每段长200m,横隔墙高1.4m,自然状态下吸水软管管口距排水箱涵内底壁0.2m。
14.优选地,工作时,行走小车匀速行走,行走速度为0~10km/h,加压泵的流量为240m3/h、扬程为0.50mpa。
15.优选地,摄像头能远程调节角度。
16.本发明的有益效果是:
17.该系统能对排水箱涵进行全线冲洗,无需人工进入排水箱涵内,操作安全、强度低,冲洗时供水供电有保障,清洗效果好。
附图说明
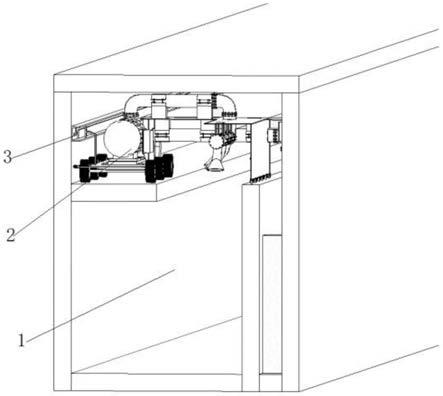
18.图1是本发明实施例中排水箱涵自动冲洗系统的结构示意图。
19.图2是本发明实施例中排水箱涵的结构示意图。
20.图3是本发明实施例中冲洗小车的结构示意图一。
21.图4是本发明实施例中冲洗小车的结构示意图二。
22.图5是本发明实施例中冲洗小车的结构示意图三。
23.图6是本发明实施例中供电轨的工作示意图。
24.图中:
25.1.排水箱涵;1
‑
1.排水区;1
‑
2.行车区;1
‑
3.储水区;1
‑
4.水平板;1
‑
5.纵向墙;1
‑
6.横隔墙。
26.2.冲洗小车;2
‑
1.电动小车;2
‑
2.加压泵;2
‑
3.行走电机;2
‑
4.进水管;2
‑
5.吸水软管;2
‑
6.出水管;2
‑
7.喷头;2
‑
8.辅助架;2
‑
9.支座;2
‑
10.限位滑轮;2
‑
11.摄像头;2
‑
12.支撑滑轮。
27.3.供电轨;3
‑
1.防护罩;3
‑
2.绝缘体;3
‑
3.接触轨;3
‑
4.集电机构。
具体实施方式
28.下面结合附图和实施例对本发明作进一步的说明。
29.如图1至图6所示,一种排水箱涵自动冲洗系统,包括排水箱涵1、冲洗小车2和供电轨3;排水箱涵1内上部为行车区1
‑
2且设有水平板1
‑
4、下部通过纵向墙1
‑
5分为排水区1
‑
1和储水区1
‑
3,储水区1
‑
3内通过横隔墙1
‑
6分段;冲洗小车2包括用于在行车区1
‑
2内沿水平板1
‑
4行走的电动小车2
‑
1,电动小车2
‑
1上设有加压泵2
‑
2和摄像头2
‑
11,加压泵2
‑
2的进水管2
‑
4连接至吸水软管2
‑
5、出水管2
‑
6连接至喷头2
‑
7,吸水软管2
‑
5自然落入储水区1
‑
3内,喷头2
‑
7指向排水区1
‑
1底面,摄像头2
‑
11配合有射灯且用于分别观察排水区1
‑
1底面情况和吸水软管2
‑
5下部形态;供电轨3安装在行车区1
‑
2且用于为电动小车2
‑
1的行走电机2
‑
3、加压泵2
‑
2、摄像头2
‑
11和射灯供电。
30.如图3和图5所示,在本实施例中,出水管2
‑
6连接有多个喷头2
‑
7,每个喷头2
‑
7均能喷射扇形射流且均在竖直方向上与排水区1
‑
1底面呈45
°
,该设置确保了冲洗效果。在本实施例中,出水管2
‑
6连接有三个喷头2
‑
7,三个喷头2
‑
7沿排水箱涵1走向等高排列且靠近纵向墙1
‑
5,最上游的喷头2
‑
7与排水箱涵1走向呈45
°
且偏离纵向墙1
‑
5,中间的喷头2
‑
7与排水箱涵1走向呈22.5
°
且偏离纵向墙1
‑
5,最下游的喷头2
‑
7与排水箱涵1走向平行,该设置
在完成冲洗全覆盖的基础上,尽量减少了喷头2
‑
7个数。
31.如图3至图5所示,在本实施例中,电动小车2
‑
1上设有限位滑轮2
‑
10,限位滑轮2
‑
10分布在排水箱涵1两边且分别与两边侧壁滚动接触,限位滑轮2
‑
10可以保证电动小车2
‑
1不横向偏移。
32.如图3至图5所示,在本实施例中,电动小车2
‑
1的车体固连有辅助架2
‑
8,车体行走在水平板1
‑
4上,辅助架2
‑
8横跨在排水区1
‑
1上方且通过支撑滑轮2
‑
12滚动支撑在纵向墙1
‑
5顶面,加压泵2
‑
2和行走电机2
‑
3安装在车体上,进水管2
‑
4、出水管2
‑
6、摄像头2
‑
11和射灯安装在辅助架2
‑
8上。辅助架2
‑
8可以提高电动小车2
‑
1行走时的整体稳定性,而且避免了进水管2
‑
4、出水管2
‑
6、摄像头2
‑
11和射灯悬空安装。
33.如图3至图5所示,在本实施例中,进水管2
‑
4和出水管2
‑
6通过沿线的支座2
‑
9稳固安装在辅助架2
‑
8上。进水管2
‑
4和出水管2
‑
6由流体冲击较大,沿线设置支座2
‑
9,提高稳定性。
34.如图6所示,在本实施例中,供电轨3包括安装在排水箱涵1内壁上的防护罩3
‑
1、通过绝缘体3
‑
2安装在防护罩3
‑
1内的接触轨3
‑
3和安装在电动小车2
‑
1上的集电机构3
‑
4,集电机构3
‑
4伸入防护罩3
‑
1与接触轨3
‑
3接触。供电轨3为成熟机构,采用常规安装。
35.采用两个摄像头2
‑
11对好角度即可对各自的目标情况进行有效观察,不过最好还能远程调节角度,这样可以顺带检查其它目标情况。
36.关于具体尺寸及工作参数,以下为实施例:
37.排水箱涵1纵坡为0.005,排水区1
‑
1净宽3.0m、储水区1
‑
3净宽0.4m,水平板1
‑
4底距排水箱涵1内底壁3.0m、水平板1
‑
4顶距排水箱涵1内顶壁1.5m、水平板1
‑
4宽1.5m,储水区1
‑
3每段长200m,横隔墙1
‑
6高1.4m,自然状态下吸水软管2
‑
5管口距排水箱涵1内底壁0.2m;
38.工作时,行走小车2
‑
1匀速行走,行走速度为0~10km/h,加压泵2
‑
2的流量为240m3/h、扬程为0.50mpa;
39.进水管2
‑
4和出水管2
‑
6均采用不锈钢管、吸水软管2
‑
5采用橡胶管,进水管2
‑
4、出水管2
‑
6和吸水软管2
‑
5的管径均为dn200,出水管2
‑
6末段水平且通过法兰盘封堵,出水管2
‑
6末段距纵向墙1
‑
5为0.3m、高于水平板1
‑
4顶0.6m,出水管2
‑
6末段长2.0m,喷头2
‑
7通过管径为dn80的接口安装在出水管2
‑
7末段沿线下侧,喷头2
‑
7喷口高于水平板1
‑
4顶0.2m。
40.工作时,冲洗步骤如下:
41.s1、冲洗前,往储水区1
‑
3最上游注入清水,注满一段储水区1
‑
3后清水会漫过横隔墙1
‑
6溢流至下一段储水区1
‑
3,直至储水区1
‑
3全注满;
42.s2、供电轨3开始通电,控制冲洗小车2移动至排水箱涵1最上游,室外人员通过摄像头2
‑
11实时监控吸水软管2
‑
5下部形态,保证吸水软管2
‑
5自然落入储水区1
‑
3液面以下;
43.s3、同时启动加压泵2
‑
2和行走电机2
‑
3,行走电机2
‑
3带动冲洗小车2前进,加压泵2
‑
2将储水区1
‑
3内的清水通过吸水软管2
‑
5和进水管2
‑
4抽入并加压后通过出水管2
‑
6输送至喷头2
‑
7喷出,冲洗小车2边前进边对排水区1
‑
1底面淤泥进行冲洗,室外人员通过摄像头2
‑
11实时监控排水区1
‑
1底面冲洗效果,根据冲洗情况远程调整冲洗小车2的移动速度;
44.s4、随着冲洗小车2往下游移动,室外人员通过摄像头2
‑
11实时监控吸水软管2
‑
5下部形态,当吸水软管2
‑
5要通过横隔墙1
‑
6时,关闭加压泵2
‑
2,并继续控制冲洗小车2往下游移动;
45.s5、室外人员通过摄像头2
‑
11实时监控吸水软管2
‑
5下部形态,当发现吸水软管2
‑
5跨过横隔墙1
‑
6进入下一段储水区1
‑
3且吸水软管2
‑
5自然落入储水区1
‑
3液面以下时,控制冲洗小车2反向移动,直至吸水软管2
‑
5回到横隔墙1
‑
6位置,控制冲洗小车2停止移动,然后重复步骤s3;
46.s6、依据步骤s3至s5,直至排水区1
‑
1全线冲洗完毕。
47.该系统能对排水箱涵1进行全线冲洗,无需人工进入排水箱涵1内,操作安全、强度低,冲洗时供水供电有保障,清洗效果好。
48.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1