挖掘信息处理装置、工作装置械、挖掘辅助装置及挖掘信息处理方法与流程
1.本发明涉及挖掘信息处理装置、工作装置械、挖掘辅助装置及挖掘信息处理方法。本技术基于2020年8月7日在日本提出申请的特愿2020-134559号主张优先权,在此援用其内容。
背景技术:
2.背景技术
3.在专利文献1所记载的挖掘装置中,从由立体摄像头拍摄的图像中识别铲斗、地面以及挖掘物,基于识别的结果决定挖掘地点。挖掘地点是在挖掘动作时使铲斗最先与挖掘物接触的位置,在该挖掘装置中,以挖掘量(挖掘土量)多,不刮削地面且挖掘物不崩落的方式来决定。而且,在该挖掘装置中,通过使铲斗从该挖掘地点铲起而进行挖掘。
4.现有技术文献
5.专利文献
6.专利文献1:国际公开第2015/162710号
技术实现要素:
7.发明所要解决的问题
8.在专利文献1所记载的挖掘装置中,通过使铲斗从以挖掘土量变多的方式决定的挖掘地点铲起而对挖掘物进行挖掘。在专利文献1所记载的挖掘装置中,例如,存在难以将挖掘土量调整为任意值的问题。
9.本发明是鉴于上述情况而作出的,其目的在于,提供一种能够容易地将挖掘土量调整为任意值的挖掘信息处理装置、工作装置械、挖掘辅助装置及挖掘信息处理方法。
10.用于解决问题的技术方案
11.本发明一实施方式是一种挖掘信息处理装置,其具备:获取部,其获取用多个点的位置信息表示挖掘对象物的对象物位置信息;挖掘土量估计部,其基于表示所述铲斗的位置与姿势的铲斗位置姿势信息和所述对象物位置信息,依次估计并输出在该时刻使所述铲斗铲入时通过所述铲斗获得的挖掘土量。
12.发明效果
13.根据本发明的挖掘信息处理装置、工作装置械、挖掘辅助装置及挖掘信息处理方法,能够容易地将挖掘土量调整为任意值。
附图说明
14.图1是表示本发明一实施方式的液压挖掘机的结构例的立体图。
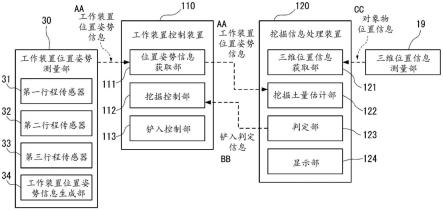
15.图2是表示图1所示的工作装置位置姿势测量部30、工作装置控制装置110及挖掘信息处理装置120的结构例的框图。
16.图3是简化表示图1所示的液压挖掘机1的侧视图。
17.图4是表示图2所示的工作装置机控制装置110和挖掘信息处置装置120的动作例的系统流程图。
18.图5是表示图2所示的挖掘土量估计部122的动作例的流程图。
19.图6是表示图1所示的三维位置信息测量部19测量的点云数据400的例子的示意图。
20.图7是示意性表示图1所示的铲斗8的侧视图。
21.图8是示意性表示图1所示的三维位置信息测量部19测量的点云数据400的例子的侧视图。
22.图9是表示本实施方式中的点云数据400的例子的示意图。
23.图10是示意性表示图1所示的三维位置信息测量部19测量的点云数据400的例子的侧视图。
24.图11是示意性表示图1所示的三维位置信息测量部19测量的点云数据400的例子的侧视图。
25.图12是表示本实施方式中的挖掘土量随时间推移的例子的示意图。
具体实施方式
26.以下参照附图对本发明的实施方式进行说明。需要说明的是,在各图中对相同或对应的结构使用相同的符号并适宜省略说明。
27.图1是表示作为本发明一实施方式的工作装置械的液压挖掘机1的结构例的立体图。图2是表示图1所示的工作装置位置姿势测量部30、工作装置控制装置110及挖掘信息处理装置120的结构例的框图。图3是简化表示图1所示的液压挖掘机1的侧视图。
28.图1所示的液压挖掘机1具有作为主体部的车辆主体1b和工作装置2。车辆主体1b具有作为回转体的上部回转体3和作为行驶体的行驶装置5。上部回转体3在发动机室3eg的内部收容有作为动力产生装置的发动机及液压泵等装置。在本实施方式中,液压挖掘机1例如能够使用柴油发动机等内燃机作为动力产生装置即发动机。但是,动力产生装置不限于内燃机。液压挖掘机1的动力产生装置例如也可以是组合了内燃机、发电电动机以及蓄电装置的所谓混合动力方式的装置。另外,液压挖掘机1的动力产生装置也可以不具有内燃机而是组合了蓄电装置和发电电动机的装置等。
29.上部回转体3具有驾驶室4。液压挖掘机1的操作员乘坐在该驾驶室4中操纵液压挖掘机1。即,液压挖掘机1的操作员在驾驶室4内使工作装置2动作或使上部回转体3回转,或者通过行驶装置5使液压挖掘机1行驶。在驾驶室4设置有显示各种信息的显示装置40以及未图示的、由操作员操作的工作装置2的操纵装置和行驶装置5的操纵装置等。在图1所示的例子中,驾驶室4设置于上部回转体3的与配置有发动机室3eg的一侧相反的一侧。但是,驾驶室4和发动机室3eg的位置关系不限于该例。在上部回转体3的上方安装有扶手9。
30.行驶装置5以能够以回转轴rz为中心相对于行驶装置5回转的方式搭载上部回转体3。行驶装置5具有履带5a及5b。行驶装置5的设置于左右的液压马达5c中的一方或两方驱动。通过行驶装置5的履带5a及5b旋转,使液压挖掘机1行驶。工作装置2安装于上部回转体3的驾驶室4的侧方侧。行驶装置5具备测量上部回转体3的回转角度的传感器。
31.此外,液压挖掘机1也可以是具备行驶装置的挖掘机,该行驶装置具备轮胎来代替履带5a及5b,能够将发动机的驱动力经由传动装置传递至轮胎而行驶。作为这种形式的液压挖掘机1,例如有轮式液压挖掘机。
32.对于上部回转体3来说,配置有工作装置2及驾驶室4的一侧为前,配置有发动机室3eg的一侧为后。上部回转体3的前后方向为y方向。朝前时的左侧为上部回转体3的左,朝前时的右侧为上部回转体3的右。上部回转体3的左右方向也称为宽度方向或x方向。对于液压挖掘机1或车辆主体1b来说,以上部回转体3为基准行驶装置5侧为下,以行驶装置5为基准上部回转体3侧为上。上部回转体3的上下方向为z方向。在将液压挖掘机1沿水平面设置的情况下,下为垂直方向、即重力的作用方向侧,上为与垂直方向相反的一侧。该xyz坐标系是以液压挖掘机1(上部回转体3)为基准的坐标系,在本实施方式中称为局部坐标系。此外,图1及其它图所示的x、y及z的箭头表示局部坐标系中的各方向,但不特定原点的位置。
33.工作装置2具有大臂6、小臂7、作为工作具的铲斗8、大臂缸10、小臂缸11以及铲斗缸12。大臂6的基端部经由大臂销13能够转动地安装于上部回转体3的前端部。小臂7的基端部经由小臂销14能够转动地安装于大臂6的前端部。在小臂7的前端部经由铲斗销15安装有铲斗8。铲斗8以铲斗销15为中心转动。铲斗8在与铲斗销15相反的一侧安装有多个斗齿8b。齿尖8t为斗齿8b的前端。另外,在本实施方式中,将铲斗上缘8e的刮擦面称为铲斗面8s。需要说明的是,铲斗8也可以不具有多个斗齿8b。即,也可以是齿尖通过钢板而形成为笔直形状的铲斗,而不具有图1所示那样的斗齿8b。
34.图1所示的大臂缸10、小臂缸11以及铲斗缸12分别是由从液压泵喷出的液压油的压力驱动的液压缸。大臂缸10驱动大臂6,使其升降。小臂缸11驱动小臂7,使其绕小臂销14转动。铲斗缸12驱动铲斗8,使其绕铲斗销15转动。
35.另外,工作装置2具备工作装置位置姿势测量部30。如图2所示,工作装置位置姿势测量部30具备第一行程传感器31、第二行程传感器32、第三行程传感器33以及工作装置位置姿势信息生成部34。第一行程传感器31设置于大臂缸10,第二行程传感器32设置于小臂缸11,第三行程传感器33设置于铲斗缸12。第一行程传感器31检测大臂缸10的长度即大臂缸长且将其向工作装置位置姿势信息生成部34输出。第二行程传感器32检测小臂缸11的长度即小臂缸长且将其向工作装置位置姿势信息生成部34输出。第三行程传感器检测铲斗缸12的长度即铲斗缸长且将其向工作装置位置姿势信息生成部34输出。
36.如果大臂缸长、小臂缸长及铲斗缸长确定,则工作装置2的姿势被确定。此外,第一行程传感器31、第二行程传感器32及第三行程传感器33也可以是角度检测器等。
37.工作装置位置姿势信息生成部34根据第一行程传感器31检测出的大臂缸长来计算局部坐标系中的大臂6相对于与水平面正交的方向(z轴方向)的倾斜角。工作装置位置姿势信息生成部34还根据第二行程传感器32检测出的小臂缸长来计算小臂7相对于大臂6的倾斜角。工作装置位置姿势信息生成部34还根据第三行程传感器33检测出的铲斗缸长来计算铲斗8相对于小臂7的倾斜角。另外,工作装置位置姿势信息生成部34基于工作装置2的三维形状信息(尺寸信息)、和大臂6、小臂7及铲斗8的各倾斜角,生成并输出在局部坐标系中表示工作装置2的姿势及位置的信息即工作装置位置姿势信息。工作装置位置姿势信息包含表示铲斗8的位置和角度(姿势)的信息。
38.在上部回转体3的上部安装有天线21及22。天线21及22用于检测液压挖掘机1的当
前位置。天线21及22例如与工作装置控制装置110(或其周边电路)连接。工作装置控制装置110(或其周边电路)使用天线21及22接收来自rtk-gnss(real time kinematic-global navigation satellite systems、gnss是指全球导航卫星系统)的电波,检测液压挖掘机1的当前位置。与天线21及22接收到的gnss电波对应的信号被输入到工作装置控制装置110,计算全局坐标系中的天线21及22的设置位置。作为全球导航卫星系统的一例,可以举出gps(global positioning system:全球定位系统),但全球导航卫星系统不限于此。
39.如图1所示,天线21及22优选设置于上部回转体3的上方、在液压挖掘机1的左右方向即宽度方向上分离的两端位置处。在本实施方式中,天线21及22安装在分别安装于上部回转体3的宽度方向两侧的扶手9。天线21及22安装在上部回转体3上的位置不限于扶手9,但天线21及22被设置于尽可能远离的位置时,液压挖掘机1的当前位置的检测精度提高,因而是优选。另外,优选将天线21及22设置于尽量不妨碍操作员的视野的位置。
40.另外,液压挖掘机1具备三维位置信息测量部19。三维位置信息测量部19例如设置于驾驶室4的上方,如图3所示,在多个点(多个测量点)测量存在于包含铲斗8和土砂、土石等挖掘对象物300的测量范围sa内的物体(对象物)的三维位置,将测量点各自的三维位置转换为点云数据,且将该点云数据作为对象物位置信息输出。在此,三维位置信息测量部19将例如用局部坐标系的x、y、z坐标表示各测量点的三维位置的点云数据作为对象物位置信息输出。此外,在本实施方式中,点云数据和对象物位置信息是同义的。但是,对象物位置信息不限于点云数据,例如也可以是表示实体模型等三维模型的信息。该点云数据包含表示挖掘前后的挖掘对象物300的形状(地形)的信息,并且包含表示挖掘中的铲斗8内外的挖掘对象物300的形状的信息。三维位置信息测量部19例如能够使用三维激光测距仪、三维激光扫描仪、三维距离传感器、立体摄像头等构成。三维激光测距仪等也被称为lidar(light detection and ranging:雷达)等,相对于一定范围内的多个测定方向(x、y、z方向),一边依次扫描测定方向一边照射以脉冲状发光的激光,例如基于反射的散射光返回来为止的时间和照射方向来测量距离和朝向。在本实施方式中,三维位置信息测量部19使用lidar构成。在该情况下,三维位置信息测量部19在每一扫描周期依次存储及更新表示各测量点(各反射点)的测定结果的点云数据,并将其作为对象物位置信息输出。对象物位置信息是用多个点的位置信息表示挖掘对象物300的信息。该对象物位置信息例如通过多个测量点的各坐标信息来表示各测量点的各位置,并且通过连结相邻的各测量点的线或面来表示多个测量点的形状。图6表示本实施方式的三维位置信息测量部19测量出的点云数据400的例子。点云数据400包含多个测量点401的三维位置信息。需要说明的是,点云数据400包含与大臂6、小臂7、铲斗8及挖掘对象物300对应的多个测量点401的三维位置信息。此外,三维位置信息测量部19输出的点云数据不限于表示各测量点的三维坐标值的点云数据,也可以是表示至各测量点的距离和朝向的点云数据。需要说明的是,在使用立体摄像头构成三维位置信息测量部19的情况下,例如能够将图像识别出的多个规定的特征点设为测量点401。
41.另外,图1所示的液压挖掘机1具备图1及图2所示的工作装置控制装置110和挖掘信息处理装置(挖掘辅助装置)120。工作装置控制装置110控制工作装置2的大臂缸10、小臂缸11以及铲斗缸12,例如控制铲斗8的位置和姿势。在本实施方式中,工作装置控制装置110根据使用了规定的操纵装置的操作员的指示来手动控制铲斗8的位置和姿势,或者基于预先设定的位置、轨迹来自动控制铲斗8的位置和姿势。另外,在本实施方式中,工作装置控制
装置110具有自动控制挖掘作业的功能。挖掘作业的自动控制例如能够由如下的多个控制的组合构成。即,挖掘作业的自动控制例如能够由铲斗8向挖掘开始位置的移动控制、用铲斗8掘取挖掘对象物300的动作的控制即挖掘控制(图3)、用铲斗8铲入挖掘对象物300的动作的控制即铲入控制(图3)、铲斗8向倒土位置(或装载位置)的移动控制及倒土控制(装载控制)构成。本实施方式的工作装置控制装置110自动进行这些控制中的至少挖掘控制、铲入控制以及从挖掘控制向铲入控制的切换控制。
42.图2所示的工作装置控制装置110例如可以使用微型计算机、fpga(field programmable gate array:现场可编程门阵列)等计算机或者计算机与其周边电路或周边装置等构成。而且,作为由计算机、周边电路、周边装置等硬件和计算机所执行的程序等软件的组合构成的功能性结构,工作装置控制装置110至少具备位置姿势信息获取部111、挖掘控制部112及铲入控制部113。
43.位置姿势信息获取部111例如以规定周期从工作装置位置姿势测量部30反复获取通过工作装置位置姿势信息生成部34生成并输出的工作装置位置姿势信息。另外,位置姿势信息获取部111将所获取的工作装置位置姿势信息向挖掘信息处理装置120输出。
44.挖掘控制部112基于位置姿势信息获取部111所获取的工作装置位置姿势信息,例如以使铲斗8的齿尖8t的轨迹与在用铲斗8掘取挖掘对象物300的动作中设为目标的轨迹一致的方式控制铲斗8的位置和姿势。在掘取的动作中设为目标的轨迹例如能够通过挖掘控制部112或未图示的其它控制部基于挖掘土量的目标值或挖掘形状的目标值和地形形状等来决定。另外,挖掘控制部112基于挖掘信息处理装置120输出的铲入判定信息进行从挖掘控制向铲入控制的切换控制。
45.铲入控制部113根据来自挖掘控制部112的指示,例如以使铲斗8的齿尖8t的轨迹与在用铲斗8铲入挖掘对象物300的动作中设为目标的轨迹一致的方式控制铲斗8的位置和姿势。在铲入动作中设为目标的轨迹例如能够设为以使铲斗8不再掘取挖掘对象物300,以铲斗面8s与垂直方向正交的姿势且移动至规定的高度的轨迹。
46.另外,挖掘信息处理装置120能够与工作装置控制装置110同样地作为单体、或者与工作装置控制装置110或液压挖掘机1的其它控制装置作为一体,例如能够使用微型计算机、fpga等计算机、或者计算机和其周边电路或周边装置等构成。而且,作为由计算机、周边电路、周边装置等硬件、和计算机执行的程序等软件的组合构成的功能性结构,挖掘信息处理装置120具备三维位置信息获取部(获取部)121、挖掘土量估计部122、判定部123及显示部124。
47.三维位置信息获取部121例如以规定的周期从三维位置信息测量部19反复获取用多个点的位置信息表示挖掘对象物的对象物位置信息(点云数据400)并将其向挖掘土量估计部122输出。
48.挖掘土量估计部122基于从位置姿势信息获取部111输入的表示铲斗8的位置与姿势的铲斗位置姿势信息和三维位置信息获取部121获取的对象物位置信息,依次估计并输出在该时刻使铲斗8铲入时由铲斗8获得的挖掘土量sva。挖掘土量估计部122可以将估计挖掘土量sva的结果例如t通过挖掘土量sva的体积的值表示并输出,也可以通过挖掘土量sva的重量的值表示并输出,或者也可以通过表示挖掘土量sva的体积或重量相对于规定的基准值的比率的值表示并输出。此外,从体积向重量的转换例如可以如下进行。即,例如能够
通过缸压力、工作装置姿势来计算第一次挖掘作业后(铲起状态)的挖掘土量的重量,并求出该计算出的重量和所估计的挖掘土量的关系(比重等),利用该关系将体积转换为重量。
49.并且,在本实施方式中,挖掘土量估计部122估计图7所示的铲斗8的内部积存的土量即铲斗内土量svi,并且估计预测为铲斗8将要挖取的土量即铲斗外土量svo,合计铲斗内土量svi和铲斗外土量svo来计算挖掘土量sva。即,挖掘土量估计部122通过挖掘土量sva=铲斗内土量svi+铲斗外土量svo的公式来计算挖掘土量sva。此外,图7是示意性表示挖掘动作中的铲斗8的侧视图(从x方向观察的图)。图7表示通过铲斗8的挖掘动作而铲斗8跟前的挖掘对象物300(地形)从挖掘前的地形隆起的状态。
50.另外,如图7及图9所示,挖掘土量估计部122从对象物位置信息(点云数据400)中提取在铲斗8的宽度8w内使铲斗8以铲斗销15为中心旋转的情况下位于铲斗齿尖8t所描绘的圆8a的内侧的测量点402,并基于所提取的测量点402的位置信息来估计挖掘土量。
51.在此,参照图5~图11对挖掘土量估计部122估计挖掘土量时的动作例进行说明。图5是表示挖掘动作中挖掘土量估计部122以规定周期反复估计挖掘土量时的一周期量动作的例子的流程图。即,挖掘土量估计部122在挖掘动作中以规定周期反复执行图5所示的处理。另外,图8、图10及图11是示意性表示在挖掘控制时实际获取的点云数据400的例子的侧视图(从x方向观察的图)。另外,图9是表示点云数据400的例子的示意图。
52.如图5所示,挖掘土量估计部122首先从由位置姿势信息获取部111获取的工作装置位置姿势信息获取铲斗8的位置及角度信息(步骤s101)。接着,挖掘土量估计部122从对象物位置信息(点云数据400)提取铲斗宽度8w内的点云(步骤s102),进而提取在铲斗销15中心的铲斗齿尖8t的圆8a的内侧比铲斗面8s靠跟前的点云(步骤s103)。图9表示在步骤s102及步骤s103中从点云数据400(多个测量点401)提取的点云(多个测量点402)的例子。在此,铲斗宽度8w内如图9所示是指由沿着局部坐标系的y方向延伸的两根直线501及502夹着铲斗8的宽度8w的范围。另外,在铲斗销15中心的铲斗齿尖8t的圆8a的内侧比铲斗面8s靠跟前的范围是指在图7所示圆8a的内侧未进入比铲斗面8s靠铲斗8内侧的范围内。
53.接着,挖掘土量估计部122基于工作装置位置姿势信息和附图信息(尺寸信息),删除从小臂7、托架、连杆机构等工作装置2获取的点云(测量点402的一部分)(步骤s104)。
54.接着,挖掘土量估计部122估计铲斗内土量svi(步骤s105)。在步骤s105中,挖掘土量估计部122例如如下估计铲斗内土量svi。即,例如,挖掘土量估计部122首先从在步骤s102~步骤s104的处理中提取自点云数据400的多个测量点402中如图9所示确定跟前侧(驾驶室4侧)的测量点402(设为代表点a)和进深侧的测量点402(设为代表点b)这两个测量点。接着,如图8所示,挖掘土量估计部122将从x方向观察通过连结代表点a及代表点b而成的直线lab、铲斗面8s以及铲斗轮廓8c包围的下部(垂直方向下侧)的区域(进深:槽宽度8w)估计为铲斗内土量svi。
55.接着,挖掘土量估计部122估计铲斗外土量svo(步骤s106)。在步骤s106中,例如,挖掘土量估计部122如下估计铲斗外土量svo。即,挖掘土量估计部122例如分为从x方向观察连结步骤s105中确定的代表点a和代表点b而成的直线lab与铲斗面8s交叉的情况(图10)、和与铲斗面8s不交叉的情况(图11),通过两种计算方法估计铲斗外土量svo。首先,在直线lab与铲斗面8s交叉的情况下,如图10所示,挖掘土量估计部122将从x方向观察的由连结代表点a及代表点b的直线lab、和从铲斗面8s与齿尖8t朝向直线lab垂直向上延伸的直线
labt包围的区域(进深:槽宽度8w)估计为铲斗外土量svo。另外,如图11所示,在直线lab与铲斗面8s不交叉的情况下,挖掘土量估计部122将从x方向观察的、以代表点a、代表点b、铲斗销15以及齿尖8t为顶点的四边形的区域(进深:槽宽度8w)估计为铲斗外土量svo。
56.接下来,挖掘土量估计部122合计步骤s105中估计的铲斗内土量svi和步骤s106中估计的铲斗外土量svo来计算挖掘土量sva(步骤s107)。通过以上的处理,挖掘土量估计部122在挖掘动作中依次估计在该时刻使铲斗8铲入时通过铲斗8获得的挖掘土量sva。
57.另外,判定部123判定挖掘土量估计部122估计的挖掘土量是否已经达到目标挖掘土量,将判定结果作为铲入判定信息向挖掘控制部112输出。目标挖掘土量是铲斗8通过一次挖掘动作获得的挖掘对象物300的体积或重量的目标值。例如,能够由操作员设定、或者由挖掘控制部112自动地设定。另外,例如,在将挖掘应对物300装载到自卸车等作业的情况下反复多次的挖掘和装载时,例如能够通过调整最后一次的挖掘土量来高精度地控制装载土量。
58.显示部124将挖掘土量估计部122估计的挖掘土量的值作为数值或时间序列的图表显示在设置于驾驶室4内的显示装置40上。在操作员手动进行挖掘作业的情况下,操作员例如能够参照显示装置40上显示的挖掘土量的估计结果来进行从挖掘向铲入的切换操作。在该情况下,具备三维位置信息获取部(获取部)121、挖掘土量估计部122以及显示部124的挖掘信息处理装置120具有作为挖掘辅助装置的形态。
59.接着,参照图4对图2所示的工作装置机控制装置110和挖掘信息处置装置120的动作例进行说明。图4是表示自动进行一次挖掘控制和铲入控制情况下的图2所示的工作装置机控制装置110和挖掘信息处置装置120的动作例的系统流程图。例如,在预先设定有目标挖掘土量而且铲斗8向挖掘开始位置移动的状态下,在操作员指示了挖掘控制的开始的情况下开始图4所示的动作。当开始图4所示的动作时,在工作装置控制装置110中挖掘控制部112进行挖掘控制(步骤s11),并且基于铲入判定信息以规定周期反复判定是否切换为铲入控制(步骤s12)。另外,在挖掘信息处理装置120中,当开始图4所示的动作时,以规定周期反复进行挖掘土量估计部122估计挖掘土量(步骤s21),并且判定部123判定通过挖掘土量估计部122估计的挖掘土量是否已经达到目标挖掘土量(步骤s22)。
60.当挖掘土量达到目标挖掘土量的情况下,判定部123输出主旨为挖掘土量已经达到目标挖掘土量的铲入判定信息(在步骤s22中“yes”的情况)。挖掘控制部112在接收到主旨为挖掘土量已经达到目标挖掘土量的铲入判定信息的情况下,判定为进行向铲入控制的切换(在步骤s12中为“yes”),铲入控制部113进行铲入控制(步骤s13)。
61.图12是表示图4所示的动作中的挖掘土量随时间推移的例子的示意图。横轴为时间,纵轴为挖掘土量。当开始挖掘时,首先,铲斗内土量svi逐渐增加,铲斗内土量svi增加到一定程度后,铲斗外土量svo开始增加。而且,挖掘土量sva达到目标挖掘土量后,进行向铲入控制的切换。
62.如上述这样,根据本实施方式,因为能够在挖掘作业中依次估计挖掘土量,所以能够容易地将挖掘土量调整为任意值。
63.以上,参照附图对该发明的实施方式进行了说明,但具体的结构不限于上述实施方式,还包含不脱离该发明的主旨的范围的设计变更等。
64.例如,液压挖掘机1可以是对车辆主体1b和工作装置2进行无人自动控制的类型,
也可以进行远程操作的类型2,还可以是将自动控制和远程控制或基于操作员的手动控制组合起来进行控制的类型。另外,在上述实施方式中,列举了主要使用局部坐标系中的坐标信息的情况,但也可以使用转换为全局坐标系的坐标信息。
65.另外,在上述实施方式中,计算机执行的程序的一部分或全部可以经由计算机可读取的记录介质、通信线路来发布。
66.工业上的可利用性
67.根据本发明的各方式,能够容易地将挖掘土量调整为任意值。
68.附图标记说明
[0069]1…
液压挖掘机
[0070]2…
工作装置
[0071]8…
铲斗
[0072]
8t
…
齿尖
[0073]
15
…
铲斗销
[0074]
19
…
三维位置信息测量部
[0075]
30
…
工作装置位置姿势测量部
[0076]
110
…
工作装置控制装置
[0077]
111
…
位置姿势信息获取部
[0078]
112
…
挖掘控制部
[0079]
113
…
铲入控制部
[0080]
120
…
挖掘信息处理装置
[0081]
121
…
三维位置信息获取部(获取部)
[0082]
122
…
挖掘土量估计部
[0083]
123
…
判定部
[0084]
124
…
显示部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1