一种水面漂浮物收集装置的制作方法
1.本发明属于水面漂浮垃圾打捞技术领域,更具体地,涉及一种水面漂浮物收集装置。
背景技术:
2.为保障泵站工程进水流态稳定性、提高泵站机组运行效率,泵站主体建筑多设计有进水前池,进水前池前设计拦污清污设备用于拦截打捞水草及水面漂浮物。经过运行发现,拦污清污设备可以有效的拦截打捞体积较大的水草和水面漂浮物,但根据拦污栅设计要求,栅条之间需保持一定间隙避免阻水,导致体积较小的零星水草和漂浮物(如泡沫、饮料瓶等)会从栅条间漏进进水前池,影响工程环境和机组运行安全。
3.工程运行管理人员通常采用人工打捞的方式,对进水前池漂浮物进行清理,但存在以下几个问题:
4.其一、打捞清理难。泵站进水前池水面距离地面高差较大,工作人员站在地面难以打捞清理。
5.其二、人工打捞存在较大安全隐患。工作人员需穿着救生衣,站在闸站分隔的隔墩上使用专用工具进行操作,存在较大的安全隐患。
6.其三、工作效率低。水面漂浮物会随着风向变化在不同区域聚集,人工打捞时还需漂浮物靠近工作面时方可开展。人工打捞次数频繁、单次打捞量有限,总体工作效率低下,提高了用工成本。
技术实现要素:
7.本发明的目的是针对现有技术中存在的不足,提供一种水面漂浮物收集装置,该水面漂浮物收集装置通过遥控模块远程控制推进装置推动浮体移动,使浮体在移动过程中通过收集口将水面漂浮的垃圾收集至污物斗内,污物斗上层的空间收满垃圾后通过升降机构自上而下的逐层升起,利用多层收纳槽逐层收集垃圾,增加垃圾收集量,适应水面漂浮垃圾的收集使用,解决人工打捞时需要站在岸边打捞承担落水风险和漂浮物聚散不定打捞困难的问题。
8.为了实现上述目的,本发明提供一种水面漂浮物收集装置,包括:
9.浮体,所述浮体的两端分别设置有推进装置和收集口;
10.污物斗,所述污物斗通过升降机构设置在所述收集口内,所述污物斗内从上到下依次设置有多个通过所述收集口与外部连通的收纳槽;
11.遥控模块,所述遥控模块与所述推进装置和所述升降机构通讯连接。
12.可选地,所述污物斗包括:
13.u型侧板和底板,所述底板与所述u型侧板的一端连接;
14.多个隔板,多个所述隔板与所述底板平行,多个所述隔板间隔设置在所述u型侧板之间形成多个所述收纳槽;
15.多个滤水孔,多个所述滤水孔分布在多个所述隔板、所述底板和所述u型侧板上。
16.可选地,所述污物斗的上端外周设置有与所述收集口上端相配合的限制台。
17.可选地,所述收集口的水平截面为矩形,所述升降机构包括四个伸缩杆,四个所述伸缩杆的固定端分别位于所述收集口的四角,四个所述伸缩杆的伸缩端与所述污物斗可拆卸连接。
18.可选地,所述浮体上设置有吊环。
19.可选地,所述浮体的上端设置有电池槽和处理器槽,所述电池槽和所述处理器槽设置有密封门。
20.可选地,所述浮体包括:
21.两个浮箱,两个所述浮箱间隔设置;
22.尾舱,所述尾舱设置在两个所述浮箱的一端,所述尾舱与两个所述浮箱构成u型结构。
23.可选地,两个所述浮箱远离所述尾舱的一端设置有前舱,所述前舱上设置有摄像头。
24.可选地,所述收集口的开口处设置有封闭机构,所述封闭机构包括:
25.水平推杆,所述水平推杆设置在所述前舱下方;
26.连接杆,所述连接杆的中部转动连接在两个所述浮箱之间,所述连接杆的一端与所述水平推杆的伸缩端连接,所述连接杆的另一端设置有挡板,所述挡板竖直状态时能够封闭所述收集口。
27.可选地,两个所述浮箱远离所述尾舱的一端设置有箭头部。
28.本发明提供一种水面漂浮物收集装置,其有益效果在于:
29.1、该水面漂浮物收集装置通过遥控模块远程控制推进装置推动浮体移动,使浮体在移动过程中通过收集口将水面漂浮的垃圾收集至污物斗内,污物斗上层的空间收满垃圾后通过升降机构自上而下的逐层升起,利用多层收纳槽逐层收集垃圾,增加垃圾收集量,适应水面漂浮垃圾的收集使用,解决人工打捞时需要站在岸边打捞承担落水风险和漂浮物聚散不定打捞困难的问题。
30.2、实现装置轻量化,收集打捞机械化、自动化,提高打捞清理的工作效率,保障工作人员人身安全
31.本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
32.通过结合附图对本发明示例性实施方式进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显,其中,在本发明示例性实施方式中,相同的参考标号通常代表相同部件。
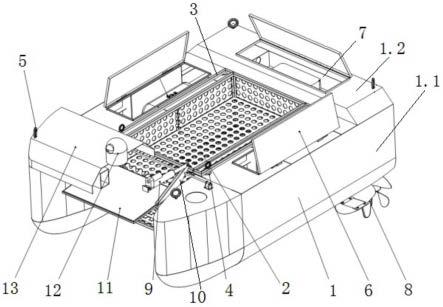
33.图1示出了根据本发明的一个实施例的一种水面漂浮物收集装置的结构示意图。
34.图2示出了根据本发明的一个实施例的一种水面漂浮物收集装置的污物斗的结构示意图。
35.附图标记说明:
36.1、浮体;1.1、浮箱;1.2、尾舱;2、污物斗;2.1、u型侧板;2.2、底板;2.3、隔板;3、限
制台;4、伸缩杆;5、吊环;6、电池槽;7、处理器槽;8、推进装置;9、水平推杆;10、连接杆;11、挡板;12、摄像头;13、前舱。
具体实施方式
37.下面将更详细地描述本发明的优选实施方式。虽然以下描述了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
38.图1示出了根据本发明的一个实施例的一种水面漂浮物收集装置的结构示意图;图2示出了根据本发明的一个实施例的一种水面漂浮物收集装置的污物斗的结构示意图。
39.如图1-2所示,一种水面漂浮物收集装置,包括:
40.浮体1,浮体1的两端分别设置有推进装置8和收集口;
41.污物斗2,污物斗2通过升降机构设置在收集口内,污物斗2内从上到下依次设置有多个通过收集口与外部连通的收纳槽;
42.遥控模块,遥控模块与推进装置8和升降机构通讯连接。
43.具体的,通过遥控模块远程控制推进装置8推动浮体1移动,使浮体1在移动过程中将水面通过收集口将漂浮的垃圾收集至污物斗2内,污物斗2上层的空间收满垃圾后通过升降机构自上而下的逐层升起,利用多层收纳槽逐层收集垃圾,增加垃圾收集量,适应水面漂浮垃圾的收集使用,解决人工打捞时需要站在岸边打捞承担落水风险和漂浮物聚散不定打捞困难的问题。
44.进一步,遥控模块采用cmos工艺制造的通用编解码电路编码芯片,信号发射和接收电路,包括设置在板体上的mcu模块、电流检测过流保护模块、电池电压检测模块、pwm端口、电流输出端口、无线模块、lod模块、dc-dc模块,板体外侧设置有防水胶层。
45.在本实施例中,污物斗2包括:
46.u型侧板2.1和底板2.2,底板2.2与u型侧板2.1的一端连接;
47.多个隔板2.3,多个隔板2.3与底板2.2平行,多个隔板2.3间隔设置在u型侧板2.1之间形成多个收纳槽;
48.多个滤水孔,多个滤水孔分布在多个隔板2.3、底板2.2和u型侧板2.1上。
49.具体的,通过u型侧板2.1和底板2.2构成簸箕结构适应收集口使用,方便收件漂浮垃圾,通过隔板2.3将簸箕结构分隔成多层,逐层收集漂浮垃圾,提高污物斗2的收集量,同时避免已经收集的垃圾受冲击散开分离需要反复收集,通过滤水孔滤除附着污水,在污物斗2上升时降低载重。
50.进一步,u型侧板2.1和底板2.2为铝型网板,滤水孔为铝型网板的网眼,上端面呈敞开式。
51.在本实施例中,污物斗2的上端外周设置有与收集口上端相配合的限制台3。
52.具体的,污物斗2通过限制台3配合收集口卡接。
53.进一步,升降机构通过驱动限制台3带动污物斗2升降。
54.在本实施例中,收集口的水平截面为矩形,升降机构包括四个伸缩杆4,四个伸缩杆4的固定端分别位于收集口的四角,四个伸缩杆4的伸缩端与污物斗2可拆卸连接。
55.具体的,通过四个伸缩杆4升降污物斗2。
56.在本实施例中,浮体1上设置有吊环5。
57.具体的,通过吊环5方便起吊移动收集装置。
58.在本实施例中,浮体1的上端设置有电池槽6和处理器槽7,电池槽6和处理器槽7设置有密封门。
59.具体的,通过电池槽6放置蓄电池,通过处理器槽7放置遥控模块,通过密封门避免流水进入电池槽6和处理器槽7损毁内部电子元件。
60.在本实施例中,浮体1包括:
61.两个浮箱1.1,两个浮箱1.1间隔设置;
62.尾舱1.2,尾舱1.2设置在两个浮箱1.1的一端,尾舱1.2与两个浮箱1.1构成u型结构。
63.具体的,通过两个浮箱1.1和尾舱1.2构成u型结构同时形成收集口,污物斗2设置在u型结构的开口内。
64.进一步,推进装置8设置在尾舱1.2下方,处理器槽7设置在尾舱1.2上端,蓄电池槽6设置在浮箱1.1上端,浮箱1.1由2mm厚铝板焊接制作,蓄电池槽6内放置12v 120ah锂电池,推进装置8包括无刷马达和螺旋桨。
65.在本实施例中,两个浮箱1.1远离尾舱1.2的一端设置有前舱13,前舱13上设置有摄像头12。
66.具体的,通过摄像头12远程传输视频数据,适应视觉盲角使用。
67.在本实施例中,收集口的开口处设置有封闭机构,封闭机构包括:
68.水平推杆9,水平推杆9设置在前舱13下方;
69.连接杆10,连接杆10的中部转动连接在两个浮箱1.1之间,连接杆10的一端与水平推杆9的伸缩端连接,连接杆10的另一端设置有挡板11,挡板11竖直状态时能够封闭收集口。
70.具体的,通过封闭机构在收集装置转向和倒退时封闭收集口,避免收集的垃圾逃逸。
71.在本实施例中,两个浮箱1.1远离尾舱1.2的一端设置有箭头部。
72.具体的,箭头部能减小水流阻力同时引导汇聚漂浮垃圾,避免收集装置行进过程中冲散漂浮垃圾。
73.本实施例水面漂浮物收集装置使用时,以配合泵站工程进水前池使用为例,使用前可在进水前池岸边设单臂起吊装置一台套,安装电动葫芦用于起吊漂浮物收集装置或污物斗2,之后使用者将收集装置放入进水前池内,通过遥控模块远程操作收集装置行进收集水面漂浮物,当污物斗2的最上层收集满垃圾后,远程操作升降机构将污物斗2升起一层,进而逐层收集垃圾,保证污物斗2的空间利用率,并在转向和倒退时通过封闭机构封闭收集口,避免已收集的垃圾逃逸,在视觉盲区内能够通过摄像头12观测水面进行收集,完成收集后将收集装置取走或更换污物斗2重复收集。
74.以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1