一种机械手及其基桩静载试验压重系统的制作方法
1.本发明涉及基桩静载试验技术,特别是涉及一种机械手及其基桩静载试验压重系统。
背景技术:
2.多年来大量的基本建设项目均采用了桩基础,在《建筑基桩检测技术规范》jgj106
‑
2014;《水运工程地基基础试验检测技术规程》jts237
‑
2017;《地基基础设计标准》dgj08
‑
11
‑
2018;《建筑地基与基桩检测技术规程》dg/tj08
‑
218
‑
2017;《公路工程基桩检测技术规程》jtg/t 3512
‑
2020等规范中均规定需静载荷试验验收基桩承载力,静载荷试验过程中需要搭设压重反力装置,搭设过程中需要大型起重机、挂钩及摆放人员,摆放人员需要人工将安装在起重机上的挂钩将压块、钢梁钩合,然后利用起重机起吊至指定位置,再通过人工辅助进行堆放,以搭建基桩静载试验压重结构。这种方式使得人员作业工作量大、安全风险高,起重机对场地要求高,特别是起吊过程中,由于需要人工辅助,加上起吊时采用钢丝绳柔性起吊,很容易造成重物晃动,严重威胁了工作人员的安全。
3.对此,申请人提出了一种基桩静载试验压重系统,其能够利用机械手准确抓取压块、钢梁,并进行移动、堆放,从而降低整个过程中人工的直接参与度,提高安全性。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是提供一种机械手及其基桩静载试验压重系统。
5.为实现上述目的,本发明提供了一种机械手,包括旋转架,旋转架上安装有两个手臂架,手臂架上设置有手臂架轴板,所述手臂架轴板上分别安装有油缸转轴、手臂转轴,所述油缸转轴、手臂转轴分别与油缸的外壳、手臂的手臂铰接端可圆周转动装配;所述油缸的油缸轴与手臂轴可圆周转动装配,手臂轴安装在手臂的中间部分,手臂远离手臂铰接端的一端为抓取端,抓取端上安装有抓取轴,抓取轴用于在抓取压块时与压块轴钩合;手臂的中间部分上还安装有夹紧架,夹紧架远离手臂的一端上安装有夹板,夹板用于和钢梁的侧壁夹紧以抓取钢梁。
6.优选地,还包括安装壳内侧安装有旋转油缸,旋转油缸的旋转油缸轴上安装有第一法兰盘,第一法兰盘通过螺栓与第二法兰盘装配,第二法兰盘安装在旋转架的旋转柱一端上。
7.优选地,还包括安装板,所述安装板安装在安装壳上,所述安装板上安装有安装转轴,安装板通过安装转轴与外部装置装配,外部装置用于对机械手提供动力且移动机械手。
8.优选地,外部装置为挖机。
9.优选地,还包括旋转架,旋转架包括上旋转盘、下旋转盘,所述上旋转盘、下旋转盘均安装在旋转柱上;所述旋转架位于上旋转盘、下旋转盘之间的部分上安装有两个手臂架,所述手臂
架设置有手臂架连板,所述手臂架连板上安装有螺套;两个手臂架的螺套端部压紧且同轴装配,螺柱穿过两个手臂架的螺套、手臂架连板,且螺柱的两端分别穿出与之对应的手臂架连板后分别与不同的螺母旋合装配。
10.优选地,夹板上分别安装有第一凸条、第二凸条,在抓取钢梁时,第一凸条与钢梁的抓取边缘扣合,且第二凸条与钢梁的侧壁压紧。
11.优选地,夹紧架设置在抓取轴的上方,且夹板与旋转柱轴线的最小间距小于抓取轴与旋转柱轴线的最小间距。
12.本发明还公开了一种基桩静载试验压重系统,其应用有上述机械手。
13.优选地,还包括钢梁、压块,所述机械手用于抓取钢梁、压块并在钢梁、压块移动至堆放试验处时将钢梁、压块进行堆放以便于进行试验,所述钢梁、压块堆放成基桩静载试验压重平台。
14.优选地,所述压块上设置有压块槽,压块槽内安装有压块轴;所述钢梁的两侧壁上分别安装有钢梁侧板,所述钢梁侧板的侧边超出钢梁从而构成抓取边缘。
15.本发明的有益效果是:本发明在进行基桩静载试验压重平台搭设时,只需堆载机操作员在驾驶室操控机械手抓取、搬移、对方压块和钢梁,全过程无需其他人工,便可安装好基桩静载试验压重平台。一方面比较安全,另一方面效率很高,特别是本发明的机械手安装在挖掘机上时,其灵活性高,而且对路面要求低,可以有效克服现有起重机对地面强度要求高的问题,从而可以加快施工效率且降低成本。
附图说明
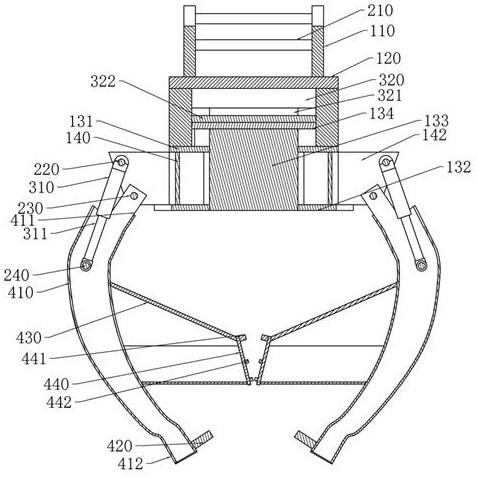
16.图1是机械手的结构示意图。
17.图2是机械手的结构示意图。
18.图3是机械手位于旋转柱轴线所在中心面处剖视图处剖视图。
19.图4是机械手的结构示意图。
20.图5是压块的结构示意图。
21.图6是机械手抓取压块时旋转柱轴线所在中心面处剖视图处剖视图。
22.图7是机械手抓取钢梁的结构示意图。
23.图8是机械手抓取钢梁时旋转柱轴线所在中心面处剖视图处剖视图。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
25.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
26.参见图1
‑
图8,本实施例的基桩静载试验压重系统,包括钢梁610、压块510、机械手,所述机械手用于抓取钢梁610、压块510并在钢梁610、压块510移动至堆放试验处时将钢
梁610、压块510进行堆放以便于进行试验,所述钢梁610、压块510堆放成基桩静载试验压重平台(装置),然后进入试验测试即可。
27.所述压块510上设置有压块槽511,压块槽511内安装有压块轴520,使用时,通过压块轴520起吊、搬运压块510。
28.所述钢梁610的两侧壁上分别安装有钢梁侧板620,所述钢梁侧板620的侧边超出钢梁610从而构成抓取边缘621。
29.所述机械手包括安装板110、安装壳120,所述安装板110上安装有安装转轴210,安装板110通过安装转轴210与外部装置装配,外部装置用于对机械手提供动力且移动机械手。本实施例的外部装置采用350长臂挖机,机械手安装在挖机安装挖斗处,现场进行基桩静载试验压重平台搭设时,350长臂挖机雨雪天气及场地未硬化均可作业,只需堆载机操作员在驾驶室操控机械手抓取压块,全过程无需其他人工,便安装好基桩静载试验压重平台。
30.所述安装板110安装在安装壳120上,安装壳120内侧安装有旋转油缸320,旋转油缸320的旋转油缸轴321上安装有第一法兰盘322,第一法兰盘322通过螺栓与第二法兰盘134装配,第二法兰盘134安装在旋转架130的旋转柱133一端上;所述旋转架130还包括上旋转盘131、下旋转盘132,所述上旋转盘131、下旋转盘132均安装在旋转柱133上。
31.所述旋转架130位于上旋转盘131、下旋转盘132之间的部分上安装有两个手臂架140,所述手臂架140上分别设置有手臂架连板141、手臂架轴板142,所述手臂架连板141上安装有螺套143。两个手臂架140的螺套143端部压紧且同轴装配,螺柱250穿过两个手臂架140的螺套143、手臂架连板141,且螺柱250的两端分别穿出与之对应的手臂架连板141后分别与不同的螺母251旋合装配,从而实现两个手臂架140的装配固定。本实施例中两个手臂架140可以通过螺柱装配后分别焊接固定在上旋转盘131、下旋转盘132上,从而大大增加两个手臂架140的强度。
32.所述手臂架轴板142上分别安装有油缸转轴220、手臂转轴230,所述油缸转轴220、手臂转轴230分别与油缸310的外壳、手臂410的手臂铰接端411可圆周转动装配;所述油缸310的油缸轴311与手臂轴240可圆周转动装配,手臂轴240安装在手臂410的中间部分,手臂410远离手臂铰接端411的一端为抓取端412,抓取端412上安装有抓取轴420,抓取轴420用于在抓取压块510时与压块轴520钩合,从而可以将压块510钩紧、起吊。
33.手臂410的中间部分上还安装有夹紧架430,夹紧架430远离手臂410的一端上安装有夹板440,夹板440上分别安装有第一凸条441、第二凸条442。在抓取钢梁时,第一凸条441与钢梁610的抓取边缘621扣合,且第二凸条442与钢梁610的侧壁压紧,从而可以对钢梁610进行有效的抓取,以确保后续对钢梁610的起吊、移送、堆放。本实施例中,夹紧架430设置在抓取轴420的上方可以避免抓取压块时,夹紧架430与压块510产生干涉,从而影响压块的抓取。而钢梁宽度小,夹板440与旋转柱轴线的最小间距小于抓取轴420与旋转柱轴线的最小间距,从而可以确保夹板440夹紧钢梁610时,抓取轴420不会造成干涉。
34.使用时,通过油缸310驱动油缸轴311伸缩即可带动手臂以手臂转轴230为中心相对于旋转架130转动,从而实现两个手臂的开度调节以实现压块、钢梁的夹取、释放。而在使用过程中可以通过旋转油缸320驱动旋转油缸轴321圆周转动,从而带动整个旋转架130旋转,以调节抓取、堆放角度,从而大大方便操作。当然本实施例中,油缸310可以采用具有伸缩功能的设备替代,如电缸、气缸等,而旋转油缸可以采用能够驱动旋转架130旋转的结构、
设备实现,理论上只需要实现旋转油缸的功能即可。
35.本发明未详述之处,均为本领域技术人员的公知技术。
36.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1