一种水面垃圾清理机器人
1.本发明涉及水面垃圾清理的技术领域,特别是涉及一种水面垃圾清理机器人。
背景技术:
2.随着生活水平以及城市绿化要求的提高,人们的环保意识的逐步增强,目前对水体污染的治理和水体垃圾的清理有着更加迫切的需求。水体环保问题愈加受社会关注,目前水体清理大多依靠人力进行打捞,人力物力耗费较大。水面垃圾不仅包括浮萍、水葫芦等水生植物,还包括漂浮在水面的生活垃圾,如白色垃圾、树枝等,这些水面垃圾会使水体污染,破坏水体内的生物链,对水体造成严重影响。为解决上述水污染问题,各种水面垃圾清理机器人应运而生。
3.然而现有的水面垃圾清理机器人采用吞进式和传送式进行水上垃圾的打捞,传统的传送带结构存在无法快速的捕捉到水瓶垃圾等易滑动的物体,打捞效果差,且打捞后的垃圾体积较大,导致水面垃圾清理机器人的内部存放空间不够,存在一定的局限性。
技术实现要素:
4.针对现有技术中的缺陷,本发明提供的一种水面垃圾清理机器人,可有效的对水面上的垃圾进行打捞,同时缩小垃圾的体积,便于存放更多的垃圾。
5.为了解决上述技术问题,本发明提出以下技术方案:
6.一种水面垃圾清理机器人,包括悬浮于水面上的壳体,所述壳体包括:推进机构,所述推进机构设有两组,两组推进机构设置在壳体的底端两侧,所述推进机构用于推动壳体的运动;清扫机构,所述清扫机构设有两组,两组清扫机构设置在壳体的两侧,所述清扫机构设置在推进机构上方,所述清扫机构用于将水面上堆积的垃圾清扫至壳体内部;抓取机构,所述抓取机构包括机械手,所述机械手转动的安装在壳体的顶端,所述机械手用于抓取壳体两侧以及后方残留的垃圾,机械手抓取垃圾至壳体内部;压缩机构,所述压缩机构设置在壳体的内部,所述压缩机构用于对壳体内部收集的垃圾进行压缩;排水机构,所述排水机构安装在壳体的侧面,排水机构用于排除壳体中多余的水分;控制机构,所述控制机构包括控制器,所述控制器用于控制推进机构、清扫机构、抓取机构与压缩机构运行。
7.进一步地,所述推进机构包括推进器与浮囊,所述推进器与浮囊设置在壳体的侧面底端,所述推进器与所述控制器电连接。
8.进一步地,所述壳体的前方开设有第一进料口,所述清扫机构清扫的垃圾通过第一进料口进入壳体内部。
9.进一步地,所述清扫机构包括延伸架、旋转电机与导流辊,所述延伸架固接在壳体的侧面,所述旋转电机安装在延伸架上,所述导流辊安装在旋转电机的输出端,两个清扫机构上的旋转电机的输出端呈反向转动。
10.进一步地,所述壳体上转动的安装有转盘,转盘设有两组,两组转盘上分别安装有第一摄像头与第二摄像头,所述第二摄像头与控制器电连接,所述控制器与所述旋转电机
电连接。
11.进一步地,所述壳体的顶端开设有第二进料口,机械手抓取的垃圾通过第二进料口进入壳体中,所述第一摄像头与控制器电连接,所述控制器与机械手电连接。
12.进一步地,所述压缩机构包括伸缩气缸与压板,所述伸缩气缸固接在壳体的内部顶端,所述压板安装在伸缩气缸的输出端。
13.进一步地,所述壳体的内部安装有渗水板,所述压板设置在渗水板的上方。
14.进一步地,所述排水机构包括排水泵、抽水管与排水管,所述排水泵固定在壳体的侧面,所述抽水管的一端接通在排水泵的抽水端,抽水管的另一端密封贯穿壳体位于渗水板的下方,所述排水管的一端接通在排水泵的排水端,排水管的另一端悬空设置。
15.由上述技术方案可知,本发明的有益效果:
16.1、本发明通过壳体上设有清扫机构,通过对清扫机构的设置,可将壳体前方的垃圾收集至壳体中,通过抓取机构的设置,抓取机构包括机械手,可将壳体的两侧以及后方的垃圾进行抓取至壳体中;
17.2、本发明通过压缩机构,对壳体中收集的垃圾进行压缩处理,便于壳体中存放更多的垃圾;
18.3、本发明通过排水机构的设置,便于将壳体中压缩时过滤的水分排出壳体中。
附图说明
19.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
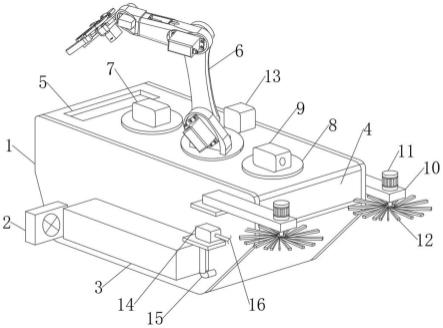
20.图1为本发明的整体结构示意图;
21.图2为本发明中壳体的侧面剖视图;
22.图3为本发明中各电子元件框架图。
23.附图标记:
24.1-壳体,2-推进器,3-浮囊,4-第一进料口,5-第二进料口,6-机械手,7-第一摄像头,8-转盘,9-第二摄像头,10-延伸架,11-旋转电机,12-导流辊,13-控制器,14-排水泵,15-抽水管,16-排水管,17-柜门,18-伸缩气缸,19-压板,20-渗水板。
具体实施方式
25.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
26.参阅图1-3:一种水面垃圾清理机器人,包括悬浮于水面上的壳体1,所述壳体1包括:推进机构,所述推进机构设有两组,两组推进机构设置在壳体1的底端两侧,所述推进机构用于推动壳体1的运动;清扫机构,所述清扫机构设有两组,两组清扫机构设置在壳体1的两侧,所述清扫机构设置在推进机构上方,所述清扫机构用于将水面上堆积的垃圾清扫至壳体1内部;抓取机构,所述抓取机构包括机械手6,所述机械手6转动的安装在壳体1的顶端,所述机械手6用于抓取壳体1两侧以及后方残留的垃圾,机械手6抓取垃圾至壳体1内部;
压缩机构,所述压缩机构设置在壳体1的内部,所述压缩机构用于对壳体1内部收集的垃圾进行压缩;排水机构,所述排水机构安装在壳体1的侧面,排水机构用于排除壳体中多余的水分;控制机构,所述控制机构包括控制器13,所述控制器13用于控制推进机构、清扫机构、抓取机构与压缩机构运行。
27.本实施例中,所述推进机构包括推进器2与浮囊3,所述推进器2与浮囊3设置在壳体1的侧面底端,所述推进器2与所述控制器13电连接;具体的,通过浮囊3的设置,便于整个壳体1浮在水面上,通过推进器2可控制整个壳体1在水面上游走。
28.本实施例中,所述壳体1的前方开设有第一进料口4,所述清扫机构清扫的垃圾通过第一进料口4进入壳体1内部;具体的,可便于通过清扫机构,清扫壳体周围的垃圾。
29.本实施例中,所述清扫机构包括延伸架10、旋转电机11与导流辊12,所述延伸架10固接在壳体1的侧面,所述旋转电机11安装在延伸架10上,所述导流辊12安装在旋转电机11的输出端,两个清扫机构上的旋转电机11的输出端呈反向转动;具体的,可通过旋转电机11的启动,带动导流辊12旋转,便于将垃圾导入壳体1中。
30.本实施例中,所述壳体1上转动的安装有转盘8,转盘8设有两组,两组转盘8上分别安装有第一摄像头7与第二摄像头9,所述第二摄像头9与控制器13电连接,所述控制器13与所述旋转电机11电连接;具体的,可通过第二摄像头9获取水面信息,并通过第二摄像头9传递至控制器13中,通过控制器13控制旋转电机11启动,带动导流辊12旋转,进而收集水面上的垃圾。
31.本实施例中,所述壳体1的顶端开设有第二进料口5,机械手6抓取的垃圾通过第二进料口5进入壳体1中,所述第一摄像头7与控制器13电连接,所述控制器13与机械手6电连接;具体的,看通过第一摄像头7,获取水面后方以及两侧的水面信息,并通过第一摄像头7获取的信息传递至控制器13中,通过控制器13控制机械手6的启动,抓取水面两侧以及后方残留的垃圾,有效的对垃圾进行清理。
32.本实施例中,所述压缩机构包括伸缩气缸18与压板19,所述伸缩气缸18固接在壳体1的内部顶端,所述压板19安装在伸缩气缸18的输出端,伸缩气缸18与控制器13电连接;具体的,可通过控制器13控制伸缩气缸18的启动,进而带动压板19下压,对收集的垃圾进行挤压,进而便于壳体1中存放更多的垃圾。
33.本实施例中,所述壳体1的内部安装有渗水板20,所述压板19设置在渗水板20的上方;具体的,可通过渗水板20的设置,便于挤压垃圾的过程中,对垃圾中的水分进行过滤。
34.本实施例中,所述排水机构包括排水泵14、抽水管15与排水管16,所述排水泵14固定在壳体1的侧面,所述抽水管15的一端接通在排水泵14的抽水端,抽水管15的另一端密封贯穿壳体1位于渗水板20的下方,所述排水管16的一端接通在排水泵14的排水端,排水管16的另一端悬空设置,排水泵14与控制器13电连接;具体的,可通过控制排水泵14,使得抽水管15可抽取壳体1中过滤出的水分,并经由排水管16排出壳体中。
35.其中,壳体1的后方铰接有柜门17。
36.工作原理:通过浮囊3,将整个清理机器人悬浮在水面上,并通过控制推进器2,控制整个机器人的游动,第二摄像头9抓取壳体1前方的垃圾,并将获取的信息传递至控制器13,通过控制器13传递指令给旋转电机11,使得旋转电机11带动导流辊12旋转,将壳体1前方的垃圾通过第一进料口4收集到壳体1中,第一摄像头7拍摄壳体1两侧以及壳体1后方的
垃圾,并将信息传递给控制器13,通过控制器13控制机械手6启动,抓取壳体1两侧以及壳体1后方的垃圾,并通过第二进料口5,将抓取的垃圾流入到壳体1内部,并通过控制器13,控制伸缩气缸18的启动,通过伸缩气缸18控制压板19的升降,进而可对垃圾进行压缩处理,便于存放更多的垃圾,在压缩的过程中,过滤的水分进入渗水板20下方,通过控制排水泵14,使得排水泵14可将渗水板20下方的水分抽取出壳体1中。
37.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1