一种自定位稳桩平台的制作方法
1.本实用新型涉及船舶海洋工程装备技术领域,具体涉及一种自定位稳桩平台。
背景技术:
2.目前,在建造海上风机基础时,需要先将多根工程桩沉桩到海底,这时,要先通过吊装,将工程桩吊至沉桩点,然后再进行沉桩。为了使工程桩能顺利入泥插桩及沉桩过程中确保桩身垂直度在3
‰
以内,往往要利用稳桩平台对工程桩进行稳桩。稳桩平台是一种海上打桩施工时用于调整单桩垂直度的工具。随着海上风电场的开发,海上风电场建设有两个发展趋势:一是其建设水深由潮间带向浅海发展,二是风机的单机容量不断增大以及机组逐步大型化。为解决稳桩平台运输困难,单桩吊装难度大和吊机要求高等问题提出了一种漂浮式稳桩平台,能够在稳桩平台转场及施工安装的前期自我维持漂浮状态。
3.虽然漂浮式稳桩平台节约了运输船以及吊机资源,但是漂浮式稳桩平台工艺相对复杂,操作难度大,且不易定位易造成施工效率低。因此需要一种自定位稳桩平台解决现有技术中难定位的问题。
技术实现要素:
4.因此,本实用新型要解决的技术问题在于克服现有技术中定位难的缺陷,从而提供一种自定位稳桩平台。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
6.一种自定位稳桩平台,包括:
7.钢桁架,所述钢桁架呈四方体的空间桁架结构,所述钢桁架一侧设有抱桩器,所述钢桁架底部设有浮箱,所述钢桁架平台上设有gps定位系统;
8.支腿,所述支腿可拆卸设置在钢桁架四角,所述支腿间均设有十字加强杆;
9.定位件,所述定位件用于控制支腿的轴向运动,所述定位件包括齿轮件和齿条件,所述齿条件固定在支腿上,所述齿轮件与齿条件啮合。
10.通过采用上述技术方案,对稳桩平台整体结构进行优化设计,在不影响自漂浮状态下实现定位固定,操作简单且施工效率高,加装gps定位系统,能够自动检测定位稳桩平台所在位置,同时可以在施工作业前,配合拖轮遥控实现作业的初始定位;定位件可以适时调整进行稳桩平台的临时自定位,实现临时安装作业的工作稳定性,提高了海上作业的机动性。
11.进一步的,所述钢桁架从上至下依次包括平台层、抱桩层和漂浮层,所述平台层和抱桩层同侧均固定有抱桩器,所述漂浮层内固定有浮箱,所述浮箱阵列设有多个,每个所述浮箱上均设有进排水口阀门。
12.通过采用上述技术方案,设置在漂浮层内的浮箱实现稳桩平台的自浮性,抱桩器和吊装设备的配合能够完成定位柱或单桩的抱桩作业,实现稳桩目的,提高沉桩精度。
13.进一步的,所述齿轮件设在支腿外侧,所述齿轮件包括与齿条件啮合的升降齿轮
和驱动升降齿轮转动驱动件,所述升降齿轮轴线与支腿轴线垂直设置。
14.通过采用上述技术方案,齿轮件和齿条件的配合实现支腿的升降,从而能够控制支腿压入泥土中实现支腿的临时定位,从而达到临时固定稳桩平台的目的。
15.进一步的,所述齿条件包括齿条块、连接弧板、连接板和连接销,所述连接弧板套设在支腿外壁上,所述连接板与连接弧板一体垂直设置,所述齿条块固定在连接弧板远离连接板的一侧侧壁,所述齿条块与升降齿轮啮合,所述连接销穿过连接板并固定连接弧板。
16.通过采用上述技术方案,齿条件带动支腿压入泥土内,采用连接弧板与支腿连接可以根据需要进行连接状态的调整,同时也便于对齿条件进行更换,保证临时定位工作状态的稳定。
17.进一步的,所述连接弧板与支腿同轴设置,所述连接弧板两端延伸有垂直于其轴向的连接板,所述连接板上均开设有供连接销穿过的连接孔,所述齿条块通过连板固定在连接弧板上,所述齿条块沿连接弧板轴向阵列设有多个,所述齿条块对称设在连板两侧。
18.通过采用上述技术方案,连接板和穿设的连接销配合固定连接弧板和支腿,减少连接弧板和支腿间的相对位移,设置连板将齿条块与齿轮件连接,保证定位件相互啮合间不受干扰,保证传动平稳性,并减少稳桩平台在临时定位时的偏移。
19.进一步的,所述连接板和连接弧板间固定有支撑板,所述连接弧板与支腿件还设有弧状紧固卡,所述紧固卡贴合支腿外壁设置。
20.通过采用上述技术方案,支撑板提高连接板与连接弧板的结构强度,提高在下沉过程中的抗击能力,紧固卡贴合支腿外壁保证连接弧板与支腿间连接的紧密性。
21.进一步的,所述支腿底部向外延伸有加固板,所述加固板上垂直设有与支腿侧壁垂直的肋板,所述肋板沿支腿圆周阵列设有多个,所述肋板之间还设有吊耳。
22.通过采用上述技术方案,加固板进一步提高支腿的稳定性并固定稳桩平台的平台主体,为整个稳桩平台提供基础支撑、承受外部载荷,抗冲击且其结构简单,便于沉桩作业;吊耳配合拖轮,可以调整施工作业前支腿的位置,实现作业的初始定位。
23.进一步的,所述gps定位系统包括中央处理单元、gps发射/接收单元、钢桁架倾斜检测传感器和支腿倾斜角检测传感器,所述gps定位系统还与定位件信号连接。
24.通过采用上述技术方案,gps定位系统能够及时检测并调整稳桩平台位置,能够全面自动检测并调整打桩施工作业,其自动化和智能化程度高。
25.综上所述,本实用新型技术方案,具有如下优点:
26.1.本实用新型提供的自定位稳桩平台,设置在漂浮层内的浮箱实现稳桩平台的自浮性,抱桩器和吊装设备的配合能够完成定位柱或单桩的抱桩作业,实现稳桩目的,提高沉桩精度。
27.2.本实用新型提供的自定位稳桩平台,实现在漂浮状态下的定位固定,定位件实现稳桩平台的临时自定位,提高了临时安装作业的工作稳定性,增强了海上作业的机动性。
28.3.本实用新型提供的自定位稳桩平台,增设的gps定位系统能够及时检测并调整稳桩平台位置,配合拖轮可以调整施工作业前支腿的位置,实现作业的初始定位。
附图说明
29.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对
具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
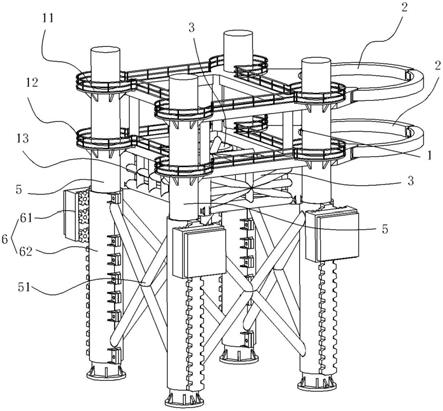
30.图1为本实用新型一种实施方式中提供的一种自定位稳桩平台的整体结构示意图;
31.图2为本实用新型一种实施方式中提供的定位件的局部剖视结构示意图;
32.图3为图2所示的a部的放大结构示意图;
33.图4为本实用新型一种实施方式中提供的支腿底部的局部结构示意图;
34.图5为本实用新型一种实施方式中提供的gps定位系统的结构框图。
35.附图标记说明:
36.1、钢桁架;11、平台层;12、抱桩层;13、漂浮层;2、抱桩器;3、浮箱; 4、gps定位系统;41、中央处理单元;42、gps发射/接收单元;43、钢桁架倾斜检测传感器;44、支腿倾斜角检测传感器;5、支腿;51、加强杆;52、加固板;53、肋板;54、吊耳;6、定位件;61、齿轮件;611、升降齿轮;612、驱动件;62、齿条件;621、齿条块;622、连接弧板;6221、连板;6222、支撑板;6223、紧固卡;623、连接板;624、连接销;6241、连接孔。
具体实施方式
37.以下结合附图和实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
38.一种自定位稳桩平台,如图1所示,钢桁架1呈四方体的空间桁架结构,钢桁架1从上至下依次包括平台层11、抱桩层12和漂浮层13,平台层11和抱桩层12同侧均固定有抱桩器2,漂浮层13内固定有浮箱3,浮箱3阵列设有多个,每个浮箱3上均设有进排水口阀门,设置在漂浮层13内的浮箱3实现稳桩平台的自浮性,钢桁架1四角可拆卸连接有支腿5,支腿5间固定有十字加强杆51,支腿5上还设有部分定位件6,定位件6用于控制支腿5的轴向运动,定位件6包括齿轮件61和齿条件62,对稳桩平台整体结构进行优化设计,在不影响自漂浮状态下实现定位固定,操作简单且施工效率高,定位件6可以适时调整进行稳桩平台的临时自定位,实现临时安装作业的工作稳定性,提高了海上作业的机动性。
39.如图2所示,齿轮件61设在支腿5外侧,齿轮件61包括与齿条件62啮合的升降齿轮611和驱动升降齿轮611转动驱动件612,升降齿轮611轴线与支腿5轴线垂直设置,齿条件62包括齿条块621、连接弧板622、连接板623和连接销624,连接弧板622与支腿5件还设有贴合支腿5外壁的弧状紧固卡6223,紧固卡6223贴合支腿5外壁保证连接弧板622与支腿5间连接的紧密性,升降齿轮611与齿条块621啮合,连接弧板622套设在支腿5外壁上,连接弧板622 两端延伸有垂直于其轴向的连接板623,齿条块621通过连板6221固定在连接弧板622远离连接板623的一侧侧壁,齿条块621沿连接弧板622轴向阵列设有多个且对称设在连板6221两侧,连接销624穿过连接板623并固定连接弧板 622。相互啮合的齿轮件61和齿条件62,其中齿轮件61位置保持不变,需要临时定位时,驱动件612不工作,齿条块621和升降齿轮611啮合,通过支腿 5的自身重力从而将支腿5压入泥土中实现临时定位,齿轮件61起到限位作用;在需要对支腿5进行提升时,驱动件612工作带动升降齿轮611转动,从而支腿5提升并拔出,此时,齿轮件61起到主动功能。
40.如图2和图3所示,连接板623和连接弧板622间固定有支撑板6222,连接板623上均开设有供连接销624穿过的连接孔6241,连接板623和穿设的连接销624配合固定连接弧板622和支腿5,减少连接弧板622和支腿5间的相对位移,支撑板6222提高连接板623与连接弧板622的结构强度,提高在下沉过程中的抗击能力。
41.如图4所示,支腿5底部向外延伸有加固板52,加固板52上垂直设有与支腿5侧壁垂直的三角形肋板53,肋板53沿支腿5圆周阵列设有多个,肋板 53之间还设有吊耳54,加固板52进一步提高支腿5的稳定性并固定稳桩平台的平台主体,为整个稳桩平台提供基础支撑、承受外部载荷,抗冲击且其结构简单,便于沉桩作业;吊耳54配合拖轮,可以调整施工作业前支腿5的位置,实现作业的初始定位。
42.如图5所示,钢桁架1平台上设有gps定位系统4,gps定位系统4包括中央处理单元41、gps发射/接收单元42、钢桁架倾斜检测传感器43和支腿倾斜角检测传感器44,gps定位系统4能够及时检测并调整稳桩平台位置,能够全面自动检测并调整打桩施工作业,其自动化和智能化程度高。
43.本自定位稳桩平台的工作原理和使用方法:在稳桩平台的四根支腿5外侧加装齿条,需要将支腿5下沉进行临时定位时,可以通过支腿5和平台自重将支腿5压入泥土内,稳桩平台上装有gps定位系统4,可以根据系统控制并与拖轮协助,从而操纵支腿5实现作业的初始定位。
44.上述说明示出并描述了本实用新型的优选实施例,如前所述,应当理解本实用新型并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述实用新型构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则都应在本实用新型所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1