一种基于分步式管网智能清淤机器人系统的制作方法
1.本发明涉及市政工程领域,具体而言,涉及一种基于分步式管网智能清淤机器人系统。
背景技术:
2.城市化进程的快速发展,导致地下管网淤堵越发严重。按照传统管网清淤的方式,无法对管径较小管道以及管道深处淤堵物进行人工下井作业。另外,管道内环境复杂,充满危险气体,稍有不慎就会出现人员伤亡与爆炸。
技术实现要素:
3.为了弥补以上不足,本发明提供了一种基于分步式管网智能清淤机器人系统,旨在改善无法对管径较小管道以及管道深处淤堵物进行人工下井作业。另外,管道内环境复杂,充满危险气体,稍有不慎就会出现人员伤亡与爆炸的问题。
4.本发明是这样实现的:
5.本发明提供一种基于分步式管网智能清淤机器人系统,包括清淤组件和牵引组件。
6.所述清淤组件包括第一供电箱、第一中继绕线轮、第二供电箱、第二中继绕线轮、机器人前牵引数据线缆、机器人后牵引数据线缆、远程监控平台、线缆固定装置、检测清淤机器人和控制端,所述第一供电箱、所述第一中继绕线轮、所述第二供电箱和所述第二中继绕线轮均固定在地面上,所述机器人前牵引数据线缆的一端设置在所述检测清淤机器人上。
7.所述机器人前牵引数据线缆的另一端缠绕设置在所述第二中继绕线轮上,所述机器人后牵引数据线缆的一端设置在所述检测清淤机器人上,所述机器人后牵引数据线缆的另一端缠绕设置在所述第一中继绕线轮上,所述机器人前牵引数据线缆和所述机器人后牵引数据线缆分别穿过不同的所述线缆固定装置,所述第一供电箱和所述第一中继绕线轮电性连接在一起,所述第二供电箱和所述第二中继绕线轮电性连接在一起,所述第一中继绕线轮和所述第二中继绕线轮均与所述控制端信号连接,所述控制端与所述远程监控平台信号连接。
8.所述牵引组件包括吊装装置、网兜牵引绳和固态淤堵物收集网兜,所述吊装装置固定在地面上,所述网兜牵引绳的一端固定设置在所述吊装装置上,所述网兜牵引绳的另一端固定设置在所述固态淤堵物收集网兜上。
9.在本发明的一种实施例中,所述线缆固定装置包括线缆导向机构、第一电缸、第二电缸、第三电缸和第四电缸,所述第一电缸、所述第二电缸、所述第三电缸和所述第四电缸均固定在所述线缆导向机构上。
10.在本发明的一种实施例中,所述检测清淤机器人包括清淤机器人机体、管道底部导向轮、清淤铲和翻泥铲作业头,所述管道底部导向轮转动设置在所述清淤机器人机体上,
所述清淤铲和所述翻泥铲作业头均设置在所述清淤机器人机体上。
11.在本发明的一种实施例中,所述检测清淤机器人还包括升降平台、管道顶部导向轮和摄像模块,所述升降平台固定在所述清淤机器人机体的上表面上,所述管道顶部导向轮转动设置在所述升降平台上,所述摄像模块固定在所述升降平台上。
12.在本发明的一种实施例中,所述第一中继绕线轮和所述第二中继绕线轮均由定位模块、控制模块、通讯模块、绕线动力模块、供电系统和操作控制台组成,定位模块和控制模块电性连接在一起,控制模块和绕线动力模块电性连接在一起,绕线动力模块和供电系统电性连接在一起,通讯模块和操作控制台电性连接在一起,控制模块和通讯模块电性连接在一起。
13.在本发明的一种实施例中,所述检测清淤机器人由通讯模块、中央处理模块、控制模块和传感器组成,通讯模块和中央处理模块电性连接在一起,通讯模块和控制模块电性连接在一起,控制模块和传感器电性连接在一起,所述第一中继绕线轮和所述第二中继绕线轮上的通讯模块均与所述检测清淤机器人上的通讯模块电性连接在一起。
14.在本发明的一种实施例中,所述机器人前牵引数据线缆和所述机器人后牵引数据线缆均与所述检测清淤机器人电性连接在一起。
15.在本发明的一种实施例中,所述供电系统由所述第一供电箱和所述第二供电箱组成。
16.在本发明的一种实施例中,所述操作控制台由显示屏、主板和遥控装置组成。
17.本发明的有益效果是:本发明通过上述设计得到的一种基于分步式管网智能清淤机器人系统,使用时,把线缆固定装置放置到检查井内,线缆固定装置在检查井指定的位置处撑开,使其固定与井壁上,把机器人前牵引数据线缆和机器人后牵引数据线缆穿过不同的线缆固定装置,在管道内适当位置处弯曲进入到管道,机器人前牵引数据线缆和机器人后牵引数据线缆的端部均固定于检测清淤机器人上,机器人后牵引数据线缆与第一中继绕线轮相连,机器人前牵引数据线缆与第二中继绕线轮相连,第一中继绕线轮和第二中继绕线轮通过无线通讯相互传输数据,并通过算法自动协调各自的旋转方向,当第二中继绕线轮旋转收线时,检测清淤机器人会被机器人前牵引数据线缆向前方牵引行驶,在此过程中检测清淤机器人上的翻泥铲作业头会将淤堵物铲起翻松,便于后续清理,检测清淤机器人上每前进一小段后,第二中继绕线轮旋转放线,第一中继绕线轮旋转收线,机器人后牵引数据线缆将检测清淤机器人向后拖动,同时检测清淤机器人上的伞状清淤铲张开,将后方的淤堵物推出管道,掉落至固态淤堵物收集网兜内,如此反复多次,可将管道内的淤堵物全部通过固态淤堵物收集网兜吊离井口,在整个清理过程中,可通过吸淤泵将清理至检查井的泥水混合物进行抽取,同时在地面通过泥水分离设备进行泥水分离,污水回流下水道,泥水分离后的泥沙运至指定地方,整段管道清淤作业完成,该清淤机器人系统可自动的对管道内的淤泥进行清理,提高了对管道内淤泥的清理效率。
18.本发明的有益效果是:为了能在小管径中且管道深处进行清淤作业,并提高工作效率,同时可以满足全天候免人工下井作业要求,采用分步式智能管网机器人,将管网中的淤泥分割,每次清理部分淤堵物至检查井内的网兜,待收集到足够多大块固态淤堵物后,由吊装装置吊出井口,通过模块化设计可以实现远程管网检测,清理与维护等一体化作业,同时能够实时将作业及管道检测数据通过网络回传至平台,并进行远程指挥与操作,通过这
种方式可以使地下的管网系统更加透明,使地下管网系统具备极高的信息化水平,让城市现代化治理水平进入全新阶段。
附图说明
19.为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
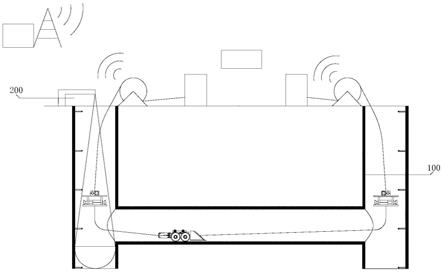
20.图1为本发明实施方式提供的一种基于分步式管网智能清淤机器人系统的剖面结构示意图;
21.图2为本发明实施方式提供的清淤组件的剖面结构示意图;
22.图3为本发明实施方式提供的图2中a区域的放大图;
23.图4为本发明实施方式提供的牵引组件的剖面结构示意图;
24.图5为本发明实施方式提供的线缆固定装置的结构示意图;
25.图6为本发明实施方式提供的检测清淤机器人的结构示意图;
26.图7为本发明实施方式提供的分步式管网检测清淤机器人系统的工作原理图。
27.图中:100-清淤组件;120-第一供电箱;130-第一中继绕线轮;140-第二供电箱;150-第二中继绕线轮;170-机器人前牵引数据线缆;180-机器人后牵引数据线缆;190-远程监控平台;191-线缆固定装置;1911-线缆导向机构;1912-第一电缸;1913-第二电缸;1914-第三电缸;1915-第四电缸;192-检测清淤机器人;1921-清淤机器人机体;1922-管道底部导向轮;1923-清淤铲;1924-翻泥铲作业头;1925-升降平台;1926-管道顶部导向轮;1927-摄像模块;193-控制端;200-牵引组件;210-吊装装置;220-网兜牵引绳;230-固态淤堵物收集网兜;310-地面;320-检查井。
具体实施方式
28.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
29.实施例
30.请参阅图1-7,本发明提供一种技术方案:一种基于分步式管网智能清淤机器人系统,包括清淤组件100和牵引组件200。牵引组件200固定在清淤组件100上,该清淤机器人系统可自动的对管道内的淤泥进行清理,提高了对管道内淤泥的清理效率。
31.请参阅图1-图3和图5-图7,清淤组件100包括第一供电箱120、第一中继绕线轮130、第二供电箱140、第二中继绕线轮150、机器人前牵引数据线缆170、机器人后牵引数据线缆180、远程监控平台190、线缆固定装置191、检测清淤机器人192和控制端193,第一供电箱120、第一中继绕线轮130、第二供电箱140和第二中继绕线轮150均通过螺栓固定在地面310上,第一中继绕线轮130和第二中继绕线轮150均由定位模块、控制模块、通讯模块、绕线
动力模块、供电系统和操作控制台组成,定位模块和控制模块电性连接在一起,控制模块和绕线动力模块电性连接在一起,绕线动力模块和供电系统电性连接在一起,通讯模块和操作控制台电性连接在一起,控制模块和通讯模块电性连接在一起,便于对第一中继绕线轮130和第二中继绕线轮150进行控制。
32.供电系统由第一供电箱120和第二供电箱140组成,供电系统为整个该机器人系统提供稳定电源,操作控制台由显示屏、主板和遥控装置组成,操作控制台可以向检测清淤机器人192发送控制指令,查看检测清淤机器人192的各类运行数据,相关数据信息及实时视频显示在显示屏上,通过遥控装置操控检测清淤机器人192移动及姿态调整,检测清淤机器人192由通讯模块、中央处理模块、控制模块和传感器组成,通讯模块和中央处理模块电性连接在一起,通讯模块和控制模块电性连接在一起,控制模块和传感器电性连接在一起,第一中继绕线轮130和第二中继绕线轮150上的通讯模块均与检测清淤机器人192上的通讯模块电性连接在一起,便于对检测清淤机器人192进行控制。
33.机器人前牵引数据线缆170的一端设置在检测清淤机器人192上,检测清淤机器人192包括清淤机器人机体1921、管道底部导向轮1922、清淤铲1923和翻泥铲作业头1924,管道底部导向轮1922转动设置在清淤机器人机体1921上,清淤铲1923和翻泥铲作业头1924均设置在清淤机器人机体1921上,翻泥铲作业头1924用于前进时将淤堵的淤泥铲开,翻松,便于后续清理,清淤铲1923在机器人后牵引数据线缆180的牵引下后退时会张开,从而能将后方的淤堵物推至检查井320,掉入固态淤堵物收集网兜230,检测清淤机器人192还包括升降平台1925、管道顶部导向轮1926和摄像模块1927,升降平台1925通过螺栓固定在清淤机器人机体1921的上表面上,管道顶部导向轮1926转动设置在升降平台1925上,摄像模块1927通过螺栓固定在升降平台1925上,升降平台1925和管道顶部导向轮1926确保清淤机器人机体1921姿态在管道内不易发生改变,为清淤机器人机体1921提供足够的抓地力。
34.机器人前牵引数据线缆170的另一端缠绕设置在第二中继绕线轮150上,机器人后牵引数据线缆180的一端设置在检测清淤机器人192上,机器人后牵引数据线缆180的另一端缠绕设置在第一中继绕线轮130上,机器人前牵引数据线缆170和机器人后牵引数据线缆180均与检测清淤机器人192电性连接在一起,机器人前牵引数据线缆170和机器人后牵引数据线缆180便于把管道信息及机器人自身运行状态数据传至给第一中继绕线轮130和第二中继绕线轮150,机器人前牵引数据线缆170和机器人后牵引数据线缆180分别穿过不同的线缆固定装置191,线缆固定装置191包括线缆导向机构1911、第一电缸1912、第二电缸1913、第三电缸1914和第四电缸1915,第一电缸1912、第二电缸1913、第三电缸1914和第四电缸1915均通过螺栓固定在线缆导向机构1911上,第一电缸1912、第二电缸1913、第三电缸1914和第四电缸1915的活塞杆端部通过挤压检查井320的内壁,使线缆导向机构1911被牢固的固定在检查井320内,第一供电箱120和第一中继绕线轮130电性连接在一起,第二供电箱140和第二中继绕线轮150电性连接在一起,第一中继绕线轮130和第二中继绕线轮150均与控制端193信号连接,控制端193与远程监控平台190信号连接。
35.请参阅图1和图4,牵引组件200包括吊装装置210、网兜牵引绳220和固态淤堵物收集网兜230,吊装装置210通过螺栓固定在地面310上,网兜牵引绳220的一端通过螺栓固定设置在吊装装置210上,网兜牵引绳220的另一端通过螺栓固定设置在固态淤堵物收集网兜230上。
36.具体的,该基于分步式管网智能清淤机器人系统的工作原理:使用时,把线缆固定装置191放置到检查井320内,线缆固定装置191在检查井320指定的位置处撑开,使其固定与井壁上,把机器人前牵引数据线缆170和机器人后牵引数据线缆180穿过不同的线缆固定装置191,在管道内适当位置处弯曲进入到管道,机器人前牵引数据线缆170和机器人后牵引数据线缆180的端部均固定于检测清淤机器人192上,机器人后牵引数据线缆180与第一中继绕线轮130相连,机器人前牵引数据线缆170与第二中继绕线轮150相连,第一中继绕线轮130和第二中继绕线轮150通过无线通讯相互传输数据,并通过算法自动协调各自的旋转方向,当第二中继绕线轮150旋转收线时,检测清淤机器人192会被机器人前牵引数据线缆170向前方牵引行驶,在此过程中检测清淤机器人192上的翻泥铲作业头会将淤堵物铲起翻松,便于后续清理,检测清淤机器人192上每前进一小段后,第二中继绕线轮150旋转放线,第一中继绕线轮130旋转收线,机器人后牵引数据线缆180将检测清淤机器人192向后拖动,同时检测清淤机器人192上的伞状清淤铲张开,将后方的淤堵物推出管道,掉落至固态淤堵物收集网兜230内,如此反复多次,可将管道内的淤堵物全部通过固态淤堵物收集网兜230吊离井口,在整个清理过程中,可通过吸淤泵将清理至检查井320的泥水混合物进行抽取,同时在地面通过泥水分离设备进行泥水分离,污水回流下水道,泥水分离后的泥沙运至指定地方,整段管道清淤作业完成,该清淤机器人系统可自动的对管道内的淤泥进行清理,提高了对管道内淤泥的清理效率。
37.需要说明的是,第一供电箱120、第一中继绕线轮130、第二供电箱140、第二中继绕线轮150、机器人前牵引数据线缆170、机器人后牵引数据线缆180、远程监控平台190、线缆固定装置191、检测清淤机器人192、控制端193和吊装装置210具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。
38.第一供电箱120、第一中继绕线轮130、第二供电箱140、第二中继绕线轮150、机器人前牵引数据线缆170、机器人后牵引数据线缆180、远程监控平台190、线缆固定装置191、检测清淤机器人192、控制端193和吊装装置210的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
39.以上仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1