工程机械的制作方法
1.本发明涉及液压挖掘机等工程机械。
背景技术:
2.在专利文献1中记载了一种流体压力致动器控制电路,其将储存在蓄能器(蓄压装置)中的压力油供给到动臂液压缸,并相应降低从泵向动臂液压缸输送的流量,从而能够降低耗油量。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2009-275771号公报
技术实现要素:
6.发明所要解决的课题
7.在以往的液压挖掘机中,在操作者进行精细的作业的情况下或在想要降低车身噪音的情况下,有时会降低发动机转速来进行作业。通过降低发动机转速,能够降低从液压泵向致动器供给的压力油的供给量,使液压挖掘机整体的动作变慢。但是,在专利文献1所记载的流体压力致动器控制电路中,存在如下课题:在对蓄能器蓄压了足够的压力油时,从蓄能器向致动器供给压力油,因此即使降低发动机转速,从蓄能器向致动器供给的压力油的供给量不变而无法降低致动器的速度。
8.本发明是鉴于所述课题而完成的,其目的在于提供一种工程机械,其搭载有储存致动器的返回油的蓄压装置,并且能够根据原动机的转速来调整致动器的动作速度。
9.用于解决课题的手段
10.为了实现所述目的,本发明的工程机械具备:原动机;液压泵,其由所述原动机驱动;转速设定装置,其设定所述原动机的转速;致动器;蓄压装置,其储存所述致动器的返回油;第一控制阀,其设置于将所述蓄压装置与所述致动器连接的油路;操作装置,其指示所述致动器的动作;以及控制器,其被输入所述操作装置的操作信号,并向所述第一控制阀输出控制信号,所述控制器基于所述操作装置的操作量和由所述转速设定装置设定的转速来控制所述第一控制阀。
11.根据如以上那样构成的本发明,在搭载有储存致动器的返回油的蓄压装置的工程机械中,蓄压装置对致动器供排的压力油的流量根据原动机的转速而变化。由此,能够根据原动机的转速来调整致动器的动作速度。
12.发明效果
13.根据本发明,在搭载有储存致动器的返回油的蓄压装置的工程机械中,能够根据原动机的转速来调整致动器的动作速度。
附图说明
14.图1是本发明的实施方式的液压挖掘机的侧视图。
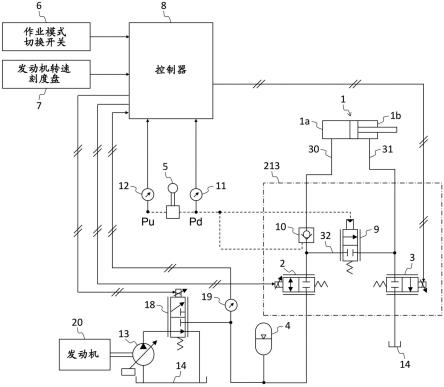
15.图2是搭载于图1所示的液压挖掘机的液压驱动装置的回路图。
16.图3是表示图2所示的控制器的处理内容的图。
17.图4是表示发动机转速与和底侧控制阀的目标开口量相乘的增益之间的对应关系的图。
具体实施方式
18.以下,作为本发明的实施方式的工程机械,以液压挖掘机为例参照附图进行说明。另外,在各图中,对同等的部件标注相同的附图标记,并适当省略重复的说明。
19.图1是本实施方式的液压挖掘机的侧视图。
20.如图1所示,液压挖掘机200具备:行驶体201;回转体202,其以能够回转的方式配置在行驶体201上,构成车身;以及作业装置203,其以能够在上下方向上转动的方式安装在回转体202上,进行砂土的挖掘作业等。回转体202由回转电动机204驱动。
21.作业装置203包含:动臂205,其以能够在上下方向上转动的方式安装于回转体202;斗杆206,其以能够在上下方向上转动的方式安装于动臂205的顶端;以及铲斗207,其以能够在上下方向上转动的方式安装于斗杆206的顶端。动臂205由动臂液压缸1驱动,斗杆206由斗杆液压缸208驱动,铲斗207由铲斗液压缸209驱动。
22.在回转体202上的前侧位置设置有驾驶室210,在后侧位置设置有确保重量平衡的配重211。在驾驶室210与配重211之间设置有机械室212。在机械室212中收纳有作为原动机的发动机、液压泵、控制阀213等。控制阀213控制从液压泵向各致动器供给的压力油的流动。另外,本发明中的原动机并不限定于发动机,也可以是能够经由逆变器调整转速的电动机。
23.图2是搭载于液压挖掘机200的液压驱动装置的回路图。
24.动臂操作杆5是用于操作人员指示动臂205的动作的操作装置,在向动臂上升方向操作时输出动臂上升先导压pu,在向动臂下降方向操作时输出动臂下降先导压pd。动臂下降先导压pd作用于后述的先导止回阀10及升压用控制阀9。动臂下降先导压pd由压力传感器11检测,动臂上升先导压pu由压力传感器12检测。压力传感器11、12的信号被输入到控制器8。
25.作业模式切换开关6是操作员用于选择作业模式的操作装置,作业模式切换开关6的信号被输入到控制器8。发动机转速刻度盘7是操作员用于设定发动机20的转速的操作装置,发动机转速刻度盘7的信号被输入到控制器8。操作员经由发动机转速刻度盘7变更发动机转速,由此能够调整液压挖掘机200的动作速度。
26.蓄能器4是在动臂液压缸1收缩时蓄积来自底侧的返回油,在动臂液压缸1伸长时向底侧供给压力油的液压设备。蓄能器4与底侧油室1a经由底侧油路30连接,在底侧油路30配置有控制阀2(以下称为底侧控制阀)。底侧控制阀2根据来自控制器8的控制信号使开口量变化,由此控制从蓄能器4向动臂液压缸1的底侧油室1a供给的流量、或从底侧油室1a向蓄能器4再生的流量(再生流量)。
27.在底侧油路30中的连接底侧控制阀2与底侧油室1a的油路部分配置有先导止回阀
10。先导止回阀10在动臂下降先导压pd未作用时阻止压力油从底侧油室1a流出,在动臂下降先导压pd发挥作用时允许压力油从底侧油室1a流出。由此,只要动臂操作杆5未被向动臂下降方向操作,则保持底压,因此能够防止动臂205违反操作员意图而落下。
28.动臂液压缸1的杆侧油室1b经由杆侧油路31与工作油箱14连接。在杆侧油路31配置有控制阀3(以下称为杆侧控制阀)。杆侧控制阀3根据来自控制器8的控制信号调整开口量,由此控制从动臂液压缸1的杆侧油室1b向工作油箱14排出的流量。
29.底侧油路30中的连接先导止回阀10与底侧控制阀2的油路部分经由连通油路32和杆侧油路31中的连接杆侧油室1b与杆侧控制阀3的油路部分连接。在连通油路32配置有升压用控制阀9。升压用控制阀9在动臂下降先导压pd未作用时关闭,通过动臂下降先导压pd的作用而打开。在动臂下降动作时,经由升压用控制阀9使底侧油路30与杆侧油路31连通,由此能够使底压升压。
30.在动臂操作杆5被向动臂下降方向操作,从动臂操作杆5输出动臂下降先导压pd时,控制器8打开底侧控制阀2。此时,通过动臂下降先导压pd解除先导止回阀10的压力保持功能,并且,升压用控制阀9打开且动臂液压缸1的底侧被升压。由此,动臂液压缸1的底侧油室1a的压力油被供给至蓄能器4及杆侧油室1b,动臂液压缸1进行收缩动作。
31.在动臂操作杆5被向动臂上升方向操作,从动臂操作杆5输出动臂上升先导压pu时,控制器8打开底侧控制阀2及杆侧控制阀3。此时,升压用控制阀9关闭,动臂液压缸1的底侧没有升压。由此,蓄能器4的压力油被供给到动臂液压缸1的底侧油室1a,并且,杆侧油室1b的工作油经由杆侧控制阀3被排出到工作油箱14,动臂液压缸1进行伸长动作。
32.液压泵13是用于向蓄能器4、未图示的其他致动器供给压力油的液压设备,由发动机20驱动。液压泵13的排出口经由供给用控制阀18与工作油箱14或蓄能器4中的任一方连接。供给用控制阀18根据来自控制器8的控制信号而切换。蓄能器4的压力由压力传感器19来检测,压力传感器19的信号被输入到控制器8。控制器8根据蓄能器4的压力来切换供给用控制阀18,由此能够保持蓄能器4的压力。
33.图3是表示控制器8的处理内容的图。
34.在图3中,压力传感器信号112是根据由压力传感器12检测出的动臂上升先导压pu(动臂上升操作量)而输入到控制器8的信号。压力传感器信号111是根据由压力传感器11检测出的动臂下降先导压pd(动臂下降操作量)而输入到控制器8的信号。发动机转速刻度盘信号107是根据由发动机转速刻度盘7设定的发动机转速而输入到控制器8的信号。作业模式切换开关信号106是根据由作业模式切换开关6选择的作业模式而输入到控制器8的信号。压力传感器信号119是根据由压力传感器19检测出的蓄能器4的压力而输入到控制器8的信号。
35.函数产生部120将压力传感器信号112(动臂上升操作量)转换为杆侧控制阀3的目标开口量,并输出至输出转换部121。输出转换部121将与来自函数产生部120的目标开口量相应的控制信号向杆侧控制阀3输出。由此,杆侧控制阀3根据动臂上升操作量而开口,动臂液压缸1的杆侧的工作油被排出至工作油箱14。
36.函数产生部122将压力传感器信号112(动臂上升操作量)转换为底侧控制阀2的目标开口量,并输出至乘法部123。函数产生部124将压力传感器信号111(动臂下降操作量)转换为底侧控制阀2的目标开口量,并输出至乘法部125。函数生成部126将与发动机转速刻度
盘信号107(发动机转速)以及作业模式切换开关信号106(作业模式)相应的增益输出到乘法部123、125。
37.图4是表示发动机转速及作业模式与增益的对应关系的图。在本实施例中的函数产生部110中设定有3个特性a、b、c。函数产生部110根据作业模式选择特性a、b、c中的任一个。例如在重视作业效率的作业模式下选择特性a,在重视节能的作业模式下选择特性b、c。特性a的增益根据发动机转速从下限值(例如0.3)连续地增加到上限值(1.0)。特性b的增益根据发动机转速从最小值(0.3)连续地增加到预定的上限值(例如0.9)。特性c的增益根据发动机转速从下限值(0.3)连续地增加到预定的上限值(例如0.8)。这样,通过根据发动机转速使增益变化,能够根据发动机转速来调整底侧控制阀2的开口量相对于动臂操作杆5的操作量的灵敏度。另外,通过根据作业模式使增益的上限值变化,能够根据作业模式限制致动器的最大动作速度。
38.返回图3,乘法部123将来自函数产生部126的增益乘以来自函数产生部122的目标开口量,并输出到最大值选择部127。乘法部125将来自函数产生部126的增益乘以来自函数产生部124的目标开口量,并输出到最大值选择部127。最大值选择部127选择来自乘法部123的目标开口量和来自乘法部125的目标开口量中的较大一方,并输出到输出转换部128。输出转换部128将与来自最大值选择部127的目标开口量相应的控制阀控制信号102向底侧控制阀2输出。由此,在动臂操作杆5被向动臂上升方向操作时,底侧控制阀2根据动臂上升操作量而开口,蓄能器4的压力油被供给至动臂液压缸1的底侧。另一方面,在动臂操作杆5被向动臂下降方向操作时,底侧控制阀2根据动臂下降操作量而开口,通过升压用控制阀9打开而将升压的动臂液压缸1的底侧的压力油的一部分储存于蓄能器4,剩余的一部分被供给至动臂液压缸1的杆侧。
39.函数产生部129将压力传感器信号119(蓄能器4的压力)转换为供给用控制阀18的接通/断开位置,并输出至输出转换部130。具体而言,在蓄能器4的压力低于预定值时输出接通位置,在预定值以上时输出断开位置。输出转换部130将与来自函数产生部129的接通/断开位置对应的控制阀控制信号向供给用控制阀18输出。由此,若蓄能器4的压力低于预定的值,则利用液压泵13对蓄能器4进行蓄压。
40.在本实施方式中,在具备发动机20、用于设定发动机20的转速的转速设定装置7、致动器1、储存来自致动器1的返回油的蓄压装置4、设置于将蓄压装置4与致动器1连接的油路30的第一控制阀2、用于指示致动器1的动作的操作装置5、输入操作装置5的操作信号并向第一控制阀2输出控制信号的控制器8的工程机械200中,控制器8基于操作装置5的操作量和由转速设定装置7设定的转速来控制第一控制阀2。
41.根据如以上那样构成的本实施方式,在搭载有储存致动器1的返回油的蓄压装置4的工程机械200中,蓄压装置4对致动器1供排的压力油的流量根据原动机20的转速而变化。由此,能够根据原动机20的转速来调整致动器1的动作速度,在降低原动机20的转速来进行作业时,能够维持从蓄压装置4供给压力油的致动器1与从液压泵13供给压力油的其他致动器的速度平衡。
42.另外,本实施方式的工程机械200具备:工作油箱14;液压泵13,其由原动机20驱动,从工作油箱14吸入工作油并排出;压力传感器19,其检测蓄压装置4的压力;以及第二控制阀18,其根据来自控制器8的控制信号将液压泵13的排出口与工作油箱14和蓄压装置4中
的任一方连接,控制器8以如下方式向第二控制阀18输出控制信号:在由压力传感器19检测出的压力为预定的压力以上时,将液压泵13的排出口与工作油箱14连接,在由压力传感器19检测出的压力低于所述预定的压力时,将液压泵13的排出口与蓄压装置4连接。由此,蓄压装置4的压力保持在预定的压力以上,因此能够在任意的定时驱动致动器1。
43.另外,本实施方式的工程机械200具备动臂205,致动器1是驱动动臂205的动臂液压缸。由此,操作员能够经由转速设定装置7变更原动机20的转速,由此调整动臂液压缸1的动作速度。
44.另外,在本实施方式中,原动机20是发动机,转速设定装置7是设定发动机20的转速的发动机转速刻度盘,通过使与操作装置5的操作量对应的第一控制阀2的开口量乘以与由发动机转速刻度盘7设定的转速对应的增益来计算出所述目标开口量。由此,能够经由发动机转速刻度盘7的操作来调整致动器1的动作速度。
45.另外,本实施方式的工程机械200具备用于选择作业模式的作业模式选择装置6,控制器8根据由作业模式选择装置6选择的作业模式来变更所述增益的上限值。由此,操作员能够根据经由作业模式选择装置6选择出的作业模式来限制致动器1的最大动作速度。
46.另外,在本实施例中,构成为利用与目标开口量相应的控制信号来控制底侧控制阀2以及杆侧控制阀3,但在底侧控制阀2以及杆侧控制阀3中能够使用由与目标流量相应的控制信号控制的流量控制阀。在该情况下,控制器8构成为,代替与目标开口量对应的控制信号,而将与目标流量相应的控制信号向底侧控制阀2以及杆侧控制阀3输出。
47.以上,对本发明的实施例进行了详述,但本发明并不限定于所述的实施方式,包含各种变形例。例如,所述的实施方式是为了易于理解地说明本发明而详细地进行了说明的方式,并不限定于必须具备所说明的全部结构。
48.附图标记说明
[0049]1…
动臂液压缸(致动器)、2
…
底侧控制阀(第一控制阀)、3
…
杆侧控制阀、4
…
蓄能器(蓄压装置)、5
…
动臂操作杆(操作装置)、6
…
作业模式切换开关(作业模式选择装置)、7
…
发动机转速刻度盘(转速设定装置)、8
…
控制器、9
…
控制阀、10
…
先导止回阀、11
…
压力传感器、12
…
压力传感器、13
…
液压泵、14
…
工作油箱、18
…
供给用控制阀(第二控制阀)、19
…
压力传感器、20
…
发动机(原动机)、30
…
底侧油路、31
…
杆侧油路、32
…
连通油路、102
…
控制阀控制信号、103
…
控制阀控制信号、106
…
作业模式切换开关信号、107
…
发动机转速刻度盘信号、111、112
…
压力传感器信号、118
…
控制阀控制信号、119
…
压力传感器信号、120、122、124、126、129
…
函数产生部、121、128、130
…
输出转换部、123、125
…
乘法部、127
…
最大值选择部、200
…
液压挖掘机(工程机械)、201
…
行驶体、202
…
回转体、203
…
作业装置、204
…
回转电动机、205
…
动臂、206
…
斗杆、207
…
铲斗、208
…
斗杆液压缸、209
…
铲斗液压缸、210
…
驾驶室、211
…
配重、212
…
机械室、213
…
控制阀。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1