振冲器控制系统和方法与流程
1.本发明涉及振冲器控制技术领域,特别涉及振冲器控制方法及系统。
背景技术:
2.振冲器是振冲法施工中的特制机具,它产生水平向振动力振挤填料及周围土体,而达到提高地基承载能力、减少沉降量、增加地基稳定性。一般振冲器的上部为潜水电机,下部为振动体;电机转动时通过弹性联轴节带动振动体的中空轴旋转,轴上装有偏心块,以产生水平向振动力;在中空轴内装有射水管和喷气管,水压可达0.4~0.6兆帕,依靠振动、管底射水和喷气将振冲器沉至所需深度,然后边提振冲器边填砂砾边振动,直到挤密填料及周围土体。
3.现有的振冲器传统控制方式为开环控制,主要是由人工进行控制,不能根据设置的传感器感知的实时振冲数据进行水压、水流量、气压和气流量的精准控制。
技术实现要素:
4.为解决上述问题,本发明提供了振冲器控制系统和方法,通过采集振冲器的工作电流设计振冲器的工作参数,将振冲器的工作电流与工作参数进行关联,构建对应的数学模型,实现对振冲器工作参数的自动化控制;振冲器工作过程中,实时获取传感器采集的振冲器实时运行数据,并反馈控制振冲器的工作,实现闭环控制,精准控制进气和进水的压力、流量,提高施工效率,保障施工质量。
5.本发明提供了振冲器控制系统,所述系统包括控制单元、用户交互终端、数据采集单元、振冲电机控制单元、进水控制单元和进气控制单元;
6.所述控制单元用于调节各模块电路有序工作,所述控制单元还用于向进水控制单元、进气控制单元和振冲电机控制单元输入对应的系统控制参数,所述控制单元通过协调数据采集单元、振冲电机控制单元、进水控制单元和进气控制单元进行闭环控制;
7.所述用户交互终端与所述控制单元连接,用于接收并输出错误报警信息和所述振冲电机控制单元的监控数据,并通过在终端上的交互指令或操作对所述错误报警信息对应的事项进行处理,以及选择所述振冲电机控制单元的控制状态;
8.所述数据采集单元包括数据采集接口和传感器单元,采集振冲器电机运行的电压、电流、频率等参数以及进水系统的进水的压力、流量和进气系统的气体压力、流量并通过接口传输至控制单元。
9.进一步的,所述系统还包括无线通信模块将所述控制单元与车载平板和/或手机监控终端进行通信,通过无线通信模块使工作人员通过车载平板和/或手机监控终端的app实现对振冲器的远程控制和监控。
10.进一步的,所述进水单元包括潜水泵、高压水泵、压力计、流量计和液位计,所述潜水泵和高压水泵的一端分别通入蓄水池中,所述高压水泵的另一端连接有振冲器,所述高压水泵与所述振冲器之间设有所述压力计和所述流量计。
11.进一步的,所述蓄水池中还设有所述液位计。
12.进一步的,所述进气单元包括空压机、压力计和流量计,所述空压机与所述振冲器连接,所述空压机和所述振冲器之间还设有所述压力计和所述流量计以及电控比例阀。
13.本发明还提供了振冲器控制方法,具体技术方案如下:
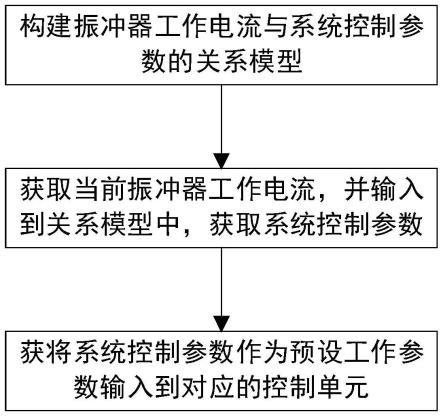
14.s1:构建振冲器工作电流与系统控制参数的关系模型;
15.s2:获取当前振冲器工作电流,并输入到所述关系模型中,获取所述系统控制参数;
16.s3:将所述系统控制参数作为预设工作参数输入到系统对应的控制单元。
17.进一步的,所述系统控制参数包括进水流量、进水压力、进气压力、进气流量、振冲电机频率;
18.所述关系模型为造孔速度与振冲器的工作电流构成的时变函数,如下所述:
19.y=a*(x+b)+y(n-1)
20.其中,y为造孔速度,x为振冲工作电流变化量,a为时变量,b、n为地层岩土组成结构参数;
21.根据造孔速度调节进水、进气压力和进水、进气流量。
22.进一步的,流量和压力采用pid加超前预测算法进行调节控制,通过当前的压力和流量数据预测下一秒系统预计的压力、流量值,再根据预测的值进行加权计算控制输出。
23.进一步的,在获得所述关系模型后通过实际的施工模型对模型关系进行修正。
24.进一步的,在将所述系统控制参数输入到系统对应的控制单元后,获取传感器实时采集振冲器的运行数据,根据所述运行数据反馈控制振冲器的工作。
25.本发明的有益效果如下:
26.1、通过关联振冲器的工作电流与其他五个控制参数的关系,构建了数学模型,基于数学模型获取系统控制参数,根据系统控制参数实现振冲器工作的控制。
27.2、采用闭环控制方法,通过传感器感知振冲器实时运行数据,反馈至控制中心进行闭环控制,精准控制进气和进水的压力、流量,提高了施工效率,保障施工质量,并降低了能耗。
28.3、控制中心通过无线通信方式实现振冲器的远程监控和遥控,可以实现远程操作作业,并解决现场接线复杂等问题;设有就地控制,当控制柜出现报警信息时,可以就地进行紧急处理。
附图说明
29.图1是本发明的方法流程示意图;
30.图2是本发明系统整体结构的示意图;
31.图3是本发明的进水单元结构示意图;
32.图4是本发明的进气单元结构示意图。
具体实施方式
33.在下面的描述中对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本
领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.实施例1
35.本发明的实施例1公开了振冲器控制系统,如图2所示,系统包括控制单元、用户交互终端、数据采集单元、振冲电机控制单元、进水控制单元和进气控制单元;
36.所述控制单元用于调节各模块电路有序工作,所述控制单元还用于向进水控制单元、进气控制单元和振冲电机控制单元输入对应的系统控制参数,所述控制单元通过协调数据采集单元、振冲电机控制单元、进水控制单元和进气控制单元进行闭环控制;
37.所述振冲电机控制单元主要使用变频器对振冲电机的频率、方向进行控制;
38.所述用户交互终端与所述控制单元连接,用于接收并输出错误报警信息和所述振冲电机控制单元的监控数据,并通过在终端上的交互指令或操作对所述错误报警信息对应的事项进行处理,以及选择所述振冲电机控制单元的控制状态,通过用户交互界面选择控制柜处于就地或远程遥控状态;
39.所述数据采集单元包括数据采集接口和传感器单元,采集振冲器电机运行的电压、电流、频率等参数以及进水系统的进水的压力、流量和进气系统的气体压力、流量并通过接口传输至控制单元;
40.所述系统还包括无线通信模块将所述控制单元与车载平板和/或手机监控终端进行通信。
41.如图3所示,所述进水单元包括潜水泵、高压水泵、压力计、流量计和液位计,所述潜水泵和高压水泵的一端分别通入蓄水池中,所述蓄水池中还设有所述液位计,所述高压水泵的另一端连接有振冲器,所述高压水泵与所述振冲器之间设有所述压力计和所述流量计;
42.液位计、压力计和流量计与控制中心连接,通过控制中心信号控制潜水泵工作,液位计用于检测蓄水池中的水量,当蓄水池中水量较少时,自动启动潜水泵给蓄水池注水;通过高压水泵作为动力源,高压阀门作为控制组件,对管道内的水流量和压力进行控制,使得出到振冲器外的水流满足设计要求;
43.压力和流量的调节,采用pid加超前预测算法进行调节控制,通过当前的压力和流量数据预测下一秒系统预计的压力、流量值,再根据预测的值进行加权计算控制输出,达到实时响应和精准控制的目的,提高工程施工质量。
44.如图4所示,所述进气单元包括空压机、压力计和流量计,所述空压机与所述振冲器连接,所述空压机和所述振冲器之间还设有所述压力计和所述流量计以及电控比例阀;
45.电控比例阀用于控制输出振冲器的气体的压力和流量值;压力计和流量计用于检测进气管道内的气压大小和流量数据,并反馈到控制中心,通过控制中心的信号控制电控比例阀的开度,进而控制进气单元管道的气压和流量。
46.实施例2
47.本发明的实施例2公开了振冲器控制方法,如图1所示,具体步骤流程如下:
48.s1:构建振冲器工作电流与系统控制参数的关系模型;
49.所述系统控制参数包括进水流量、进水压力、进气压力、进气流量、振冲电机频率;
50.所述关系模型为进水压力、进水流量、进气压力、进气流量与振冲器的工作电流构
成的对数函数。
51.在获得所述关系模型后通过实际的施工模型对模型关系进行修正。
52.s2:获取当前振冲器工作电流,并输入到所述关系模型中,获取所述系统控制参数;
53.所述系统控制参数包括进水流量、进水压力、进气压力、进气流量、振冲电机频率;
54.所述关系模型为造孔速度与振冲器的工作电流构成的时变函数,如下所述:
55.y=a*(x+b)+y(n-1)
56.其中,y为造孔速度,x为振冲工作电流变化量,a为时变量,b、n为地层岩土组成结构参数;
57.根据造孔速度调节进水、进气压力和进水、进气流量,其中,流量和压力采用pid加超前预测算法进行调节控制,通过当前的压力和流量数据预测下一秒系统预计的压力、流量值,再根据预测的值进行加权计算控制输出。
58.s3:将所述系统控制参数作为预设工作参数输入到系统对应的控制单元,即输入到振冲器电机控制单元、进气控制单元和进水控制单元。
59.在将所述系统控制参数输入到系统对应的控制单元后,获取传感器实时采集振冲器的运行数据,根据所述运行数据反馈控制振冲器的工作。
60.本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1