一种清淤机器人及清淤系统的制作方法
1.本实用新型涉及清淤装置技术领域,特别涉及一种清淤机器人及清淤系统。
背景技术:
2.市政箱涵因具有重力流、埋深大、容易淤积等特点,容易造成堵塞、淤积和塌陷,从而引起各种事故或社会问题。目前,针对市政箱涵,主要采用人工及水力清淤的方式清除淤泥,存在安全隐患且效率低。
3.箱涵内除了淤泥外,还可能存在石块等各种物体,导致工作环境复杂。此外,箱涵内的水流量不稳定,泥浆过浓还容易导致管道堵塞。并且现有的清淤结构不能快速有效地清除箱涵内的淤泥,也不能有效地对大块淤泥进行过滤。因此,需要一种针对淤泥的高效清淤机器人。
技术实现要素:
4.为了解决上述现有技术的不足,本实用新型的主要目的是提出一种清淤机器人,以提高清淤效率,降低故障发生的频率。
5.为实现上述目的,本实用新型所采用的技术方案是:
6.一种清淤机器人,包括:一种清淤机器人,其特征在于,包括:运动底座和设于运动底座上的清淤装置,其中,清淤装置包括设有敞口的罩体,安装在所述罩体内的旋转扫入机构,以及出水组件,其中,所述出水组件的出水方向朝向所述旋转扫入机构外侧。
7.优选地,所述清淤装置与所述运动底座之间联接有用于调节清淤装置高度的升降机构。
8.优选地,所述清淤装置的外罩与所述升降机构之间通过横梁固定连接在一起。
9.优选地,所述旋转扫入机构为毛刷辊,所述旋转扫入机构通过传动链条与驱动装置传动联接,且驱动装置设于所述横梁上。
10.优选地,所述运动底座为履带式行进系统。
11.优选地,所述出水组件包括设于所述罩体上的水箱,水箱与高压喷水管道连接,且水箱上还设有多个可喷出高压水束的喷嘴。
12.优选地,所述罩体的下部开设有用于连接抽吸管道的吸排口,吸排口位于所述旋转扫入机构的内侧,且吸排口的位置高于所述罩体的底部。
13.优选地,所述罩体内设有罩在所述吸排口外的过滤网。
14.此外,为了实现上述目的,本实用新型还提供了一种清淤系统,包括高压冲水泵、泥泵及上述任意一项所述的清淤机器人,其中:
15.所述罩体上开设有用于连接抽吸管道的吸排口,且吸排口与所述泥泵通过抽吸管道连接;
16.所述出水组件与所述高压冲水泵通过水管连接。
17.优选地,所述高压冲水泵和泥泵与清淤机器人分离设置。
18.与现有技术相比,本发明的有益效果主要包括:
19.1、所述清淤机器人工作过程中,可通过出水组件为高浓度泥浆补水,从而更有利于泥泵的泵吸和输送,同时降低了管道堵塞的风险。
20.2、所述出水组件采用了高压喷头,可起到破土的作用,提高了清淤能力。所述旋转扫入机构与所述出水组件协同工作,旋转扫入机构优选为毛刷辊也可以起搅动破土的作用;此外还使得泥浆混合更加充分,提高对淤泥的抽吸输送效率。
21.3、通过在罩体内腔室内与吸排口之间设置过滤网,并且吸排口的高度高于罩体的底板高度,可以有效地对大型的泥块进行疏松和过滤,提高了清淤装置的工作效率。
22.4.利用升降装置,可根据工况灵活地调整清淤装置的高度,进而调节当前的清淤深度或者。其余有益效果还可参见实施例的具体内容。
附图说明
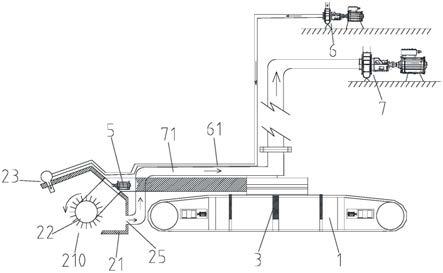
23.图1为实施例的清淤机器人的示意图,图中示出了部分剖面。
24.图2为实施例中的清淤装置的示意图,图中示出了部分剖面。
25.图3为实施例中的高压水箱的示意图。
26.图号说明:
27.1-运动底座、21-罩体、210-敞口、22-旋转扫入机构、23-出水组件、230-出水口、24-水箱、25-吸排口、3-升降机构、4-横梁、5-驱动装置、6-高压冲水泵、61-高压冲水管道、7-泥泵、71-抽吸管道。
具体实施方式
28.以下结合附图和具体实施例对本发明进一步说明。
29.实施例1
30.参照图1和图2所示,本实施例的清淤机器人,包括运动底座1和设于运动底座1上的清淤装置。
31.所述清淤结构包括设有敞口210的罩体21,旋转扫入机构22,所述旋转扫入机构22的两端安装在所述罩体21上。
32.在所述罩体21的内侧形成一侧敞开的腔室。旋转扫入机构22靠近敞口210的位置,用于扫动敞口210下侧的淤泥。
33.清淤结构中还设有出水组件23,所述出水组件23安装在所述罩体21上,且其出水口230朝向所述旋转扫入机构22的外侧。
34.所述出水组件23优选为高压喷水组件,高压喷水组件的出水口安装在罩体21上。一方面,在箱涵内的泥浆浓度过高不利于泥泵的泵吸和输送的情况下,出水组件23可对泥浆进行补水稀释;另一方面,高压水流可起破土的作用,参考图2中箭头a所示的水束方向,将所述旋转扫入机构22前方的淤泥冲散,使其与土体分离并且与周围的水混合形成泥浆,再在旋转扫入机构22的作用下被进一步混合并扫至内侧,通过所述吸排口25抽出输送,提高了清淤效率。
35.清淤作业时,清淤机器人借助其运动底座1向前后或者左右方向移动。具体的,清淤机器人向前移动的过程中,所述旋转扫入机构22工作,将泥浆向内扫入,此时,在旋转扫
入机构22内侧铺设抽吸管道71,将泥浆吸出。
36.优选地,所述罩体21的后端下部还开设有吸排口25,用于连接上述抽吸管道71。抽吸管道71主体部分则位于罩体21后侧,抽吸管道70的另一端用于与泥泵7连接。
37.优选地,所述清淤装置与所述运动底座1之间联接有用于调节清淤装置高度的升降机构3。
38.所述升降机构3为现有的结构,可采用包括但不限于液压升降台、电机驱动的升降台、电动推杆等组件,且本实用新型不对其升降原理、结构作特别限制,故而不再赘述其详细结构。升降机构3联接于运动底座1和清淤装置的罩体21之间,其中,升降机构3与罩体21之间可以是直接连接的,也可以是通过连接件、传动组件间接连接的。
39.升降机构3固定于运动底座上,升降机构3自身产生升降或者伸缩运动并驱动清淤装置相对于所述运动底座1上升或者下降,进而调节清淤装置的高度。
40.在清淤过程中,淤泥的高度可能存在变化,因此通过所述升降机构3得以适应性调节清淤装置的高度。若当前泥浆浓度过高,无法仅仅通过所述出水组件23充分补水时,也可适当抬高清淤装置的高度,减小清淤深度以控制被破土分离的淤泥量;同理,若当前泥浆浓度过低,则适当的增大清淤深度。
41.优选地,所述清淤装置的外罩21与所述升降机构3之间通过横梁4固定连接在一起。
42.优选地,所述旋转扫入机构22为毛刷辊,所述旋转扫入机构22通过传动链条与驱动装置5传动联接,且驱动装置5设于所述横梁4上。
43.优选地,所述运动底座1为履带式行进系统。
44.优选地,所述出水组件23包括设于所述罩体上的水箱24,水箱24与高压喷水管道61连接,且水箱24上还设有多个可喷出高压水束的喷嘴,每个喷嘴对应构成所述一个出水口230。
45.参考图3所示,所述水箱24为长条形结构,也可以设置为内径较大的管道,当高压喷水管道61中的水流进入水箱24时被大致均匀分流,再从各个喷嘴——出水口230喷出。
46.优选地,所述罩体21的下部开设有用于连接抽吸管道71的吸排口25。吸排口25位于所述旋转扫入机构22的内侧,且吸排口25的位置高于所述罩体21的底部,使得大粒径的异物,如石块等落在吸排口25的下方而不被吸入,避免了管道堵塞,同时也避免了这些异物挡住吸排口25,影响抽吸效率。
47.优选地,所述罩体21内设有罩在所述吸排口25外的过滤网(图中未示出)。过滤网可以直接固定在吸排口25上,也可以固定于所述吸排口25和罩体21之间,能够罩住吸排口25防止较大的异物进入抽吸管道71即可。
48.实施例2
49.如图1所示,本实施例的清淤系统,包括高压冲水泵6、泥泵7及上述实施例1的清淤机器人,其中:
50.所述罩体21上开设有用于连接抽吸管道71的吸排口25,且吸排口25与所述泥泵7通过抽吸管道71连接;
51.所述出水组件23与所述高压冲水泵6通过高压喷水管道61连接。
52.优选地,所述高压冲水泵6和泥泵7与清淤机器人分离设置,其中,高压冲水泵6和
泥泵7均设于水面上、箱涵外等位置,减轻清淤机器人的重量并且简化其结构,当高压冲水泵6和泥泵7出现故障时更加便于检修,降低了针对清淤机器人的维护频率。
53.本发明中的实施例仅用于对本发明进行说明,并不构成对权利要求范围的限制,本领域内技术人员可以想到的其他实质上等同的替代,均在本发明保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1