一种河道冲浆、清底智能一体作业机械的制作方法
1.本发明属于河道治理机械领域,具体涉及一种河道冲浆、清底智能一体作业机械。
背景技术:
2.河道淤积己日益影响到防洪、排涝、灌溉、供水、通航等各项功能的正常发挥,为恢复河道正常功能,促进经济社会的快速持续发展,需要进行河道清淤疏浚工程,使河道通过治理变深、变宽,河水变清,群众的生产条件和居住环境得到明显改善。
3.目前河道清理时,一般先进行围堰,每一分段施工长度初拟为200~300米左右,围堰采用袋装砂土叠筑,迎水面铺编织布防渗并用袋装砂土压盖,袋装砂土叠筑时须做到排列密实、整齐。然后进行抽水,采用污水泵日夜不停地抽水。围堰内水抽干后,需要将河道底部的固体垃圾、淤泥清理。固体垃圾的清理,采用人工或机械进行。淤泥的处理一般通过清水管进行冲浆,使淤泥混合于水变稀后再通过泥浆泵吸走,通过污泥固化设备压滤后运输至指定地点弃放。
4.现有的冲浆、清底作业工作条件较为恶劣,主要采用人工进行,工人站立于淤泥中,或乘坐简易的浮筒在河水中进行冲浆,再拖曳较重的泥浆泵进行污水的吸取,淤泥存在各种致病菌,尤其在酷暑、严寒时,条件较为艰苦。人工作业还容易发生溺水等安全事故,因此亟待设计一款河道冲浆、清底智能一体作业机械,减少人工作业的劳动强度与危险性。
技术实现要素:
5.针对现有技术所存在的上述不足,本发明的目的是提供一种河道冲浆、清底智能一体作业机械,可自由行驶在抽干后的河道,冲浆、清底、除障作业通过机械化进行,减少人工作业的劳动强度,极大提高工作效率与安全性。
6.为了实现上述目的,本发明提供一种河道冲浆、清底智能一体作业机械,包括车体、车架、除障机构、行走机构、冲吸机构,
7.所述车体安装在行走机构上,车体包括驾驶室,车体后部的配重块替换为发电机组,发电机组为冲吸机构供电,车体可通过底盘旋转,车体上安装有除障机构,
8.所述车架位于车体底部,与车体通过底盘连接,车架中心安装有液压接头,
9.所述除障机构包括动臂、爪杆、旋转捞爪,所述动臂与车体铰接,通过第一液压油缸旋转,所述爪杆后部与动臂铰接,爪杆通过第二液压油缸旋转,爪杆前端安装有旋转捞爪,旋转捞爪可360度转动,捞取障碍物,
10.所述行走机构包括两组履带、浮箱,浮箱位于车架两侧,履带包覆在浮箱外侧,履带通过液压驱动,
11.所述冲吸机构包括摆动架、移动架、悬臂吊、浮筒、泥浆泵、自动冲水嘴,所述摆动架一端铰接在车架一侧,通过第三液压油缸进行摆动,摆动架另一端安装有悬臂吊、移动架,所述悬臂吊的吊钩与浮筒连接,浮筒上安装有泥浆泵,所述泥浆泵吸取污水,连接有输泥管。所述移动架包括可水平移动的两根伸缩柱,所述伸缩柱受液压驱动伸缩,每根伸缩柱
上安装有一个台座,所述自动冲水嘴活动连接于台座,自动冲水嘴的动作受驾驶室的操控台控制。
12.进一步地,所述自动冲水嘴两端安装有转架,所述转架安装在自动调节座上,所述自动调节座上安装有伺服电机,伺服电机带动转架旋转,所述自动调节座铰接在固定于台座的支架上,所述自动调节座通过第四液压油缸旋转。
13.进一步地,所述旋转捞爪包括爪座、支撑杆、连接块、液压马达、外齿轮、爪体,爪座通过两个连接块与爪杆上的第五液压油缸连接,所述爪座上安装有液压马达,所述液压马达驱动外齿轮,外齿轮带动爪体旋转。所述爪体有多个,带有尖刺,通过贯穿的两根支撑杆连接。
14.进一步地,所述台座上设置有摄像头,通过有线或无线方式与驾驶室内的显示器连接。
15.进一步地,所述车体上设置有伸缩受电杆,伸缩受电杆通过伸缩调节长度,伸缩受电杆顶部连接有集电环,可与岸上的支撑杆配合,将市电接入冲洗机构。
16.进一步地,所述车架上安装有推进器。
17.进一步地,所述两个台座上还设置有护栏、手动冲水嘴,手动冲水嘴底部连接有支撑座、轴承,手动冲水嘴底部安装在转架上,后部连接有扶手。
18.进一步地,所述台座与移动架的伸缩柱铰接,伸缩柱上安装有第六液压油缸,所述第六液压油缸的活塞与台座底部连接,台座可调节倾斜角度。
19.本发明的有益效果是:
20.本发明所述的河道冲浆、清底智能一体作业机械,能够在河道内通过浮箱及履带自由行走,通过旋转捞爪清理垃圾、障碍物,通过可水平移动、旋转朝向的自动冲水嘴对河坡淤泥进行冲浆,通过悬臂吊与浮筒调节泥浆泵的位置,自动冲水嘴采用plc控制系统,实现智能化控制,根据各河道情况进行调整,效率高、清淤效果好。极大减轻了冲浆、清底的劳动强度,增加安全性,提高工作效率。
附图说明
21.图1为本发明所述的河道冲浆、清底智能一体作业机械的侧视示意图;
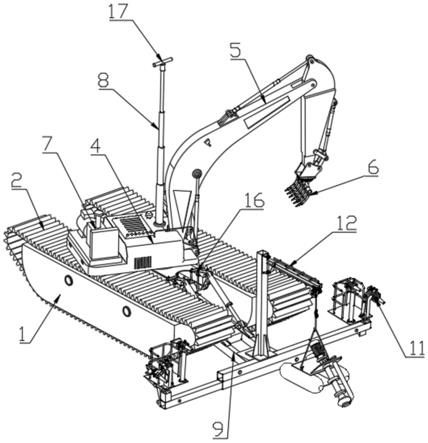
22.图2为本发明所述的河道冲浆、清底智能一体作业机械的立体示意图;
23.图3为本发明所述的旋转捞爪的放大立体示意图;
24.图4为本发明所述的车体的放大立体示意图;
25.图5为本发明所述的冲吸机构的放大立体示意图;
26.图6为本发明所述的冲水嘴及其附件的放大立体示意图。
27.图中:1、浮箱;2、履带;3、底盘;4、车体;5、动臂;6、旋转捞爪;601、爪座;602、支撑杆;603、连接块;604、液压马达;605、外齿轮;606、爪体;7、发电机组;8、伸缩受电杆;9、摆动架;10、移动架;11、自动冲水嘴;1101、伺服电机;1102、转架;12、悬臂吊;13、浮筒;14、泥浆泵;15、台座;16、车架;17、集电环;18、手动冲水嘴;19、护栏;20、液压接头。
具体实施方式
28.下面结合附图和具体实施例详细描述一下本发明的具体内容。
29.实施例一:
30.如图1、2所示,一种河道冲浆、清底智能一体作业机械,包括车体4、车架16、除障机构、行走机构、冲吸机构。
31.所述车体4安装在行走机构上,车体4包括驾驶室,车体4后部的配重块替换为发电机组7,发电机组7为冲吸机构供电,车体4可通过底盘3旋转,车体4上安装有除障机构。
32.所述车架16位于车体4底部,与车体4通过底盘3连接,车架16中心安装有液压接头20。所述车架16上安装有推进器。
33.如图2、3所示,所述除障机构包括动臂5、爪杆、旋转捞爪6,所述动臂5与车体4铰接,通过第一液压油缸旋转,所述爪杆后部与动臂5铰接,爪杆通过第二液压油缸旋转,爪杆前端安装有旋转捞爪6,旋转捞爪6可360度转动,捞取障碍物。所述旋转捞爪6包括爪座601、支撑杆602、连接块603、液压马达604、外齿轮605、爪体606,爪座601通过两个连接块603与爪杆上的第五液压油缸连接,所述爪座601上安装有液压马达604,所述液压马达604驱动外齿轮605,外齿轮605带动爪体606旋转。所述爪体606有多个,带有尖刺,通过贯穿的两根支撑杆602连接。
34.所述行走机构包括两组履带2、浮箱1,浮箱1位于车架16两侧,履带2包覆在浮箱1外侧,履带2通过液压驱动。
35.如图5所示,所述冲吸机构包括摆动架9、移动架10、悬臂吊12、浮筒13、泥浆泵14、自动冲水嘴11,所述摆动架9一端铰接在车架16一侧,通过第三液压油缸进行摆动,摆动架9另一端安装有悬臂吊12、移动架10,所述悬臂吊12的吊钩与浮筒13连接,浮筒13上安装有泥浆泵14,所述泥浆泵14吸取污水,连接有输泥管。所述移动架10包括可水平移动的两根伸缩柱,所述伸缩柱受液压驱动伸缩,每根伸缩柱上安装有一个台座15,所述自动冲水嘴11活动连接于台座15,自动冲水嘴11的动作受驾驶室的操控台控制。自动冲水嘴11采用plc控制系统,文本显示,实现智能化控制。自动冲水嘴11的开启和关闭,喷射的角度、摆动频率和流速通过自动化控制系统调整速度,频率可调,根据各河道情况进行预先设置,也可以预设各种模式,一键设定。效率高、清淤效果好。
36.如图6所示,所述台座15与移动架10的伸缩柱铰接,伸缩柱上安装有第六液压油缸,所述第六液压油缸的活塞与台座15底部连接,台座15可调节倾斜角度。所述自动冲水嘴11两端安装有转架1102,所述转架1102安装在自动调节座上,所述自动调节座上安装有伺服电机1101,伺服电机1101带动转架1102旋转,所述自动调节座铰接在固定于台座15的支架上,所述自动调节座通过第四液压油缸旋转。
37.实施例二:
38.如图3所示,其他部分与实施例一相同,除了所述车体4上设置有伸缩受电杆8,伸缩受电杆8通过伸缩调节长度,伸缩受电杆8顶部连接有集电环17,可与岸上的支撑杆602配合,将市电接入冲洗机构,代替发电机组以节约用电成本。
39.实施例三:
40.其他部分与实施例一或实施例二相同,除了所述台座15上设置有摄像头,通过有线或无线方式与驾驶室内的显示器连接。
41.实施例四:
42.如图6所示,其他部分与实施例一或实施例二相同,除了所述两个台座15上还设置
有护栏19、手动冲水嘴18,手动冲水嘴18底部连接有支撑座、轴承,手动冲水嘴18底部安装在转架1102上,后部连接有扶手。
43.本发明的工作原理:
44.本发明属于抓斗式清淤与泵吸式清淤结合的方式,包括除障、冲浆、清底三个作业,水力冲挖的自动冲水嘴11可水平移动,根据河道宽度进行调节,自动冲水嘴11的朝向、倾斜的角度可通过伺服电机1101、调节座、转架1102进行调节,而泥浆泵14通过悬臂吊12、浮筒13拖曳,悬臂吊12、自动冲水嘴11所在的台座15设置于车架16,高度可调节。冲水嘴将底泥搅成泥浆,通过泥浆泵14将泥浆吸出,淤泥经过排泥阀、输泥管而输送至岸上的堆场或带有污泥固化设备的运输车,整套机具都装备在水陆两用挖机上,一边移动一边作业。
45.驾驶员可在驾驶室中观测后侧河坡淤泥深度、水况等,通过操控杆控制自动冲水嘴11的旋转与移动,在复杂河道,工作人员可进入带有护栏19的台座15,操纵手动冲水嘴18进行冲浆。
46.本发明的动力系统包括液压与电动泵等,行走机构、旋转捞爪6、移动架10、动架、台座15、自动冲水嘴11支架的动作通过液压缸进行,多孔式液压接头20进行控制,提高安全性。对于悬臂吊12、自动冲水嘴11、手动冲水嘴18、泥浆泵14,可通过发电机组7产生的电力驱动,在条件允许时,也可通过伸缩受电杆8、集电环17,配合岸上的伸缩受电杆8接入市电,以节省成本。
47.本发明无需配备小中型的船只和设备,适合进入小型与中大型河道施工,对不同成分的垃圾均可同时进行清理,避免造成吸泥口堵塞的情况发生。
48.以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,上述实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1