工作装置位置参数数据获取方法和装载机与流程
1.本发明涉及一种装载机,更具体地说,涉及一种装载机工作装置位置参数数据获取方法和装载机。
背景技术:
2.随着装载机技术的发展,人们在对装载机操作功能需求不断增加的同时,对操控舒适性要求也越来越高,为实现这些目的,装载机通常配备一些自动控制操作,例如自动铲装,或者在铲装过程中某个位置进行自动限位缓冲等。要进行这些自动控制操作,需要设定装载机工作装置的姿态位置,例如铲装卸料之后的铲斗自动贴地放平动作,需要设定动臂在不同位置铲斗相对动臂的角度,以便在动臂在某位置时将铲斗相对动臂的角度调整到相应的角度,以便在动臂下降到铲斗贴地位置时,铲斗刚好贴地放平。又比如动臂在不同位置时铲斗收斗至极限位置时相对动臂的收斗极限角度和铲斗放斗至极限时相对动臂的放斗极限角度,以便在装载机动臂在不同位置时,用于进行收斗或放斗至极限时进行缓冲。
3.中国专利cn110258713a公开了一种装载机工作装置位置参数数据获取方法,其方法是通过控制装载机自动完成多组特定动作时采集相关位置参数数据。这种数据获取方法,需要控制装载机进行多组特定数据,标定动作多,标定过程需要花费较多的时间,不利于产线上提高生产效率。
技术实现要素:
4.本发明要解决的技术问题是针对现有装载机工作装置位置参数数据获取方法相对繁杂的问题,而提供一种工作装置位置参数数据获取方法和装载机,简化相关参数获取步骤。
5.本发明为实现其目的的技术方案是这样的:提供一种工作装置位置参数数据获取方法,其特征在于以下步骤:
6.s1:获取预存的基础数据;所述基础数据包括:
7.动臂角度数组boomarr[],是动臂自铲斗贴地放平状态提升至极限位置之间各动臂转动角度位置的动臂角度组合;
[0008]
平举铲斗角度数组bucketarr[],是动臂平举铲斗升降过程中动臂处于动臂角度数组中各动臂角度位置时铲斗相对动臂的平举铲斗角度组合;
[0009]
收斗极限位铲斗角度数组buckettiltarr[],是铲斗处于收斗极限状态下动臂升降过程中动臂处于动臂角度数组中各动臂角度位置时铲斗相对动臂的收斗极限位铲斗角度组合;
[0010]
s2:通过控制程序自动控制装载机工作装置完成特定动作组并检测各特定动作终了时的标定角度;
[0011]
所述特定动作组包括将铲斗处于贴地放平状态开始将动臂提升至动臂提升极限位置的平举铲斗动作、在动臂提升极限位置将铲斗收斗至收斗极限位置的收斗动作;
[0012]
所述标定角度包括:平举铲斗动作终了时的动臂极限位标定角度和平举铲斗标定角度、收斗动作终了时的收斗极限位铲斗标定角度;
[0013]
s3:计算各标定角度与对应角度数组中动臂提升极限位所对应的角度的角度偏差;
[0014]
s4:对基础数据中各角度数组中的各角度元素与对应的角度偏差求和计算并存储获得装载机工作装置位置参数数据。
[0015]
在本发明中,通过执行一组特定动作组获取对应角度参数对预存的装载机工作装置位置参数的基础数据进行修正标定,从而获取工作装置位置参数数据。该方法所执行的标定动作少,能够简单、高效地获取工作装置位置数据。
[0016]
上述工作装置位置参数数据获取方法中,所述基础数据还包括:
[0017]
放斗极限位铲斗角度数组bucketduparr[],是铲斗处于放斗极限状态下动臂由提升极限位下降过程中动臂处于动臂角度数组中各动臂角度位置时铲斗相对动臂的放斗极限位铲斗角度组合;
[0018]
所述特定动作组还包括在动臂提升极限位置将铲斗放斗至放斗极限位置的放斗动作;
[0019]
所述标定角度还包括放斗动作终了时的放斗极限位铲斗标定角度:
[0020]
上述工作装置位置参数数据获取方法中,所述放斗极限位铲斗角度数组中各数组元素所对应的动臂角度范围小于动臂角度数组中各数组元素所对应的范围。
[0021]
上述工作装置位置参数数据获取方法中,所述特定动作组中的平举铲斗动作、放斗动作、收斗动作依次连贯完成。
[0022]
上述工作装置位置参数数据获取方法中,所述动臂角度数组中各元素的数值单调递增排布。
[0023]
本发明为实现其目的的技术方案是这样的:构造一种装载机,包括控制器,其特征在于所述控制器包括处理器和存储器,所述存储器存储有用于所述处理器读取与执行的控制程序,所述控制程序被所述处理器执行时,所述处理器执行前述工作装置位置参数数据获取方法的步骤。
[0024]
上述装载机中,还包括触发器,用于向所述处理器发送触发执行控制程序的触发指令。
[0025]
本发明与现有技术相比,在本发明通过少量的特定动作,获取对应角度参数对预存的装载机工作装置位置参数的基础数据进行修正标定,从而获取工作装置位置参数数据。该方法所执行的标定动作少,能够简单、高效地获取工作装置位置数据。
附图说明
[0026]
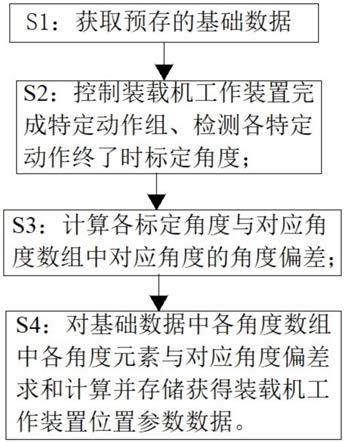
图1是本发明工作装置位置参数数据获取方法的流程图。
[0027]
图2是特定动作组的自动操作流程图。
具体实施方式
[0028]
下面结合附图说明具体实施方案。
[0029]
如图1图2所示,本实施例提供一种工作装置位置参数数据获取方法,该方法用于
获取装载机工作装置位置参数数据。工作装置位置参数数据用于装载机的自动控制。
[0030]
位置参数数据获取方法步骤如下:
[0031]
s1:获取预存的基础数据;
[0032]
s2:通过控制程序自动控制装载机工作装置完成特定动作组并检测各特定动作终了时的标定角度;
[0033]
s3:计算各标定角度与对应角度数组中动臂提升极限位所对应的角度的角度偏差;
[0034]
s4:对基础数据中各角度数组中的各角度元素与对应的角度偏差求和计算并存储获得装载机工作装置位置参数数据。
[0035]
其中基础数据可通过对一台装载机进行手动或自动标定获得。获得基础数据后,同型号的装载机只需要在基础数据的基础上通过本发明方法步骤进行修正标定即可获得控制所需的工作装置特定位置的数据。
[0036]
基础数据包括:动臂角度数组boomarr[]、平举铲斗角度数组bucketarr[]、收斗极限位铲斗角度数组buckettiltarr[]和放斗极限位铲斗角度数组bucketduparr[]。
[0037]
动臂角度数组:记为boomarr[]={boomarr[0],boomarr[1],
……
,boomarr[n]},是动臂自铲斗贴地放平状态提升至极限位置之间各动臂转动角度位置的动臂角度组合;即在获取基础数据数据而进行的手动或自动标定过程中,将铲斗放平贴地后提升动臂而进行的平举铲斗动作,平举铲斗动作中,不对铲斗进行收放操作。平举铲斗动作中,随着动臂的提升而记录动臂在各个举升高度的角度(通常是相对前车架的角度),需要记录那些高度的动臂角度需装载机控制需要决定,通常第一个角度是铲斗处于贴地放平的状态,将该角度作为动臂角度数组的第一元素,即boomarr[0],动臂角度数组的最后一各元素是动臂举升至极限位时的角度,记为boomarr[n],从boomarr[0]至boomarr[n]所对应的角度单调递增。
[0038]
平举铲斗角度数组:记为bucketarr[]={bucketarr[0],bucketarr[1],
……
,bucketarr[n]},是动臂平举铲斗升降过程中动臂处于动臂角度数组中各动臂角度位置时铲斗相对动臂的平举铲斗角度组合,即在获取基础数据数据的标定过程中,在平举铲斗动作中每记录一各动臂角度数值的同时还记录一个铲斗相对动臂的角度。因此平举铲斗角度数组的第一个元素bucketarr[0]是铲斗处于放平贴地状态下相对动臂的角度,最后一个角度是铲斗保持放平贴地状态下不进行铲斗操作将动臂举升至极限位时铲斗相对动臂的角度,记为boomarr[n]。铲斗铰接于动臂的前端,铲斗同时通过连杆与转动安装于动臂横梁上的摇臂连接,铲斗相对动臂的角度与摇臂相对动臂的角度具有一一对应的关系,因此生产实践中,铲斗与动臂的角度关系通常通过检测摇臂相对动臂的角度进行计算获取或者直接用摇臂相对动臂的角度表征。
[0039]
收斗极限位铲斗角度数组:记为buckettiltarr[]={buckettiltarr[0],buckettiltarr[1],
……
,buckettiltarr[n]},是铲斗处于收斗极限状态下动臂升降过程中动臂处于动臂角度数组中各动臂角度位置时铲斗相对动臂的收斗极限位铲斗角度组合;即在获取基础数据数据的标定过程中,铲斗在放平贴地的状态下保持动臂高度不变进行收斗动作,将铲斗收斗至极限位置,然后提升动臂,并在动臂处于动臂角度数组boomarr[]中各元素所对应的角度位置时记录铲斗相对动臂的角度,也即收斗极限位铲斗角度数组的第一元素buckettiltarr[0]与动臂角度数组的第一个元素boomarr[1]对应,收斗极限位铲斗
角度数组的最后元素buckettiltarr[0]与动臂角度数组的最后元素boomarr[n]对应。
[0040]
放斗极限位铲斗角度数组:记为bucketduparr[]={bucketduparr[0],bucketduparr[1],
……
,bucketduparr[m]},是在获取基础数据数据的标定过程中,铲斗处于放斗极限状态下动臂由提升极限位下降过程中动臂处于动臂角度数组中各动臂角度位置时铲斗相对动臂的放斗极限位铲斗角度组合;由于放斗至极限位置,在动臂保持同样高度的情况下铲斗上的最低位置相对于铲斗处于放平贴地状态下有所下降,因此动臂在铲斗处于放斗极限位状态下下降,动臂下降的最低位置(铲斗斗齿触地)要高于铲斗处于放平贴地状态下的动臂高度。因此对于放斗极限位铲斗角度数组,最后一个元素bucketduparr[m]所对应的动臂角度与动臂角度数组的最后一个元素boomarr[n],但放斗极限位铲斗角度数组的第一个元素bucketduparr[0]所对应的动臂角度却是与动臂举升到一定高度之后的某个高度位置对应。
[0041]
对于某一型号的装载机,制造商可通过对一台装载机进行手动或自动标定获得基础数据,然后将该基础数据预存至该型号的其他装载机上,以便对其他装载机进行标定,获取准确的工作装置位置参数数据。
[0042]
在步骤s2中,获取预存的基础数据之后,通过控制程序自动控制装载机工作装置完成特定动作组并检测各特定动作终了时的标定角度。
[0043]
特定动作组包括将铲斗处于贴地放平状态开始将动臂提升至动臂提升极限位置的平举铲斗动作、在动臂提升极限位置将铲斗放斗至放斗极限位置的放斗动作,将铲斗收斗至收斗极限位置的收斗动作;特定动作组中的平举铲斗动作、放斗动作、收斗动作依次连贯完成,即动臂由铲斗的放平贴地状态开始举升至动臂提升极限位置,然后保持动臂不动的情况下进行放斗动作,将铲斗放斗至放斗极限位置,之后进行收斗动作,在保持动臂不动的情况下将铲斗收斗至极限。
[0044]
所述标定角度包括动臂极限位标定角度、平举铲斗标定角度、放斗极限位铲斗标定角度、收斗极限位铲斗标定角度。在各特定动作终了时检测对应的标定角度,即在平举铲斗动作终了时检测动臂极限位标定角度和平举铲斗标定角度,动臂极限位标定角度记为boom_max_ang;平举铲斗标定角度记为bucket_flat_ang;在放斗动作终了时检测放斗极限位铲斗标定角度,记为bucket_dum_ang;在收斗动作终了时的收斗极限位铲斗标定角度,记为bucket_tilt_ang。
[0045]
在步骤s3中,计算各标定角度与对应角度数组中动臂提升极限位所对应的角度的角度偏差,即计算:
[0046]
动臂角度偏差:动臂极限位标定角度与动臂角度数组中最后一个元素boomarr[n]之间的差值:δboom=boom_max_ang
‑
boomarr[n];
[0047]
平举铲斗角度偏差:平举铲斗标定角度与平举铲斗角度数组中最后一个元素bucketarr[n]之间的差值:δbuckflat=bucket_flat_ang
‑
bucketarr[n];
[0048]
放斗极限位铲斗角度偏差:放斗极限位铲斗标定角度与放斗极限位铲斗角度数组中最后一个元素bucketduparr[m]之间的差值:δbuckdup=bucket_dum_ang
‑
bucketduparr[m];
[0049]
收斗极限位铲斗角度偏差:收斗极限位铲斗标定角度与收斗极限位铲斗角度数组中最后一个元素buckettiltarr[n]之间的差值:δbucktilt=bucket_tilt_ang
‑
buckettiltarr[n]。
[0050]
在步骤s4中,根据计算获取的各个角度偏差,对基础数据中各角度数组中的各角度元素进行修正,得到该装载机经修正标定的工作装置位置参数数据,并进行保存。工作装置位置参数数据包括经过标定修正的动臂角度数组newboomarr[]、平举铲斗角度数组newbucketarr[]、收斗极限位铲斗角度数组newbuckettiltarr[]、放斗极限位铲斗角度数组newbucketduparr[]。具体步骤是:
[0051]
动臂角度数组newboomarr[]={boomarr[0]+δboom,boomarr[1]+δboom,
……
,boomarr[n]+δboom};
[0052]
平举铲斗角度数组newbucketarr[]={bucketarr[0]+δbuckflat,bucketarr[1]+δbuckflat,
……
,bucketarr[n]+δbuckflat};
[0053]
收斗极限位铲斗角度数组newbuckettiltarr[]={buckettiltarr[0]+δbucktilt,buckettiltarr[1]+δbucktilt,
……
,buckettiltarr[n]+δbucktilt};
[0054]
放斗极限位铲斗角度数组newbucketduparr[]={bucketduparr[0]+δbuckdup,bucketduparr[1]+δbuckdup,
……
,bucketduparr[n]+δbuckdup}。
[0055]
将修正后获得的新的工作装置特定位置的角度数组数据进行存储,并用于装载机动臂和铲斗的极限位的缓冲控制以及自动运动控制。
[0056]
本发明装载机,包括控制器、触发器,控制器包括处理器和存储器,存储器存储有用于处理器读取与执行的控制程序,所述控制程序被所述处理器执行时,所述处理器执行前述工作装置位置参数数据获取方法的步骤。触发器用于向所述处理器发送触发执行控制程序的触发指令。
[0057]
在本发明中,基础数据可通过对一台装载机进行手动或自动标定获得,获得基础数据后,同型号的装载机只需要进行上述简单的标定即可获得控制所需的工作装置位置参数的数据。该方法所执行的标定动作少,能够简单、高效地获取工作装置位置数据。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1