旋转式遥控破碎锤的制作方法
1.本实用新型涉及破碎锤技术领域,具体是一种旋转式遥控破碎锤。
背景技术:
2.液压破碎锤的动力来源是挖掘机或装载机的泵站提供的压力油,它能在挖掘建筑物基础的作用中更有效地清理浮动的石块和岩石缝隙中的泥土,选用液压破碎锤的原则是根据挖掘机型号,作业的环境来选择最适合的液压破碎锤,破碎锤根据操作方式分类:液压破碎锤分为手持式和机载式两大类;根据工作原理分类:液压破碎器分为全液压式,液气联合式与氮爆式三大类,液气联合式依靠液压油和后部压缩氮气膨胀同时推动活塞工作,绝大多数破碎器属于此类产品,根据配流阀结构分类:液压破碎器分为内置阀式和外置阀式两种。
3.目前,在比较狭窄的作业巷道里面最常用的还是遥控式破碎锤,采用控制左右履带行走来达到修复巷道面的目的,但是由于巷道空间较为狭窄,遥控式破碎锤若需要在巷道内转向则操作繁琐,影响工作效率;为此,我们提供了一种旋转式遥控破碎锤解决以上问题。
技术实现要素:
4.本实用新型的目的就是为了弥补现有技术的不足,提供了旋转式遥控破碎锤。
5.为实现上述目的,本实用新型提供如下技术方案:一种旋转式遥控破碎锤,包括底盘机构,所述底盘机构上设置有回转平台和支撑机构,且回转平台安装于支撑机构上,所述底盘机构上设置有用于控制支撑机构转动的回转机构,所述回转平台上安装有用于破碎的破碎机构,所述底盘机构上设置有用于驱动底盘机构和回转机构的控制源。
6.进一步的,所述支撑机构包括转台和支撑轴,所述支撑轴的底端固定连接于底盘机构的上表面,所述转台转动连接于支撑轴的外表面,所述回转平台固定连接于转台的外表面。
7.进一步的,所述回转机构优选为液压油缸,所述回转机构的一端与底盘机构的上表面铰接,所述回转机构的另一端与转台铰接。
8.进一步的,所述控制源包括动力源、多路阀和遥控信号接收器,所述遥控信号接收器与所述动力源电连接,所述动力源通过所述多路阀与所述回转机构控制连接。
9.进一步的,所述动力源包括电机和马达。
10.进一步的,所述破碎机构包括第一铰接杆和第一电动推杆,所述第一铰接杆和第一电动推杆均铰接于回转平台的上表面,所述第一铰接杆靠近回转平台的一端铰接有第二电动推杆,所述第一电动推杆的伸缩端与第一铰接杆铰接。
11.进一步的,所述第二电动推杆的伸缩端和第一铰接杆的远端均铰接有第二铰接杆,所述第二铰接杆上铰接有第三电动推杆,所述第三电动推杆的伸缩端与第三铰接杆铰接,所述第三铰接杆远离第二铰接杆的一端安装有破碎锤本体。
12.与现有技术相比,该旋转式遥控破碎锤具备如下有益效果:
13.1、本实用新型通过回转平台、回转机构、支撑机构和控制源的配合设置,通过控制源控制回转机构,并利用回转机构对支撑机构上的回转平台进行转动,从而可使回转平台上的破碎机构进行左右摆动,达到在同一作业端面底盘机构不动的情况下实现巷道修复的目的,适合在狭小的巷道使用,操作简单且操作不频繁。
14.2、本实用新型通过破碎机构,通过第一电动推杆的伸缩端带动第一铰接杆在回转平台上转动,进而可对第一铰接杆的位置和角度进行调整,通过第二电动推杆的伸缩端可控制第二铰接杆在第一铰接杆内转动,通过第三电动推杆的伸缩端可控制第三铰接杆在第二铰接杆上转动,进而可对破碎锤本体进行多方位位置调节。
附图说明
15.图1为本实用新型的立体结构示意图;
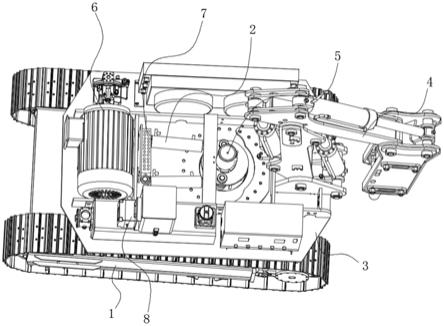
16.图2为本实用新型的主视图。
17.图中:1底盘机构、2回转机构、3回转平台、4破碎机构、41第一铰接杆、42第一电动推杆、43第二电动推杆、44第二铰接杆、45 第三铰接杆、46第三电动推杆、47破碎锤本体、5支撑机构、6动力源、7多路阀、8遥控信号接收器。
具体实施方式
18.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
19.本实施例提供了一种旋转式遥控破碎锤,该旋转式遥控破碎锤用于在巷道施工中实现对破碎锤的多角度调节,通过设计回转平台3、回转机构2、支撑机构5和控制源,达到在同一作业端面底盘机构1 不动的情况下实现巷道修复的目的,适合在狭小的巷道使用,操作简单且操作不频繁。
20.参见图1~图2,一种旋转式遥控破碎锤,包括底盘机构1,底盘机构1上设置有回转平台3和支撑机构5,且回转平台3安装于支撑机构5上,底盘机构1上设置有可驱动底盘机构1移动的履带,利用履带来带动底盘机构1在对地面上行走,能够使底盘机构1可在坑洼不平的地面上移动。
21.支撑机构5包括转台和支撑轴,支撑轴的底端固定连接于底盘机构1的上表面,转台转动连接于支撑轴的外表面,回转平台3固定连接于转台的外表面。
22.底盘机构1上设置有用于控制支撑机构5转动的回转机构2,回转机构2优选为液压油缸,回转机构2的一端与底盘机构1的上表面铰接,回转机构2的另一端与转台铰接。
23.回转平台3上安装有用于破碎的破碎机构4,破碎机构4为现有技术,原理为依靠液压油和后部压缩氮气膨胀,同时推动活塞工作,进而使破碎端对物品进行破碎,底盘机构1上设置有用于驱动底盘机构1和回转机构2的控制源。
24.破碎机构4包括第一铰接杆41和第一电动推杆42,第一铰接杆 41和第一电动推杆42均铰接于回转平台3的上表面,第一铰接杆41 靠近回转平台3的一端铰接有第二电动推杆43,第一电动推杆42的伸缩端与第一铰接杆41铰接。
25.通过第一电动推杆42的伸缩端带动第一铰接杆41在回转平台3 上转动,进而可对
第一铰接杆41的位置和角度进行调整。
26.第二电动推杆43的伸缩端和第一铰接杆41的远端均铰接有第二铰接杆44,第二铰接杆44上铰接有第三电动推杆46,第三电动推杆46的伸缩端与第三铰接杆45铰接,第三铰接杆45远离第二铰接杆 44的一端安装有破碎锤本体47。
27.通过第二电动推杆43的伸缩端可控制第二铰接杆44在第一铰接杆41内转动,通过第三电动推杆46的伸缩端可控制第三铰接杆45 在第二铰接杆44上转动,进而可对破碎锤本体47进行多方位位置调节。
28.控制源包括动力源6、多路阀7和遥控信号接收器8,遥控信号接收器8与动力源6电连接,动力源6通过多路阀7与回转机构2控制连接,动力源6包括电机和马达,遥控信号接收器8、与动力源6 和多路阀7之间的信号传递方式为现有技术,本实用新型中不作详述。
29.可通过外部控制器发送信号给遥控信号接收器8,使得底盘机构 1可通过履带在地面上进行移动,还可使动力源6为多路阀7提供动力,并使多路阀7将动力传输给回转机构2,利用回转机构2使回转平台3在底盘机构1上左右晃动,从而对破碎机构4的工作位置进行调整。
30.工作原理:首先,使底盘机构1利用履带和自带的移动机构移动至合适位置,随后,利用破碎机构4对巷道内部件进行锤击破碎,若需要对底盘机构1两侧的部件进行破碎时,无需底盘机构1移动,可通过外部控制器发送信号给遥控信号接收器8,使得遥控信号接收器 8控制动力源6启动,使动力源6为多路阀7提供动力,并使多路阀 7将动力传输给回转机构2,利用回转机构2使回转平台3在底盘机构1上左右摆动,从而对破碎机构4的工作位置进行调整,达到在同一作业端面底盘机构1不动的情况下实现巷道修复的目的,适合在狭小的巷道使用,操作简单且操作不频繁。
31.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1