一种方坑挖土机器人及应用该挖土机器人的挖坑方法与流程
1.本发明涉及施工领域,具体是一种方坑挖土机器人及应用该挖土机器人的挖坑方法。
背景技术:
2.目前改扩建变电站小型独立设备时,需要挖掘标准形状的小型方坑,采用人工挖掘费时费力,且挖掘的坑道往往不是标准的方形坑,还存在较大误差,因此亟待解决。
技术实现要素:
3.为了避免和克服现有技术中存在的技术问题,本发明提供了一种方坑挖土机器人,本发明实现了小型方坑的自动挖掘工作。本发明还提供了一种应用该挖土机器人的挖坑方法。
4.为实现上述目的,本发明提供如下技术方案:一种方坑挖土机器人,包括如下组成部分:布置在地面上方的围板,各围板彼此配合围合形成方形的预挖坑区;基座,悬置在预挖坑区上方,其内部设置有动力源;伸缩护筒,沿铅垂方向铅垂固定在基座下方,底部开口的伸缩护筒内设置有将预挖坑区内的泥土挖出的挖掘部,所述伸缩护筒存在如下两种工作状态:夯击围板时,所述伸缩护筒筒体伸长至最大限度从而将挖掘部罩设在筒体内;围板的夯击工作结束后,所述伸缩护筒的筒体缩回从而露出挖掘部;夯锤,套设在伸缩护筒外且可相对于伸缩护筒长度方向往复运动,从而可自由落体运动后将围板沿铅垂方向夯入土壤中;松土座,设置在夯锤下方并与伸缩护筒套接配合,松土座底部沿铅垂方向设置有钢钎,夯锤可将松土座的钢钎夯入预挖坑区内;各所述钢钎均为表面均匀开设有喷射孔的空心钢钎,各钢钎的喷射孔通过钢钎的内腔与松土座内的高压液源连通,各所述钢钎插入预挖坑区后,高压液源通过钢钎向预挖坑区的土壤内喷射高压液体以浸润土壤;基座内的牵引系统通过牵引钢索将夯锤和/或松土座向上收回。
5.作为本发明进一步的方案:所述挖掘部包括液压式的挖臂以及固定在挖臂工作端的挖铲,所述挖臂固定在伸缩护筒内的回转座上,回转座可带动挖臂水平转动以更换挖掘方向。
6.作为本发明再进一步的方案:所述围板包括位于地面上方的可拆卸式的防护板,所述防护板的左右两侧对称开设有供泥土向外排出的卸料口,所述卸料口、预挖坑区以及挖铲的宽度彼此吻合,所述挖铲的铲身两端与围板前后两侧的板身贴合。
7.作为本发明再进一步的方案:所述伸缩护筒内设置有液压系统以驱动回转座沿铅垂方向运动。
8.作为本发明再进一步的方案:所述挖铲将泥土铲向卸料口处后,设置在回转座内的振动源向挖铲传递振动从而向卸料口外振落铲身上的泥土。
9.作为本发明再进一步的方案:所述松土座的外缘形状为围板的内缘形状吻合。
10.作为本发明再进一步的方案:所述围板为钢板,其板身底部呈尖锥状。
11.应用一种方坑挖土机器人的挖坑方法:包括如下步骤:s1、在预定区域上方放置围板,使其围合形成方形的预挖坑区;将挖土机器人移动至预挖坑区上方,确保伸缩护筒的轴线与预挖坑区的中心点重合;s2、牵引系统解除对夯锤以及松土座的牵引,使夯锤做自由落体运动从而向下撞击松土座以及围板后,重新向上收回夯锤,并重复上述动作,使得松土座的钢钎以及围板插入土壤至指定深度;s3、启动高压液源,通过钢钎喷洒高压液体从而浸润土壤;s4、牵引系统向上收回夯锤以及松土座使其悬置锁定,伸缩护筒缩回使挖臂露出,并在挖臂的工作端安装合适尺寸的挖铲;s5、先对预挖坑区的一侧进行挖掘作业,挖掘定量土壤后使挖铲的铲身与卸料口所在侧的围板板身抵接,向上移动挖臂直至挖铲的铲口与卸料口平齐,振动挖铲使泥土向卸料口外排出;s6、将预挖坑区内一侧的土壤排出后,收回挖臂使其离开预挖坑区,启动回转座将挖臂水平转动一百八十度,重复步骤s5从而完成预挖坑区内另一侧的挖掘作业;s7、将预挖坑区两侧地面堆积的土壤排空,拆除防护板,完成挖坑作业。
12.与现有技术相比,本发明的有益效果是:1、本发明在地面上设置围板从而围合形成预定的方形坑区,采用夯锤将围板夯入土中后,挖出围板围合范围内的土壤即可保留标准的方形坑,且由于围板的阻拦,可避免挖掘过程中发生塌方行为,确保了方形坑区的完整性;在挖掘工作前,伸缩护筒将挖臂罩设在其内部,对挖臂起防护作用的同时,还可以对松土座以及夯锤其导向作用,使其沿伸缩护筒轴向夯入地面,确保坑区形状、位置准确;在挖掘作业前,松土座的钢钎被夯入土壤,围定方形坑区域的同时,可同时对方形坑区进行松土作业,松土作业的同时可对围板形成导向作用,方便围板下行,提高了挖土效率。
13.2、本发明采用挖臂以及挖铲相配合来对预挖坑区进行挖掘作业,挖臂为传统的液压式挖臂,而挖铲则可拆卸更换尺寸从而适配不同预挖坑区的尺寸;挖铲的宽度设置为与预挖坑区宽度相等,挖铲挖掘过程中,挖铲的铲身与围板前后两端的板身彼此垂直,且挖铲两侧的铲身与围板前后两端的板身彼此贴合;挖铲铲出定量土壤后,挖臂移动挖铲,使挖铲的铲击端与围板左侧或右侧的板身抵接,则此时挖铲与围板配合形成v型区域,避免挖铲上的土壤滑落;挖铲向上移动至卸料口处后,回转座内的振动源振动挖铲即可向卸料口外完成单次的卸料工作。
14.3、本发明将挖臂固定在回转座上,使其可产生一百八十度的转动动作,解决了在狭窄坑区内液压挖臂只能完成单侧挖掘功能的问题,使其可离开预挖坑区后转向从而完成另一侧的挖掘工作;伸缩护筒内的液压系统可驱动回转座沿铅垂方向运动,提高了挖掘部对更深层土壤的挖掘能力。
15.4、本发明的钢钎可连接液压源,在插入土壤后进行灌水作业,从而浸润土壤,使其
更易被挖掘出,进一步提高了挖土效率;松土座的外缘形状与围板内缘形状吻合,提高了预挖坑区的松土率;围板材料为钢板,受冲击能力强,且其板身底部呈尖锥状,更易被夯入地面。
16.5、本发明的围板上设置有可拆卸式的防护板,通过观测防护板位置即可得知围板的夯入深度,挖掘作业时,土壤通过防护板板身上的卸料口向外排出,由于卸料口存在一定高度,卸出的土壤受防护板阻挡不易塌落回预挖坑区内,且防护板在挖掘作业时可起到警示作用,提示坑区的存在,提高作业时的安全性。
附图说明
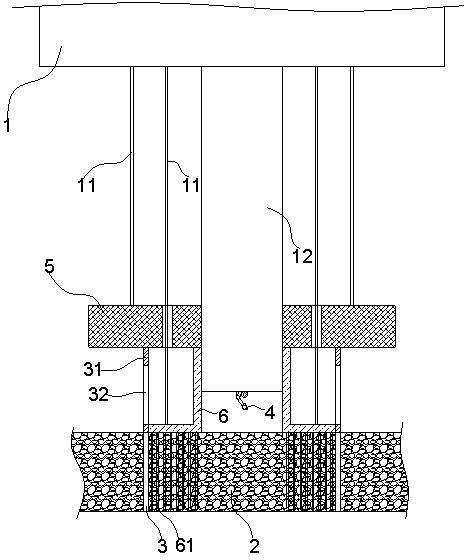
17.图1为本发明将围板夯入土壤后的第一工作状态示意图。
18.图2为本发明夯锤以及松土座被收回后的第二工作结构示意图。
19.图3为本发明开始挖掘作业时的第三工作状态示意图。
20.图4为本发明中松土座的仰视图。
21.图中:1、基座;11、牵引钢索;12、伸缩护筒;2、预挖坑区;3、围板;31、防护板;32、卸料口;4、挖掘部;41、回转座;42、挖臂;43、挖铲;5、夯锤;6、松土座;61、钢钎。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.请参阅图1~4,本发明实施例中,一种方坑挖土机器人,包括基座1以及沿铅垂方向固定在基座1下方的伸缩护筒12,其中基座1内设置有液压动力源以及电源等,为其他设备提供动力支持。基座1可与各类大型运输设备连接固定,从而被运输至任意地点悬置固定后,开始后续的挖掘作业。
24.选用合适尺寸的围板3,布置在地面上,使围板3彼此配合围合形成方形的预挖坑区2,围板3可被夯锤5撞入土壤至指定深度,围板3围合的土壤区域即为方坑区域。围板3位于地面上方的部分为可拆卸的防护板31,其中左右两侧的防护板31板身上开设有卸料口32以供后续泥土排出。卸料口32呈方形,卸料口32的宽度与预挖坑区2的宽度吻合。
25.为方便夯入土壤中,围板3的板底设计为尖锥状,围板3的材质为钢板。
26.挖铲43挖掘过程中,挖铲43的铲身与围板3前后两端的板身彼此垂直,且挖铲43两侧的铲身与围板3前后两端的板身彼此贴合。挖铲43铲出定量土壤后,挖臂42移动挖铲43,使挖铲43的铲击端与围板3左侧或右侧的板身抵接,则此时挖铲42与围板3配合形成v型区域,避免挖铲43上的土壤滑落。挖铲43向上移动至卸料口32处后,振动挖铲43即可向卸料口
32外完成单次的卸料工作。挖臂42为采购的现有技术,因此不再赘述。
27.伸缩护筒12为底部开口的伸缩筒,其筒体内设置有回转座41,伸缩护筒12内设置有液压系统从而驱动回转座41在沿铅垂方向运动从而进行高度调节,液压系统可以为液压伸缩杆。回转座41底部固定有液压式的挖臂42,挖臂42的工作端可拆卸式的安装有挖铲43。夯锤5进行夯击作业时,伸缩护筒12伸出从而将挖臂42保护起来,伸缩护筒12的筒口靠近地面,夯击作业结束后,伸缩护筒12收回,从而露出挖臂42,此时在挖臂42的工作端安装与预挖坑区2宽度吻合的挖铲43。
28.回转座41可带动挖臂42进行一百八十度的水平转动作业,从而更换挖掘方向。回转座41内设置有振动源,用于振落挖铲43铲出的泥土。振动源形式不限,优选为振动电机。
29.为实现夯击作业,伸缩护筒12外套设有夯锤5,基座1内的滑轮系统通过牵引钢索11牵引夯锤5提升,松动夯锤5后,夯锤5即可做自由落体运动,沿伸缩护筒12长度方向下落,从而将围板3夯入土壤中。
30.伸缩护筒12外还套设有松土座6,松土座6为组合式结构,包括套设在伸缩护筒12外的筒体组件,以及固定在筒体组件底部的板体组件。其中筒体组件高度与防护板31高度吻合,板体组件外缘尺寸与预挖坑区2尺寸吻合,板体组件底部沿铅垂方向均匀设置有钢钎61,夯锤5自由落体运动时,可撞击松土座6,使得钢钎61插入预挖坑区2内,起到松土效果。
31.松土座6可更换尺寸,以适配不同大小的方坑。基座1内设置有另一组与松土座6适配的牵引钢索11,夯锤5表面沿铅垂方向设置有开口供该组牵引钢索11穿过,从而可夯击结束后向上收回松土座6。
32.为提高松土效果,各钢钎61表面均开设有喷射孔,且各喷射孔均通过钢钎61与松土座6内的高压液源连通。这里的高压液源预先内置在松土座6内,液源通常为高压水,通过遥控信号控制作业。各钢钎61插入预挖坑区2后,高压液源启动,向土壤内喷水浸润土壤,便于后续挖掘作业。
33.伸缩护筒12的筒口处可安装摄像头从而实时传输预挖坑区2内的图像,以便于人工遥控挖掘进程,亦可通过预先的编程实现自动挖掘作业。
34.一种挖坑方法,包括如下步骤:s1、在预定区域上方放置围板3,使其围合形成方形的预挖坑区2;将挖土机器人移动至预挖坑区2上方,确保伸缩护筒12的轴线与预挖坑区2的中心点重合;s2、牵引系统解除对夯锤5以及松土座6的牵引,使夯锤5做自由落体运动从而向下撞击松土座6以及围板3后,重新向上收回夯锤5,并重复上述动作,使得松土座6的钢钎61以及围板3插入土壤至指定深度;s3、启动高压液源,通过钢钎61喷洒高压液体从而浸润土壤;s4、牵引系统向上收回夯锤5以及松土座6使其悬置锁定,伸缩护筒12缩回使挖臂42露出,并在挖臂42的工作端安装合适尺寸的挖铲43;s5、先对预挖坑区2的一侧进行挖掘作业,挖掘定量土壤后使挖铲43的铲身与卸料口32所在侧的围板3板身抵接,向上移动挖臂42直至挖铲43的铲口与卸料口32平齐,振动挖铲43使泥土向卸料口32外排出;s6、将预挖坑区2内一侧的土壤排出后,收回挖臂42使其离开预挖坑区2,启动回转座41将挖臂42水平转动一百八十度,重复步骤s5从而完成预挖坑区2内另一侧的挖掘作业;
s7、将预挖坑区2两侧地面堆积的土壤排空,拆除防护板31,完成挖坑作业。
35.以上结合具体实施例描述了本技术的基本原理,但是,需要指出的是,在本技术中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本技术的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本技术为必须采用上述具体的细节来实现。
36.本技术中涉及的器件、装置、设备、系统的方框图仅作为例示性的例子并且不意图要求或暗示必须按照方框图示出的方式进行连接、布置、配置。如本领域技术人员将认识到的,可以按任意方式连接、布置、配置这些器件、装置、设备、系统。诸如“包括”、“包含”、“具有”等等的词语是开放性词汇,指“包括但不限于”,且可与其互换使用。这里所使用的词汇“或”和“和”指词汇“和/或”,且可与其互换使用,除非上下文明确指示不是如此。这里所使用的词汇“诸如”指词组“诸如但不限于”,且可与其互换使用。
37.还需要指出的是,在本技术的装置、设备和方法中,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本技术的等效方案。
38.提供所公开的方面的以上描述以使本领域的任何技术人员能够做出或者使用本技术。对这些方面的各种修改对于本领域技术人员而言是非常显而易见的,并且在此定义的一般原理可以应用于其他方面而不脱离本技术的范围。因此,本技术不意图被限制到在此示出的方面,而是按照与在此公开的原理和新颖的特征一致的最宽范围。
39.为了例示和描述的目的已经给出了以上描述。此外,此描述不意图将本技术的实施例限制到在此公开的形式。尽管以上已经讨论了多个示例方面和实施例,但是本领域技术人员将认识到其某些变型、修改、改变、添加和子组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1