一种基于仿生清道夫的海上垃圾清洁用智能机器人
1.本发明涉及仿生机器人技术领域,具体是指一种基于仿生清道夫的海上垃圾清洁用智能机器人。
背景技术:
2.随着各国快速发展,人们在日常生活中产生各种垃圾及废弃物。世界各大海域环境常常遭受漂浮垃圾的威胁,目前可知海上垃圾主要是塑料、泡沫和生活废弃物,而这些难以降解的垃圾更容易被生物所寄居,助长物种入侵隐患。其主要包括商业船只排放的货运垃圾和厨房垃圾、渔船丢弃的渔网和钓鱼箱、日常生活垃圾、工业生产垃圾、医疗废物以及不断排放入海的污水等。如果这些垃圾没有及时清理,经过海水浸泡和风吹,会危及海水水质。也使得许多海域原有生物大量灭绝,严重地破坏了生物多样性和生态平衡。传统的垃圾清理模式,主要是通过人为打捞,效率比较低,同时又消耗了大量的人力和财力,仅仅靠人力是很难完成的,而且人的生命安全很难保证。且遇到台风等极端天气,人力处理起来十分困难。
3.所以,一种基于仿生清道夫的海上垃圾清洁用智能机器人成为人们亟待解决的问题。
技术实现要素:
4.本发明要解决的技术问题是传统的垃圾清理模式,主要是通过人为打捞,效率比较低,同时又消耗了大量的人力和财力,仅仅靠人力是很难完成的,而且人的生命安全很难保证。且遇到台风等极端天气,人力处理起来十分困难。
5.为解决上述技术问题,本发明提供的技术方案为:一种基于仿生清道夫的海上垃圾清洁用智能机器人,包括机器人,所述机器人包括机器人本体和控制电路,所述控制电路设置于机器人本体中,所述机器人包括机身,所述机身头部设有机械鱼鳃和眼睛,所述机身尾部设有尾鳍,所述机身外部涂有防水涂料,所述机身内部设有若干密封圈,所述机身内还设有动力部件;
6.所述控制电路包括机器人车载控制器、供电系统、无线控制系统、传感系统以及执行系统;所述太供电系统为机器人车载控制器、传感系统以及执行系统提供电能,所述传感系统将采集到的数据发送至机器人车载控制器,所述机器人车载控制器将接收到的数据进行分析与处理,根据分析与处理的结果给执行系统下发指令,所述无线控制系统直接给机器人车载控制器下发指令,所述机器人车载控制器根据接收到的指令直接发送至执行系统;
7.所述传感系统包括摄像机、超声波模块、gps定位模块、姿态传感器以及风向传感器;
8.所述执行系统包括左螺旋桨、右螺旋桨、机械臂以及传送带;
9.所述无线控制系统包括蓝牙模块和无线遥控模块。
10.进一步的,所述机身呈清道夫鱼形设置。
11.进一步的,所述执行系统采用鱼吃食原理进行工作,所述机械鱼鳃先将垃圾吸入,再利用机械鱼鳃将垃圾挡在机器人口中,将水滤出。
12.进一步的,所述动力部件采用gw370直流减速电机与推进器相结合,所述尾鳍通过直流无刷电机提供动能。
13.进一步的,所述供电系统包括电源模块、太阳能板、蓄电池以及转换器,所述太阳能板通过转换器将太阳能转化成电能,所述蓄电池将化学能转化成电能,所述电源模块提供12v、5v、3.3v的直流电压。
14.进一步的,所述眼睛采用光敏电阻制作而成。
15.进一步的,所述蓝牙模块的型号为hc-06,所述无线遥控模块的型号为pt2262。
16.进一步的,所述gps定位模块采用skg1223。
17.本发明与现有技术相比的优点在于:本发明采用呈清道夫鱼形的机身,有效减少水带来的阻力;尾鳍的设置能有效地改变机器人的行进方向;机身外部涂有的防水涂料以及密封圈的设置能有效地防止水渗入机身内部;供电系统采用双重供电的方式,不仅有效地避免了机器人因供电不足而导致无法完成任务,还满足不同电压的供电需求;机器人眼睛采用光敏电阻,使得机器人的眼睛体积小、可靠性好以及灵敏度更高;本发明设计合理,值得大力推广。
附图说明
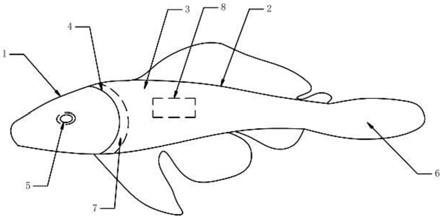
18.图1是本发明一种基于仿生清道夫的海上垃圾清洁用智能机器人的结构示意图。
19.图2是本发明一种基于仿生清道夫的海上垃圾清洁用智能机器人的系统框架图。
20.如图所示:1、机器人,2、机器人本体,3、机身,4、机械鱼鳃,5、眼睛,6、尾鳍,7、密封圈,8、动力部件。
具体实施方式
21.下面结合附图对本发明一种基于仿生清道夫的海上垃圾清洁用智能机器人做进一步的详细说明。
22.结合附图1-2,对本发明进行详细介绍。
23.一种基于仿生清道夫的海上垃圾清洁用智能机器人,包括机器人1,所述机器人1包括机器人本体2和控制电路,所述控制电路设置于机器人本体2中,所述机器人1包括机身3,所述机身3头部设有机械鱼鳃4和眼睛5,所述机身3尾部设有尾鳍6,所述机身3外部涂有防水涂料,所述机身3内部设有若干密封圈7,所述机身3内还设有动力部件8;
24.所述控制电路包括机器人车载控制器、供电系统、无线控制系统、传感系统以及执行系统;所述太供电系统为机器人车载控制器、传感系统以及执行系统提供电能,所述传感系统将采集到的数据发送至机器人车载控制器,所述机器人车载控制器将接收到的数据进行分析与处理,根据分析与处理的结果给执行系统下发指令,所述无线控制系统直接给机器人车载控制器下发指令,所述机器人车载控制器根据接收到的指令直接发送至执行系统;
25.所述传感系统包括摄像机、超声波模块、gps定位模块、姿态传感器以及风向传感
器;
26.所述执行系统包括左螺旋桨、右螺旋桨、机械臂以及传送带;
27.所述无线控制系统包括蓝牙模块和无线遥控模块。
28.所述机身3呈清道夫鱼形设置。
29.所述执行系统采用鱼吃食原理进行工作,所述机械鱼鳃先将垃圾吸入,再利用机械鱼鳃将垃圾挡在机器人口中,将水滤出。
30.所述动力部件8采用gw370直流减速电机与推进器相结合,所述尾鳍6通过直流无刷电机提供动能。
31.所述供电系统包括电源模块、太阳能板、蓄电池以及转换器,所述太阳能板通过转换器将太阳能转化成电能,所述蓄电池将化学能转化成电能,所述电源模块提供12v、5v、3.3v的直流电压。
32.所述眼睛5采用光敏电阻制作而成。
33.所述蓝牙模块的型号为hc-06,所述无线遥控模块的型号为pt2262。
34.所述gps定位模块采用skg1223。
35.本发明一种基于仿生清道夫的海上垃圾清洁用智能机器人的具体实施过程如下:实施例一:首先使用无线控制系统向机器人车载控制器发送动力部件控制指令,机器人车载控制器根据接收到的无线控制系统发送的动力部件控制指令,控制动力部件中减速电机的转动,从而带动推动器运行,带动鱼鳍运动,从而实现机器人在水面上完成前进、后腿、左转、右转的动作,使机器人到达清理水域。
36.实施例二:
37.通过传感系统将采集到的数据发送至机器人车载控制器,机器人车载控制器将接收到的数据进行分析与处理,根据分析与处理的结果给执行系统下发指令,进行控制动力部件中减速电机的转动,从而带动推动器运行,带动鱼鳍运动,从而实现机器人在水面上完成前进、后腿、左转、右转的动作,使机器人到达清理水域。
38.本发明采用呈清道夫鱼形的机身3,有效减少水带来的阻力;尾鳍6的设置能有效地改变机器人的行进方向;机身3外部涂有的防水涂料以及密封圈的设置能有效地防止水渗入机身3内部;供电系统采用双重供电的方式,不仅有效地避免了机器人因供电不足而导致无法完成任务,还满足不同电压的供电需求;机器人眼睛采用光敏电阻,使得机器人的眼睛体积小、可靠性好以及灵敏度更高;本发明设计合理,值得大力推广。
39.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1