挖掘机回转角度与动臂提升互相匹配的液压系统的制作方法
:
1.本实用新型属于工程机械技术领域,具体地说,尤其涉及一种挖掘机回转角度与动臂提升互相匹配的液压系统。
背景技术:
2.随着国内矿山、基建等工程的规范化,工程机械的目标市场越来越细分,使用工况越来越复杂,施工范围越来越广,实施工期越来越短,整机工作时间越来越长,司机操作强度越来越大,而挖掘机回转角度与动臂提升现有的技术方案为:
3.挖掘机动臂提升与回转复合动作时:先导手柄ⅰ做左回转或右回转动作时,给5pa3或5pb3提供先导压力,推动回转阀杆向右移动或向左移动,从而使p1泵的油经回转阀杆的控制,进入回转马达,驱动挖掘机回转;先导手柄ⅱ做动臂提升动作时,给4pa2、5pb2同时提供先导压力,推动动臂ⅰ阀杆向右移动,从而使p2泵的油经动臂ⅰ阀杆的控制,进入动臂油缸的大腔,驱动动臂的举升;同时,还推动动臂ⅱ阀杆向左移动,从而使p1泵的油经动臂ⅱ阀杆的控制,也进入动臂油缸的大腔,一起驱动动臂的举升。
4.而在实际工况中,由于经常同时需要一边做挖掘机的回转动作,一边进行动臂的举升动作,尤其是挖掘机在矿区装车的工况下,由于需要的回转的角度较小,例如回转60
°
左右,而物料举升的高度较高,例如举升4米左右,这就需要在挖掘机回转60
°
的过程中,同时将物料举升4米的高度进行装车。p1泵及p2泵输出压力主要由工作装置总重量、油缸缸径、挖掘物料的重量决定的;而回转马达在启动之后,所需要的驱动压力较低,这就使得在重载工况下p1泵对回转马达提供的流量较大,回转迅速变快,而动臂举升变慢,导致挖掘回转先转到制定的60
°
,而动臂尚未举升到指定的4米高度,需要继续等待动臂的举升,从而影响装车效率。为保证挖掘机回转单动作过程中回转的速度,回转先导手柄在最大位置时,回转阀杆的开度、回转马达的流量都较大,这就导致在小回转角度的挖掘机回转加动臂举升过程中,回转先导手柄及动臂先导手柄都在最大位置时,回转动作的速度要远快于动臂举升的速度。
技术实现要素:
5.本实用新型要解决的技术问题是克服现有技术的不足,提供了一种挖掘机回转角度与动臂提升互相匹配的液压系统,其可以在回转速度要求不高的作业情况下,减少回转所需要的流量,增加动臂提升所需要的流量,从而提高动臂的举升速度,降低挖掘机司机的操作强度及提升挖掘机的作业效率。
6.为了实现上述目的,本实用新型是采用以下技术方案实现的:
7.一种挖掘机回转角度与动臂提升互相匹配的液压系统,包括先导手柄ⅰ、先导手柄ⅱ、控制器和主控阀,还包括比例电磁阀和压力传感器,所述压力传感器分别与先导手柄ⅰ、先导手柄ⅱ和控制器连接,所述主控阀分别与先导手柄ⅱ和比例电磁阀连接,所述比例电磁阀的信号端还与控制器连接。
8.优选地,所述压力传感器包括压力传感器ⅰ、压力传感器ⅱ和压力传感器ⅲ,所述压力传感器ⅰ分别与先导手柄ⅱ和控制器连接,压力传感器ⅱ分别与先导手柄ⅰ和控制器连接,压力传感器ⅲ分别与先导手柄ⅰ和控制器连接。
9.优选地,所述主控阀包括回转阀杆、动臂ⅰ阀杆和动臂ⅱ阀杆,比例电磁阀包括比例电磁阀ⅰ和比例电磁阀ⅱ,所述回转阀杆的先导油口5pb3与比例电磁阀ⅰ连接,回转阀杆的先导油口5pa3与比例电磁阀ⅱ连接,先导手柄ⅱ分别与动臂ⅱ阀杆的先导油口5pb2、动臂ⅰ阀杆的先导油口4pa2、动臂ⅰ阀杆的先导油口4pb2连接。
10.与现有技术相比,本实用新型的有益效果是:
11.1、通过压力传感器,采集动臂提升的先导手柄ⅱ与回转的先导手柄ⅰ的先导压力值,通过控制器处理,当动臂提升的先导手柄ⅱ、回转的先导手柄ⅰ同时产生压力值时,则判定动作为:动臂提升与回转同时进行的复合动作;当满足此条件时,控制器将采集到的回转先导手柄ⅰ的先导压力,按照一定的比例将回转先导压力进行降低,进而通过比例电磁阀输出降低后的二次先导压力,减小回转阀杆的最大开度,进一步减少经过回转阀杆的最大流量,增加经过动臂ⅱ阀杆的流量,从而实现对挖掘机最大回转速度与动臂举升速度的匹配;
12.2、当回转先导手柄ⅰ动作,而动臂举升的先导手柄ⅱ不动作,即不产生动臂举升的先导压力时,控制器将采集到的回转先导手柄ⅰ的先导压力等值地输入到比例电磁阀,比例电磁阀等值地输出二次先导压力,即动臂不举升的过程中,不再限制回转先导手柄ⅰ输出的先导压力,从而可以保证回转单动作的速度。
附图说明:
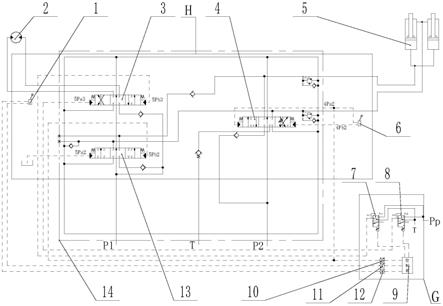
13.图1为本实用新型的液压原理图;
14.图2为图1中h处的局部放大图;
15.图3为图1中g处的局部放大图。
16.图中:1、先导手柄ⅰ;2、回转马达;3、回转阀杆;4、动臂ⅰ阀杆;5、动臂油缸;6、先导手柄ⅱ;7、比例电磁阀ⅰ;8、比例电磁阀ⅱ;9、控制器;10、压力传感器ⅰ;11、压力传感器ⅱ;12、压力传感器ⅲ;13、动臂ⅱ阀杆;14、主控阀。
具体实施方式:
17.下面通过具体实施例并结合附图对本实用新型作进一步说明。
18.实施例1:
19.如图1-3所示,一种挖掘机回转角度与动臂提升互相匹配的液压系统,包括先导手柄ⅰ1、先导手柄ⅱ6、控制器9、主控阀14、比例电磁阀和压力传感器,所述压力传感器分别与先导手柄ⅰ1、先导手柄ⅱ6和控制器9连接,所述主控阀14分别与先导手柄ⅱ6和比例电磁阀连接,所述比例电磁阀的信号端还与控制器9连接。
20.实施例2:
21.一种挖掘机回转角度与动臂提升互相匹配的液压系统,所述压力传感器包括压力传感器ⅰ10、压力传感器ⅱ11和压力传感器ⅲ12,所述压力传感器ⅰ10分别与先导手柄ⅱ6和控制器9连接,压力传感器ⅱ11分别与先导手柄ⅰ1和控制器9连接,压力传感器ⅲ12分别与先导手柄ⅰ1和控制器9连接。
22.所述主控阀14包括回转阀杆3、动臂ⅰ阀杆4和动臂ⅱ阀杆13,比例电磁阀包括比例电磁阀ⅰ7和比例电磁阀ⅱ8,所述回转阀杆3的先导油口5pb3与比例电磁阀ⅰ7连接,回转阀杆3的先导油口5pa3与比例电磁阀ⅱ8连接,先导手柄ⅱ6分别与动臂ⅱ阀杆13的先导油口5pb2、动臂ⅰ阀杆4的先导油口4pa2、动臂ⅰ阀杆4的先导油口4pb2连接。
23.所述回转阀杆3与回转马达2连接,动臂油缸分别与动臂ⅰ阀杆4和动臂ⅱ阀杆13连接,动臂ⅱ阀杆13的进油口与泵p1连接,动臂ⅰ阀杆4的进油口与泵p2连接。其他部分与实施例1相同。
24.当挖掘机动臂提升与回转复合动作时:
25.先导手柄ⅰ做左回转或右回转动作时,给压力传感器ⅱ11或压力传感器ⅲ12提供先导压力,压力传感器ⅱ11或压力传感器ⅲ12将采集到的压力值传递给控制器9,先导手柄ⅱ6做动臂提升动作时,给4pa2、5pb2、压力传感器ⅰ10同时提供先导压力,压力传感器ⅰ10将采集到的压力值传递给控制器9,控制器9在同时接收到压力传感器ⅰ10与压力传感器ⅱ11或压力传感器ⅲ12传递过来的压力信号时,压力传感器ⅱ11或压力传感器ⅲ12将采集到的压力值处理后,分别控制比例电磁阀ⅰ7或比例电磁阀ⅱ8,通过比例电磁阀ⅰ7或比例电磁阀ⅱ8对5pb3或5pa3提供二次先导压力,从而使回转阀杆3向左或向右移动,使泵p1的油经回转阀杆3的控制,进入回转马达2,驱动挖掘机机回转。
26.控制器9可以根据先期设定,控制比例电磁阀ⅰ7或比例电磁阀ⅱ8输出的二次压力的最大值,从而控制回转阀杆3移动的最大位移,进一步控制泵p1的油经回转阀杆3、进入回转马达2的最大流量,从而降低回转的速度,提升动臂举升的速度。
27.例如控制器9设定回转角度为60
°
时,可以实现动臂与回转的先导手柄同时摆到最大角度时,挖掘机回转60
°
的时候,动臂也同时提升4米,该控制方法根据挖掘机常用的工况,可以设定0
°
到360
°
之间的任意值,以适应不同工况的需求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1