压实机的制作方法
1.本实用新型涉及压实机,具体地为板式压实机(plate compactor)。
背景技术:
2.板式压实机包括板,该板被振动以压实土壤或其他松散材料。
技术实现要素:
3.在第一方面,本实用新型提供了一种压实机,包括:框架;联接到框架的板;可旋转地支撑在板上的轴;偏心块,其被布置为在轴上旋转以及被配置为使板响应偏心块的旋转而相对于框架振动,并且还被配置为使压实机沿第一线性方向和沿与第一线性方向相反的第二线性方向移动;细长手柄,其联接到框架并且具有抓握部分;以及数字用户界面,其联接到细长手柄并且被配置为在第一运动状态和第二运动状态之间控制压实机的运动,在第一运动状态,压实机沿第一线性方向移动,在第二运动状态,压实机沿第二线性方向移动。
4.可选地,数字用户界面还被配置为在第一运动状态或第二运动状态以及空档状态之间控制压实机的运动,在空档状态,压实机不在第一运动状态或第二运动状态下运动。
5.可选地,数字用户界面包括速度控制面板。可选地,速度控制面板被配置为在第一运动状态或第二运动状态中的任一个中以高速模式和低速模式选择性地操作压实机。
6.可选地,速度控制面板包括高速选择器和低速选择器,用于分别选择高速模式和低速模式。
7.可选地,数字用户界面包括方向控制面板。可选地,方向控制面板被配置为在第一运动状态或第二运动状态中的一个下选择性地操作压实机。
8.可选地,方向控制面板包括正向选择器和反向选择器,用于分别选择第一运动状态和第二运动状态。
9.可选地,方向控制面板包括空档选择器,空档选择器被配置为选择空档状态,在空档状态,压实机不在第一运动状态或第二运动状态下运动。
10.可选地,框架与板振动隔离。
11.可选地,压实机还包括被配置为旋转轴的电机。
12.可选地,压实机还包括联接到框架的电池,并且电池被配置为向电机提供电力。
13.在第二方面,本实用新型提供了一种压实机,包括:板;可旋转地支撑在板上的轴;被配置为旋转轴的电机;偏心块,其被布置为在轴上旋转并且被配置为使板响应偏心块的旋转而振动,并且还配置成实现压实机沿第一线性方向和沿与第一线性方向相反的第二线性方向的运动;以及数字用户界面。数字用户界面包括方向控制面板,其被配置为选择压实机沿第一线性方向和沿第二线性方向的运动;以及速度控制面板,其被配置为在第一线性方向或第二线性方向中的任一个中在高速模式和低速模式之间进行选择。
14.可选地,方向控制面板包括:正向选择器,其被配置为以对应于第一线性方向的第一运动状态操作压实机;以及反向选择器,其被配置为以对应于第二线性方向的第二运动
状态操作压实机。
15.可选地,方向控制面板还包括:空档选择器,其被配置为选择空档状态,在空档状态,压实机不在第一运动状态或第二运动状态下运动。
16.可选地,空档选择器位于正向选择器和反向选择器之间。
17.可选地,正向选择器、反向选择器和空档选择器中的每一个都是电容式触摸按钮。
18.可选地,速度控制面板包括高速选择器和低速选择器,用于分别选择高速模式和低速模式。
19.可选地,压实机被配置为沿第一线性方向或沿第二线性方向在高速模式或低速模式中移动。
20.可选地,高速选择器和低速选择器为电容式触摸按钮。
21.可选地,压实机还包括:框架,其与板振动隔离;以及细长手柄,其联接到框架并且具有抓握部分。
22.可选地,细长手柄在对应于第一线性方向的第一位置和对应于第二线性方向的第二位置之间可移动地联接到框架。
23.可选地,数字用户界面联接到细长手柄。
24.可选地,压实机还包括电池,其联接到框架并且被配置为向电机提供电力。
25.通过考虑以下详细描述和附图,本实用新型的其他特征和方面将变得显而易见。在适当和适用的情况下,本文中关于一个方面或实施例描述的任何特征可以与本文中关于任何其他方面或实施例描述的任何其他特征组合。
附图说明
26.图1是板式压实机的示意性侧视图。
27.图2是图1的板式压实机的示意性俯视图。
28.图3是根据本实用新型一个实施例的板式压实机的示意性俯视图,其中偏心块处于中间位置。
29.图4是图3的板式压实机的示意性俯视图,其中偏心块处于右侧位置。
30.图5是图3的板式压实机的示意性俯视图,其中偏心块处于左侧位置。
31.图6是根据本实用新型一个实施例的图3的板式压实机的旋转轴和偏心块的剖视图。
32.图7是图6的旋转轴的剖视图。
33.图8是图6的偏心块的剖视图。
34.图9是根据本实用新型另一个实施例的板式压实机的示意性俯视图。
35.图10是根据本实用新型另一个实施例的板式压实机的示意性俯视图。
36.图11a是根据本实用新型另一个实施例的板式压实机的示意性侧视图,其中板式压实机沿第一线性方向行进。
37.图11b是图11a的板式压实机的示意性侧视图,其中板式压实机沿第二线性方向行进。
38.图12是图11a的板式压实机的透视图。
39.图13是根据本实用新型另一个实施例的板式压实机的放大示意性俯视图,其中偏
心块处于中间位置并且激振器轴在第一旋转方向上旋转。
40.图14是图13的板式压实机的放大示意性俯视图,其中偏心块处于右侧位置并且激振器轴在第一旋转方向上旋转。
41.图15是图13的板式压实机的放大示意性俯视图,其中偏心块处于左侧位置并且激振器轴在第一旋转方向上旋转。
42.图16是图13的板式压实机的放大示意性俯视图,其中偏心块处于中间位置并且激振器轴在第二旋转方向上旋转。
43.图17是图13的板式压实机的放大示意性俯视图,其中偏心块处于左侧位置并且激振器轴在第二旋转方向上旋转。
44.图18是图13的板式压实机的放大示意性俯视图,其中偏心块处于右侧位置并且激振器轴在第二旋转方向上旋转。
45.图19是根据本实用新型另一个实施例的板式压实机的示意性侧视图,其中板式压实机沿第一线性方向行进。
46.图20是图19的板式压实机的示意性侧视图,其中板式压实机沿第二线性方向行进。
47.图21是图19的板式压实机的控制单元组件的侧视图。
48.图22是图21的控制单元组件(其中一些部分被移除)的透视图。
49.图23是图21的控制单元组件(其中一些部分被移除)的部分分解透视图。
50.图24是图21的控制单元组件的局部剖视图。
51.图25是图21的控制单元组件(其中一些部分被移除)的透视图,其示出了在第一方向上被致动的杠杆。
52.图26是图21的控制单元组件(其中一些部分被移除)的透视图,其示出了在第二方向上被致动的杠杆。
53.图27是适于与图19的板式压实机一起使用的数字用户界面的透视图。
54.图28是描述图27的数字用户界面的操作的流程图。
具体实施方式
55.在详细解释本实用新型的任何实施例之前,应当理解,本实用新型的应用不限于在以下描述中阐述或在附图中示出的构造细节和部件布置。本实用新型能够具有其他实施例,并且能够以各种方式实践或实施。另外,应当理解,本文所使用的措词和术语是出于描述的目的,而不应被认为是限制性的。
56.如图1和图2所示,典型的气动单向板式压实机10包括板14,具有偏心块(eccentric mass)22以振动板14的激振器(exciter)18,以及通过输出皮带轮30和皮带34驱动激振器18的燃气发动机26。燃气发动机26安装在平台36上,该平台通过隔振器38或阻尼器与激振器18振动隔离 (vibrationally isolated),以保护燃气发动机26免受过度振动。手柄40通过另一个隔振器41或阻尼器联接到平台36。
57.参考图2,偏心块22位于板14的前部42处以提供压实力并且沿向前行进方向驱动压实机10。压实机10不包括轮子并且在操作期间板的整个底部46都保持与地面接触。由于激振器18和偏心块22在板14上横向地居中,因此在操作期间压实机10只能够在其自身动力
下沿直线移动。为了使压实机10转动,操作者必须在激振器18仍在试图拉动板14向前时拖动板14转圈。因此,单向板式压实机10较重并且较难操纵。
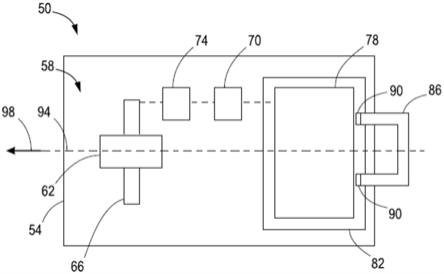
58.图3至图5示出了板式压实机50的一个实施例,其包括板54,具有偏心块62的激振器58,偏心块62可在激振器轴66上旋转以振动板54,以及用于驱动激振器58的电机70。在一些实施例中,电机70直接驱动激振器 58,或者如图3至图5的实施例所示的通过中间驱动装置74(例如转动激振器轴66的一端的皮带,链条或齿轮箱)来驱动激振器58。电池(例如,电池组78)为电机70提供电力。电池组78安装在与电机70振动隔离的平台 82上。同样,手柄86通过附加的隔振器90或阻尼器联接到平台82并与平台82振动隔离。
59.如图3所示,偏心块62以允许偏心块62在其与激振器轴66一起旋转时沿激振器轴66平移的方式联接到激振器轴66。当偏心块62在与激振器轴 66一起旋转时偏心块62与将板54平分的中心平面94对齐时,偏心块62 使板式压实机50沿直线向前行进方向移动,如图3中的箭头98所示。当旋转的偏心块62在与激振器轴66一起旋转时移动到中心平面94的右侧时,板式压实机50将向前和向左移动,如图4中的箭头102所示。当旋转的偏心块62在与激振器轴66一起旋转时移动到中心平面94的左侧时,板式压实机50将向前和向右移动,如图5中的箭头104所示。
60.图6和图7示出了一个实施例,其中图3至图5的板式压实机50的偏心块62可沿激振器轴66平移。具体地,在图6和图7的实施例中,激振器轴66包括纵向孔106并且包括从孔106延伸并穿过激振器轴66的外表面114 的槽110。如图8所示,滑动键118包括布置在孔106中的基部122和径向向外延伸穿过槽110以与偏心块62中的凹槽130或键槽接合的突片126。线缆或联动装置134布置在激振器轴66的一端以允许操作者控制滑动键118 和激振器轴66上的偏心块62的横向位置,从而允许操作者根据需要使板式压实机50转动,如图4和图5所示。
61.图9示出了板式压实机1050的另一个实施例,其与图3至图5的实施例相同,其中与板式压实机50相同的特征利用相同的附图标记加“1000”表示。但是,作为单个可平移的偏心块62的替代,在图9的实施例中,第一和第二偏心块138、142分别与布置在激振器轴1066的相对端的第一和第二轴端146、150联接以旋转,并且选择性地与激振器轴1066联接以旋转。具体地,可由操作者机械地或电子地控制的第一和第二离合器154、158分别布置在激振器轴1066与第一和第二轴端146、150之间。
62.第一和第二离合器154、158允许第一和第二轴端146、150中的一个并且因此偏心块138、142中的一个与激振器轴1066一起旋转,而第一和第二轴端146、150中的另一个以及因此第一和第二偏心块138、142中的另一个保持静止并且不随激振器轴1066旋转。如果第一和第二离合器154、158同时接合,则第一和第二轴端146、150两者以及偏心块138、142两者都将与激振器轴1066一起旋转,并且压实机1050将沿直线向前行进方向移动,如箭头1098所示。如果仅第一离合器154接合,则仅第一轴端146以及因此仅第一偏心块138将与激振器轴1066一起旋转,并且压实机1050将向前移动并且也在与第一轴端146相对的方向上转动,如箭头1102所示。如果仅第二离合器158接合,则仅第二轴端150以及因此仅第二偏心块142将与激振器轴1066一起旋转,并且板式压实机1050将向前移动并且也在与第二轴端150相对的方向上转动,如箭头1104所示。图9的实施例还允许第一和第二偏心块138、142彼此同相或异相地旋转,这允许压实机50执行“点压实”(“spot compaction”),即在板式压实机1050停留在一个地方时进行压实。
63.与图9的实施例不同,可逆板式压实机包括两个偏心块,它们不位于同一轴线或同一激振器轴上。在可逆板式压实机中,一个偏心块位于板的前部,另一个位于板的后部。可逆板式压实机的偏心块沿相反的方向旋转,并且它们之间的相位可以改变,以改变它们所产生的净力的方向。这允许可逆板式压实机向前、向后移动或停留在一个地方,但不允许如图9的实施例中所示的任何转动。
64.图10示出了板式压实机2050的另一个实施例,其与图3至图5的实施例相同,其中与板式压实机50相同的特征利用相同的附图标记加“2000”表示。在图10的实施例中,两个独立的第一和第二电机166、170布置在板 2054的第一和第二侧174、178上并且分别驱动分开的第一和第二偏心块 182、186。如果第一和第二电机166、170都被启动,则第一和第二偏心块 182、186都将旋转并且压实机2050将沿直线移动,如箭头2098所示。
65.如果仅启动第一电机166,则仅第一偏心块182将旋转并且压实机2050 将向前移动并且沿与板2054的第一侧174相对的方向转动,如箭头2102所示。如果仅启动第二电机170,则仅第二偏心块186将旋转并且板式压实机 2050将向前移动并且沿与板2054的第二侧178相对的方向转动,如箭头2104 所示。在图10的实施例中,第一和第二偏心块182、186可以彼此异相地旋转以执行“点压实”,即在压实机2050停留在一个地方时进行压实。第一和第二偏心块182、186也可以在不同方向上旋转,允许板式压实机2050在一个地方转动而不向前移动,从而提供更高水平的可操纵性。
66.通过使用激振器58、1058、2058来向板54、1054、2054施加振动并且帮助转动板式压实机50、1050、2050,与单向板式压实机10相比,图3至图10中所示的实施例的板式压实机50、1050、2050改进了可操纵性,而不需要任何附加的部件来实现该附加的性能。
67.图11a、图11b和图12示出了板式压实机190的另一个实施例,其包括板194和安装到板194的激振器198。尽管板194被示意性地示出为单个主体,但是板194可以包括多个刚性地连接的部件的组合,其有助于使压实机190在待压实的工作表面上滑动。
68.激振器198包括具有激振器皮带轮的激振器轴202和偏心块210。板式压实机190还包括通过隔振器或阻尼器(例如弹簧218)与底板194振动隔离的框架214。驱动组件222安装到框架214上并且包括电机226,可选的齿轮箱,电机或齿轮箱的输出轴,以及联接成与输出轴一起旋转的驱动皮带轮。电池组234也安装到框架214并被配置为向电机226以及一组被配置为控制电机226的操作的控制电子设备238(示意性示出)提供电力。
69.用于操纵板式压实机190的手柄242在第一位置(图11a)和第二位置 (图11b)之间可移动地联接到框架214,以允许用户在握住手柄242的同时走在板式压实机190后面,而不管板式压实机的运动方向190。驱动组件 222通过布置在驱动皮带轮和激振器皮带轮之间的皮带246来驱动激振器 198。在其他实施例中,电机226直接联接到板194和激振器198,并且直接驱动激振器198(没有任何中间的齿轮箱或皮带)。驱动组件222被配置为在第一旋转方向250(图11a)和与第一旋转方向250相反的第二旋转方向254 (图11b)上转动激振器轴202。
70.在操作中,板式压实机190的运动方向由激振器轴202的旋转方向决定。如图11a所示,当手柄242被握住在第一位置时,控制电子设备238用于在使激振器轴202在第一旋转方向250上旋转的方向上转动驱动组件222,从而使底板194振动并且沿第一线性方向258移动板式压实机190,同时压实底板194下方的地面。在沿第一线性方向移动一段时间后,可能需
要反转板式压实机190的方向。因此,手柄242被移动到第二位置(图11b)以及被握住,并且控制电子设备238用于在使激振器轴202在第二旋转方向254上旋转的方向上转动驱动组件222。激振器轴202在第二旋转方向254上的旋转使底板194振动并使板式压实机190在与第一线性方向258相反的第二线性方向262上移动,同时压实底板194下方的地面。
71.有利地,板式压实机190仅包括单个激振器198以促进板式压实机190 沿第一线性方向258和沿第二线性方向262两者上的运动,从而使板式压实机190成为仅具有单个激振器198的双向板式压实机。与图11a、图11b和图12的实施例不同,某些现有技术的可逆板式压实机需要两个偏心块来实现双向运动。例如,在某些现有技术的可逆板式压实机中,一个偏心块位于板的前部,而另一个偏心块位于板的后部。
72.图13至图18示出了板式压实机190’的另一个实施例,其与板式压实机190相似(其中相同的部件用相同的附图标记加撇号表示),并且具有以下所解释的不同之处。在图13至图18的实施例中,偏心块210'以允许偏心块210'在其与激振器轴202'一起旋转时沿激振器轴202'平移的方式联接到激振器轴202'(以与偏心块62可以沿板式压实机50的激振器轴66平移相同的方式)。
73.因此,当偏心块210'与激振器轴202'一起在第一旋转方向上旋转时偏心块210'与将板194'平分的中心平面266对齐时,偏心块210'使板式压实机190' 沿第一线性方向258'(即向前方向)移动,如图13所示。当旋转的偏心块 210'在与激振器轴202'一起在第一旋转方向上旋转时移动到中心平面266的右侧(以站在图14的右侧的参考系)时,板式压实机190'将向前和向左移动,如图14中的箭头270所示。当旋转的偏心块210'在与激振器轴202'一起在第一旋转方向上旋转时移动到中心平面266的左侧(以站在图15的右侧的参考系),板式压实机190'将向前和向右移动,如图15中的箭头274所示。
74.此外,当偏心块210'与激振器轴202'一起在第二旋转方向上旋转时偏心块210'与中心平面266对齐时,偏心块210'使板式压实机190'沿第二线性方向262'(即反向或向后方向)移动,如图16所示。当旋转的偏心块210'在与激振器轴202'一起在第二旋转方向上旋转时移动到中心平面266的左侧 (以站在图17的左侧的参考系)时,板式压实机190'将向后和向右移动,如图17中的箭头278所示。当旋转的偏心块210'在与激振器轴202'一起在第二旋转方向上旋转时移动到中心平面266的右侧(以站在图18的左侧的参考系)时,板式压实机190'将向后和向左移动,如图18中的箭头282所示。
75.因此,图13至图18的板式压实机190'有利地在仅具有单个激振器198' 的情况下允许双向行进,并且在向前和向后两个方向上都具有转向能力。
76.图19和图20示出了板式压实机190,其进一步包括用于控制板式压实机190的操作的用户界面(ui)300。ui 300被布置为:在手柄242在图19 和图20所示的第一和第二位置之间移动时,由操作者根据操作者的参考系直观地致动。图19示出了位于第一位置的手柄242和在第一或正向方向308 上枢转的ui 300的杠杆304。正向方向308对应于激振器轴202在第一旋转方向250上的旋转,以及板式压实机190沿第一线性方向258的运动。以站在手柄242后面的操作者的参考系,杠杆304的正向方向308被感知为向前,即,作为杠杆304远离操作者的运动并且对应于板式压实机190远离操作者的运动。图20示出了移动到第二位置的手柄242并且在第二或反向方向312 上枢转的ui 300的杠杆304。反向方向312对应于激振器轴202在第二旋转方向254上的旋转,以及板式压实机190沿第二线性方向262的运动。在
手柄242处于第二位置时,以站在手柄242后面的操作者的参考系,反向方向 312仍然被感知为向前,即,作为杠杆304远离操作者的运动并且对应于板式压实机190远离操作者的运动。
77.手柄242还包括与框架214相对的位于手柄242的远端的抓握部分313。当手柄242处于第一位置(图19)并且板式压实机190沿第一线性方向258 移动时,抓握部分313跟随在板194后面。即,当手柄242处于第一位置并且压实机190沿第一线性方向258移动时,抓握部分313在板194的后面。当手柄242处于第二位置(图20)并且板式压实机190沿第二线性方向262 移动时,抓握部分313同样跟随在板194后面。即,当手柄242处于第二位置并且压实机190沿第二线性方向262移动时,抓握部分313在板194的后面。
78.继续参考图19和图20,ui 300控制压实机190在静止状态、第一运动状态和第二运动状态之间的运动。在静止状态,板式压实机190不沿第一或第二线性方向258、262移动。在第一运动状态,压实机190沿第一线性方向258移动。在第二运动状态,压实机190沿第二线性方向262移动。
79.手柄242限定了纵向手柄轴线314。杠杆304限定了纵向杠杆轴线315 并且可绕垂直于纵向手柄轴线314延伸的枢转轴线324枢转。随着杠杆304 绕枢转轴线324枢转,ui 300在静止状态、第一运动状态和第二运动状态之间切换压实机190的状态。在杠杆304的关闭位置328(图21),板式压实机190处于静止状态并且纵向杠杆轴线315平行于纵向轴线314延伸。当杠杆304从关闭位置328沿正向方向308(图19)枢转时,ui 300将板式压实机190切换到第一运动状态。当杠杆304从关闭位置328沿反向方向312(图 20)枢转时,ui 300将板式压实机190切换到第二运动状态。
80.图21至图26图示了体现为控制单元组件316的ui 300,其包括杠杆 304,杠杆304可枢转以控制压实机190的启动,压实机190沿第一和第二线性方向258、262的移动,以及移动速度。参考图21,杠杆304可相对于控制单元组件316的壳体320绕枢转轴线324枢转。在图21中,杠杆304 被示为处于关闭位置328,在该位置,电机226被停用并且激振器轴202不旋转。杠杆304可以从关闭位置328沿第一或正向方向308枢转以启动电机 226。从关闭位置328沿正向方向308枢转杠杆304将使激振器轴202在第一旋转方向250上旋转,使得板式压实机190沿第一线性方向258移动。杠杆304还可以从关闭位置328沿第二或反向方向312枢转以启动电机226。从关闭位置328沿反向方向312枢转杠杆304将使激振器轴202在第二旋转方向上254旋转,使得板式压实机190沿第二线性方向262移动。在一些实施例中,在正向和反向308、312之间切换杠杆304使电机226本身的旋转方向反转。
81.图21还示出了多个正向和反向位置,其中杠杆304可以设置在这些位置以使板式压实机190沿第一线性方向258和第二线性方向262以不同的速度移动。具体地,杠杆304可枢转至第一正向位置或正向慢速位置332,这使板式压实机190以第一速度沿第一线性方向258运动。杠杆304还可枢转至第二正向位置或正向快速位置336,这使板式压实机190以大于第一速度的第二速度沿第一线性方向258运动。类似地,杠杆304可枢转至第一反向位置或反向慢速位置340,这使板式压实机190以第三速度沿第二线性方向 262运动。杠杆304还可枢转至第二反向位置或反向快速位置344,这使板式压实机190以大于第三速度的第四速度沿第二线性方向262运动。尽管仅描述了两个正向位置332、336和两个反向位置340、344,但是杠杆304能够具有额外的正向和反向位置以提供对压实机190操作的速度的进一步调
节。在其他实施例中,杠杆304能够在向前和向后方向308、312上平滑调节而没有任何离散的正向和反向位置。在进一步的实施例中,杠杆304可以仅处于关闭位置328、正向快速位置336和反向快速位置344,而省略正向慢速位置332和反向慢速位置340。
82.参考图22,控制单元组件316还包括第一或开/关微动开关348,第二或正向/反向微动开关352和电位计356。开/关微动开关348可操作以控制电机226的启动。开/关微动开关348包括第一臂360,该第一臂360可在伸出位置(图22)和缩回位置(图25和图26)之间移动,在伸出位置,开/ 关微动开关348打开并且电机226被停用,在缩回位置,开/关微动开关348 闭合并且电机226被允许启动。正向/反向微动开关352可操作以控制激振器轴202的旋转方向,使得板式压实机190在沿第一线性方向258和沿第二线性方向262之间改变运动方向。正向/反向微动开关352包括第二臂364,该第二臂364可在伸出位置(图25)和缩回位置(图26)之间移动,在伸出位置,正向/反向微动开关352打开并且激振器轴202在第一旋转方向上250 旋转(图19),在缩回位置,正向/反向微动开关352闭合并且激振器轴202 在第二旋转方向上250上旋转(图20)。电位计356可操作以控制激振器轴 202的旋转速度,该速度对应于板式压实机190沿第一线性方向258或沿第二线性方向262移动的速度。在一些实施例中,电位计356产生控制电机226 本身的旋转速度的速度信号。
83.参考图22和图23,杠杆304包括支撑在壳体320内的大体圆柱形的毂部分368,手柄部分372,以及在毂部分368和手柄部分372之间延伸的细长连接部分376。第一和第二轴部分380、384从毂部分368横向地向外延伸并限定枢转轴线324,杠杆304绕该枢转轴线324相对于壳体320旋转。第一轴部分380被支撑在由电位计356限定的带键孔(keyed aperture)388内。当杠杆304绕枢转轴线324枢转时,第一轴部分380致动电位计356以调节激振器轴202的旋转速度。
84.毂部分368限定圆柱形外表面392,形成在外表面392中的第一凹槽或第一凸轮轮廓396,以及形成在外表面392中的第二凹槽或第二凸轮轮廓 400。如图22所示,当杠杆304位于关闭位置328时,第一凸轮轮廓396定位成与连接部分376相对180度并且与开/关微动开关348的第一臂360接合。当杠杆304在关闭位置328、正向慢速位置332和正向快速位置336之间旋转时,第二凸轮轮廓400与正向/反向微动开关352的第二臂364接合。
85.参考图22和图24,杠杆304支撑面向壳体320的一部分的制动器404 和将制动器404朝向壳体320偏置的弹簧408。制动器404可与限定在壳体320中并设置在对应于关闭位置328、正向慢速位置332、正向快速位置336、反向慢速位置340和反向快速位置344的位置处的凹坑或凹槽412接合。当杠杆304枢转至上述位置中的一个时,制动器404接合相应的凹槽412以将杠杆304可释放地固定在选定的位置。
86.参考图22、图25和图26,现在将描述控制单元组件316的操作。图22 显示了控制单元组件316,其中杠杆304位于关闭位置328。在关闭位置328,开/关微动开关348的第一臂360处于伸出位置并延伸到第一凸轮轮廓396 中。因此,开/关微动开关348打开并且电机226被停用。正向/反向微动开关352的第二臂364同样处于伸出位置并且位于第二凸轮轮廓400内。
87.图25示出了杠杆304从关闭位置328在正向方向308上朝向正向快速位置336枢转。第一凸轮轮廓396旋转离开第一臂360,使得第一臂360接合毂部分368的圆柱形外表面392,从而使第一臂360移动到缩回位置。当第一臂360处于缩回位置时,开/关微动开关348闭合
并且电机226被允许启动。第二臂364仍然位于第二凸轮轮廓400内并且正向/反向微动开关352 保持打开,对应于激振器轴202在第一旋转方向250上的旋转。电位计356 由第一轴部分380致动以随着杠杆304朝向正向快速位置行进而增加激振器轴202的旋转速度。
88.图26示出了杠杆304从关闭位置328在反向方向312上朝向反向快速位置344枢转。第一凸轮轮廓396旋转离开第一臂360,使得第一臂360接合毂部分368的圆柱形外表面392,从而使第一臂360移动到缩回位置。当第一臂360处于缩回位置时,开/关微动开关348闭合并且电机226被允许启动。第二凸轮轮廓400也旋转离开第二臂364,使得第二臂364接合毂部分 368的圆柱形外表面并移动到缩回位置。当第二臂364处于缩回位置时,正向/反向微动开关352闭合,对应于激振器轴202在第二旋转方向254上的旋转。电位计356由第一轴部分380致动以随着杠杆304朝向反向快速位置行进而增加激振器轴202的旋转速度。
89.图27描绘了根据本实用新型另一个实施例的用于控制板式压实机190 的操作的数字用户界面(dui)300b。dui 300b是以上所述和图19和图20 中描绘的用户界面300的替代。类似于ui 300,dui 300b被布置为由操作者直观地致动。参考图27,dui 300b在第一侧包括方向控制面板416。方向控制面板416具有沿板式压实机190的行进方向定向的三个选择器布置。第一个选择器是正向选择器420。从操作者的角度来看,正向选择器420是方向控制面板416上位于最前面的选择器。正向选择器420可以包括通常指向向前行进方向并指示选择器为正向选择器420的箭头或其他标记。方向控制面板416上的第二个选择器是反向选择器424。从操作者的角度来看,反向选择器424是方向控制面板416上位于最后面的选择器。反向选择器424可以通常指向向后行进方向并指示选择器为反向选择器420的箭头或其他标记。设置在正向选择器420和反向选择器424之间的是第三个选择器,即空档选择器(neutral selector)428。空档选择器428还包括指示其为空档选择器428的标记;然而,没有指示行进方向。
90.继续参考图27,dui 300b还包括速度控制面板432,其具有第一高速选择器436和第二低速选择器440。
91.用于方向控制面板416和速度控制面板432的选择器420、424、428、 436、440可以是触觉选择器、电容式触摸选择器或本领域技术人员已知的其他类似的选择器类型。
92.图28的流程图描述了通过dui 300b对板式压实机190的控制。在按压启用选择器(arm selector)444后,板式压实机190自动进入空档状态。此时,板式压实机190正在等待操作者在dui 300b上的输入。如果操作者选择高速选择器436,则压实机190将进入高速模式。相反,如果操作者选择低速选择器440,则板式压实机190将进入低速操作模式。在选择操作模式之后,操作者可以选择驱动压实机190的方向。为了在第一运动状态和沿第一线性方向向前驱动压实机190,操作者按压正向选择器420。为了在第二运动状态和沿相反的第二线性方向向后驱动压实机190,操作者必须按压反向选择器424。为了停止压实机190的运动,操作者按压空档选择器438,以恢复压实机190停止移动的空档状态。按压解除启用选择器(disarmselector)448以解除压实机190的启用。在一些实施例中,启用选择器444 和解除启用选择器448组合成单个选择器,其中第一次按压将“启用”压实机190,第二次按压将“解除启用”压实机190。
93.dui 300b还可用于除了板式压实机之外的其他类型的振动动力设备或其他类型的电池供电设备。
94.在权利要求中阐述了本实用新型的各种特征。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1