一种小型平面钢闸门面板清污机器人
1.本实用新型属于水利设备领域,涉及一种闸门维护保养装置,特别涉及一种弧形钢闸门面板爬行底盘。
背景技术:
2.水工钢闸门是一种控制水位的水工钢构件,是水电站、水库、水闸等水工建筑物的重要构造组成,约占整个水利工程造价的20% 左右,在个别江海湖泊水利工程中甚至会占到一半以上。面板是闸门的主要工作部件,作业面积大,作为一种金属构件,受干湿环境交替、水质、水中浮游藻类以及贻贝类生物等的影响,表面会出现不同程度的泥土污垢、青苔、贻贝等附着,不仅影响美观,而且容易出现腐蚀等现象,长时间会使其结构强度及承载能力下降,加之小型闸门受环境影响大、配套基础设施条件差、管理维护不规范等原因,其损坏程度及运行维护的成本更会增大;闸门面板检测中要求应对被检部位表面进行清污,去除表面附着物、污物、锈皮等,另外对于已经有腐蚀的面板,为了提高使用寿命和安全性需要再涂层,同样需要对腐蚀表面进行预先清污。
3.目前小型闸门面板表面清污仍主要靠人工完成,通过扫帚、刮铲、刮板等简易工具完成,不仅工作效率较低,清污不均匀、不全面,而且需要攀爬护栏(设有交通桥的闸门)、乘船或者搭板(未设有交通桥的闸门)。作业存在安全隐患,工人劳动强度也大,同时增加了养护成本。
技术实现要素:
4.本实用新型的目的在于解决小型平面钢闸门面板的日常维护依靠人工完成,劳动强度大、工作效率低的问题,提供一种小型平面钢闸门面板清污机器人,可在平面钢闸门面板上爬行,进行面板清污,代替人工作业,降低劳动强度并消除安全隐患。
5.本实用新型解决其技术问题所采用的技术方案是:一种小型平面钢闸门面板清污机器人,其特征在于:包括车架,车架的左右两侧分别设有履带爬行模块,车架的前端设有射流清洗模块,车架的后端设有获取钢闸门面板图像信息的摄像头,车架的中部设有转刷清洗模块。
6.操作人员将机器人置于钢闸门面板上,使其吸附在钢闸门面板上并打开车架后端的摄像头,射流清洗模块的水泵通过进水管连接外置于岸边的水箱;操作人员远程操作车架在钢闸门面板上行走至需要清污处,控制射流清洗模块向钢闸门面板喷水或喷清洗液,控制转刷清洗模块贴合钢闸门面板转动刷洗,同时控制车架缓慢向前行走,实现边走、边喷水、边刷洗的清污过程,摄像头获取已清洗位置的图像信息,判断是否需要二次清洗。
7.作为优选,所述履带爬行模块包括设置在车架侧面的履带轮,至少一个履带轮为主动轮,车架上与主动轮对应设置履带电机,履带轮上套设有履带,履带上等间隔嵌设有磁吸块。磁吸块确保履带可以吸附在钢闸门面板上,履带电机为驱动车架行走的动力。
8.作为优选,所述履带轮在车架的同一个侧面设置多个,其中最前端和最后端的履
带轮均为主动轮。主动轮在履带的前后端各设一个,分别作为前行和倒车的驱动源。当动力不足时,也可以同步启动前后端的履带电机同向旋转,提供更大的驱动力,当需要倒车时,主动轮可以在履带电机反转驱动下反向转动。
9.作为优选,所述射流清洗模块包括设置在车架前部的水泵,所述水泵的进口端设有连接外部水源的进水管,水泵的出口端通过喷水管连接有喷嘴,所述喷嘴通过支架固定在车架的前端,喷嘴喷水方向垂直向下。
10.作为优选,所述喷嘴设置多个,各喷嘴在车架前端沿左右方向均匀布置。
11.作为优选,所述摄像头镜头竖直向下设置或向后侧下方倾斜设置。
12.作为优选,所述转刷清洗模块包括设置在车架中部的刷座,刷座下方设置转刷,所述刷座上还设置有驱动转刷的转刷电机。
13.作为优选,所述刷座和车架之间还设有控制刷座升降的升降电机。刷座在车架未进行清洗工作,纯运动模式下升起,减少前行阻力。
14.作为优选,所述转刷电机与转刷的驱动结构为以下方案的一种:
15.方案一,转刷设置一个或多个,每个转刷对应设置有一个转刷电机,转刷电机固定在底座上;
16.方案二,转刷设置多个,各转刷通过同一个转刷电机驱动,底座中部固定一个转刷电机,转刷电机输出端与各转刷上端均使用齿轮传动;
17.方案三,所述底座包括上固定座和下转动座,转刷设置多个并均固定在下转动座上,转刷电机固定在上固定座上并驱动下转动座旋转。
18.作为优选,所述车架上还设置有远程控制模块。
19.本实用新型实现了钢闸门面板的自动清洗,本装置结构简单体型轻巧,方便携带;本装置采用外置水源,水源充足,用射流清洗和转刷刷洗相互结合的清洗模式,可以实现顽固附着物的清理,清污效果好。
附图说明
20.下面结合附图对本实用新型做进一步说明。
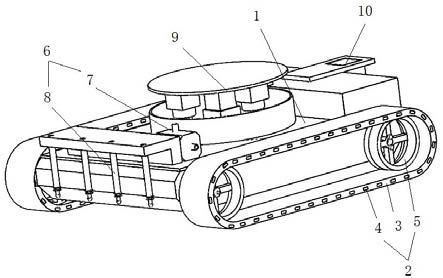
21.图1是本实用新型的一种结构示意图。
22.图2是本实用新型的一种底面结构示意图。
23.图3是本实用新型的一种内部结构示意图。
24.图4是本实用新型的一种转刷清洗模块结构示意图。
25.图5是本实用新型转刷清洗模块位置的车架结构示意图。
26.图中:1、车架,2、履带爬行模块,3、履带,4、磁吸块,5、履带轮,6、射流清洗模块,7、水泵,8、喷嘴,9、转刷清洗模块,10、摄像头,11、转刷,12、履带电机,13、转刷电机,14、升降电机,15、转刷电机轴穿孔。
具体实施方式
27.下面通过具体实施例并结合附图对本实用新型进一步说明。
28.实施例:一种小型平面钢闸门面板清污机器人,如图1所示。本装置包括车架1,车架1的左右两侧分别设有履带爬行模块2,车架的前端设有射流清洗模块6,车架的后端设有
获取钢闸门面板图像信息的摄像头10,车架的中部设有转刷清洗模块9。车架上还设置有远程控制模块,便于操作人员远程操控。操控模式与普通的遥控小汽车类似,均使用不同按键信号控制电机、水泵等设备的启停。
29.履带爬行模块2如图1、3所示,车架1左右两侧的履带爬行模块结构对称。履带爬行模块2包括履带3、履带轮5和履带电机12。履带轮5在车架1的同一个侧面设置两个,分别设置在车架侧面的最前端和最后端,两个履带轮5均为主动轮,车架上对应每个主动轮分别设置履带电机12,履带电机为正反转电机。履带3套设在两个履带轮5上,履带上等间距嵌设有磁吸块4。
30.射流清洗模块6如图1、5所示,射流清洗模块6包括设置在车架前部的水泵7,所述水泵的进口端设有连接外部水源的进水管,水泵的出口端通过喷水管连接有喷嘴8,所述喷嘴通过支架固定在车架的前端,喷嘴喷水方向垂直向下。喷嘴8设置四个,各喷嘴在车架1前端沿左右方向均匀布置。进水管和喷水管均为橡胶软管,在图中未表示。
31.转刷清洗模块9如图1
‑
5所示,车架1的中部设置圆形安装位,圆形安装位呈矩形开设有四个转刷电机轴穿孔15。车架1中部的圆形安装位上嵌设有刷座,刷座底面中部与车架1的圆形安装位上表面之间设有升降电机14。刷座底面环绕升降电机14均匀设置有四个转刷电机13,转刷电机的输出轴穿过转刷电机轴穿孔15至车架1的下方并分别连接有转刷11。
32.操作人员将机器人置于钢闸门面板上,使其吸附在钢闸门面板上并打开车架后端的摄像头,射流清洗模块的水泵通过进水管连接外置于岸边的水箱;操作人员远程操作车架在钢闸门面板上行走至需要清污处,控制射流清洗模块向钢闸门面板喷水或喷清洗液,控制转刷清洗模块贴合钢闸门面板转动刷洗,同时控制车架缓慢向前行走,实现边走、边喷水、边刷洗的清污过程,摄像头获取已清洗位置的图像信息,判断是否需要二次清洗。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1