智能工厂拖把池的制作方法
1.本实用新型涉及清洁用具技术领域,尤其涉及一种智能工厂拖把池。
背景技术:
2.拖把,指擦洗地面的长柄清洁工具,一般是将多股布条捆扎在一个长杆上制成,现代智能工厂中,对车间环境的洁净度有较高的需求,需要使用拖把进行清洁,并在拖把池内进行清洗。
3.传统的,智能工厂中的拖把池大多为一个水池,水池表面光滑,不利于拖把的清洗,造成拖把清洗不干净,同时拖把清洁完毕后,不便于自动脱水,需要人为手动拧干,费时费力。
4.因此,有必要提供一种智能工厂拖把池解决上述技术问题。
技术实现要素:
5.本实用新型解决的技术问题是提供一种操作简单、便于将拖把清洗干净、同时便于快速对拖把进行脱水处理、省时省力、适用于家庭、工业、饭店等多个场所的智能工厂拖把池。
6.为解决上述技术问题,本实用新型提供的智能工厂拖把池,包括:池体;隔板,所述隔板固定安装在所述池体的底部内壁上;两个固定座,两个所述固定座分别固定安装在所述隔板和所述池体上;定位槽,所述定位槽开设在所述固定座上;筛片,所述筛片活动安装在两个所述固定座上,且所述筛片与所述定位槽相适配;两个挤压板,两个所述挤压板对称滑动安装在所述池体内;过滤网,所述过滤网固定安装在所述池体内;安装箱,所述安装箱固定安装在所述池体的内壁上;齿轮,所述齿轮转动安装在所述安装箱内;两个齿条,两个所述齿条对称滑动安装在所述安装箱上,两个所述齿条均与所述齿轮相啮合,所述齿条与对应的所述挤压板固定连接;t形杆,所述t形杆固定安装在一个所述挤压板上,所述t形杆一端贯穿所述池体并与所述池体滑动密封连接。
7.优选的,所述池体的一侧固定安装有保护罩,所述t形杆的一端延伸至所述保护罩内,所述t形杆上套设有第一弹簧,所述第一弹簧的一端与所述t形杆固定连接,所述第一弹簧的另一端与所述池体固定连接。
8.优选的,所述保护罩内固定安装有电机,所述电机的输出轴上固定安装有凸轮,所述凸轮与所述t形杆相适配。
9.优选的,所述安装箱的内壁上固定安装有限位杆,所述齿条上开设有限位槽,所述限位杆与所述限位槽的内壁滑动连接。
10.优选的,所述筛片由白钢材质制成,所述池体的底部开设有两个排水管,所述排水管上设有阀门,所述池体的底部固定安装有四个支撑腿。
11.优选的,所述t形杆上转动安装有铰接杆,所述保护罩内固定安装有固定杆,所述固定杆上滑动安装有滑块,所述固定杆上套设有第二弹簧,所述第二弹簧的顶端与所述保
护罩的内壁固定连接,所述第二弹簧的底端与所述滑块固定连接。
12.优选的,所述滑块的底部固定安装有脚踏板,所述脚踏板的底部贯穿所述保护罩。
13.优选的,所述滑块的一侧固定安装有限位块,所述保护罩的一侧内壁上开设有定位槽,所述限位块与定位槽的内壁滑动连接。
14.与相关技术相比较,本实用新型提供的智能工厂拖把池具有如下有益效果:
15.本实用新型提供一种智能工厂拖把池,两个所述固定座分别固定安装在所述隔板和所述池体上,所述筛片活动安装在两个所述固定座上,且所述筛片与所述定位槽相适配,便于对筛片进行安装,且通过将筛片折叠成波浪纹,有利于提高对拖把的清洗效果;两个所述挤压板对称滑动安装在所述池体内,所述齿轮转动安装在所述安装箱内,两个所述齿条均与所述齿轮相啮合,所述t形杆固定安装在一个所述挤压板上,所述t形杆上套设有第一弹簧,所述凸轮与所述t形杆相适配,便于带动两个挤压板运动,实现对拖把进行挤压脱水,省时省力、保障快速晾干。
附图说明
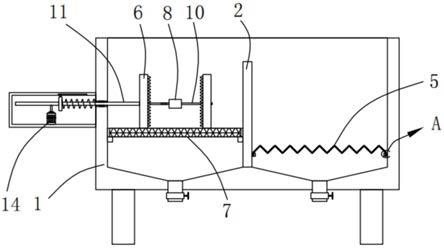
16.图1为本实用新型提供的智能工厂拖把池第一实施例的结构示意图;
17.图2为图1所示的a部分的放大示意图;
18.图3为图1所示的俯视剖视结构示意图;
19.图4为图3所示的b部分的放大示意图;
20.图5为本实用新型提供的智能工厂拖把池第二实施例的示意图;
21.图6为图5所示的c部分的放大示意图;
22.图7为本实用新型提供的智能工厂拖把池第三实施例的示意图;
23.图8为本实用新型提供的智能工厂拖把池第四实施例的示意图。
24.图中标号:1、池体;2、隔板;3、固定座;4、定位槽;5、筛片;6、挤压板;7、过滤网;8、安装箱;9、齿轮;10、齿条;11、t形杆;12、保护罩;13、第一弹簧;14、电机;15、凸轮;16、铰接杆;17、固定杆;18、滑块;19、第二弹簧;20、脚踏板;21、转动杆;22、气缸。
具体实施方式
25.下面结合附图和实施方式对本实用新型作进一步说明。
26.第一实施例
27.请结合参阅图1-4,在本实用新型的第一实施例中,智能工厂拖把池包括:池体1;隔板2,所述隔板2固定安装在所述池体1的底部内壁上;两个固定座3,两个所述固定座3分别固定安装在所述隔板2和所述池体1上;定位槽4,所述定位槽4开设在所述固定座3上;筛片5,所述筛片5活动安装在两个所述固定座3上,且所述筛片5与所述定位槽4相适配;两个挤压板6,两个所述挤压板6对称滑动安装在所述池体1内;过滤网7,所述过滤网7固定安装在所述池体1内,过滤网7便于过滤杂质;安装箱8,所述安装箱8固定安装在所述池体1的内壁上;齿轮9,所述齿轮9转动安装在所述安装箱8内;两个齿条10,两个所述齿条10对称滑动安装在所述安装箱8上,两个所述齿条10均与所述齿轮9相啮合,所述齿条10与对应的所述挤压板6固定连接;t形杆11,所述t形杆11固定安装在一个所述挤压板6上,所述t形杆11一端贯穿所述池体1并与所述池体1滑动密封连接。
28.所述池体1的一侧固定安装有保护罩12,所述t形杆11的一端延伸至所述保护罩12内,所述t形杆11上套设有第一弹簧13,所述第一弹簧13的一端与所述t形杆11固定连接,所述第一弹簧13的另一端与所述池体1固定连接,第一弹簧13用于实现t形杆11往复运动。
29.所述保护罩12内固定安装有电机14,所述电机14的输出轴上固定安装有凸轮15,所述凸轮15与所述t形杆11相适配。
30.所述安装箱8的内壁上固定安装有限位杆,所述齿条10上开设有限位槽,所述限位杆与所述限位槽的内壁滑动连接,限位杆和限位槽对齿条10起到限位作用。
31.所述筛片5由白钢材质制成,所述池体1的底部开设有两个排水管,排水管用于将池体1内的废水排出,所述排水管上设有阀门,所述池体1的底部固定安装有四个支撑腿。
32.本实用新型提供的智能工厂拖把池的工作原理如下:
33.首先将筛片5折叠成波浪纹,然后通过定位槽4将筛片5安装在固定座3上,将池体1注入水,使得水淹没筛片5,然后将拖把在筛片5上来回清洁,可以有效的提高清洁效果;
34.拖把清洁干净后,将拖把放置在两个挤压板6之间,启动电机14,电机14的输出轴带动凸轮15转动,凸轮15通过第一弹簧13带动t形杆11往复运动,t形杆11带动一个挤压板6运动,一个挤压板6带动一个齿条10运动,一个齿条10通过齿轮9带动另一个齿条10运动,另一个齿条10带动另一个挤压板6运动,使得两个挤压板6向相互靠近的方向运动,从而可以对拖把进行挤压,从而实现脱水,不需要人为手动拧干,省时省力。
35.与相关技术相比较,本实用新型提供的智能工厂拖把池具有如下有益效果:
36.本实用新型提供一种智能工厂拖把池,两个所述固定座3分别固定安装在所述隔板2和所述池体1上,所述筛片5活动安装在两个所述固定座3上,且所述筛片5与所述定位槽4相适配,便于对筛片5进行安装,且通过将筛片5折叠成波浪纹,有利于提高对拖把的清洗效果;两个所述挤压板6对称滑动安装在所述池体1内,所述齿轮9转动安装在所述安装箱8内,两个所述齿条10均与所述齿轮9相啮合,所述t形杆11固定安装在一个所述挤压板6上,所述t形杆11上套设有第一弹簧13,所述凸轮15与所述t形杆11相适配,便于带动两个挤压板6运动,实现对拖把进行挤压脱水,省时省力、保障快速晾干。
37.第二实施例:
38.基于本技术的第一实施例提供的智能工厂拖把池,本技术的第二实施例提出另一种智能工厂拖把池。第二实施例仅仅是第一实施例的优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
39.下面结合附图和实施方式对本实用新型的第二实施例作进一步说明。
40.请结合参阅图5-6,智能工厂拖把池还包括铰接杆16,所述铰接杆16转动安装在所述t形杆11上,所述保护罩12内固定安装有固定杆17,所述固定杆17上滑动安装有滑块18,所述固定杆17上套设有第二弹簧19,所述第二弹簧19的顶端与所述保护罩12的内壁固定连接,所述第二弹簧19的底端与所述滑块18固定连接。
41.所述滑块18的底部固定安装有脚踏板20,所述脚踏板20的底部贯穿所述保护罩12,脚踏板20方便人为踩踏,从而方便带动滑块18运动。
42.所述滑块18的一侧固定安装有限位块,所述保护罩12的一侧内壁上开设有定位槽,所述限位块与定位槽的内壁滑动连接,限位块和定位槽便于对滑块18起到限位作用。
43.第一弹簧13和第二弹簧19均处于拉伸状态,使用时,手持拖把至于两个挤压板6之
间,在第一弹簧13和第二弹簧19的作用下,可以带动脚踏板20和滑块18向上运动,滑块18带动铰接杆16运动,铰接杆16推动t形杆11运动,t形杆11运动带动两个挤压板6向相互靠近的方向运动,从而可以对拖把进行脱水,通过人为不断的脚踩脚踏板20,从而可以实现两个挤压板6往复运动,实现不断的对拖把进行脱水、操作简单。
44.第三实施例:
45.基于本技术的第一实施例提供的智能工厂拖把池,本技术的第三实施例提出另一种智能工厂拖把池。第三实施例仅仅是第一实施例的优选的方式,第三实施例的实施对第一实施例的单独实施不会造成影响。
46.本实施例与第一实施例的区别在于:本实施例中电机14的输出轴由转动杆21代替,所述转动杆21与所述保护罩12转动连接,所述转动杆21的底端固定安装有把手。
47.在不使用电的情况下,可以手动实现对拖把进行挤压脱水。
48.第四实施例:
49.基于本技术的第二实施例提供的智能工厂拖把池,本技术的第四实施例提出另一种智能工厂拖把池。第四实施例仅仅是第二实施例的优选的方式,第四实施例的实施对第二实施例的单独实施不会造成影响。
50.本实施例与第二实施例的区别在于:本实施例中脚踏板20由气缸22代替,所述气缸22与所述保护罩12固定连接。
51.不需要人工脚踩,通过气缸22伸缩,实现对拖把进行挤压脱水。
52.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1