一种防止倾覆的大管径清淤机器人的制作方法
1.本发明涉及清淤机器人领域,具体为一种防止倾覆的大管径清淤机器人。
背景技术:
2.每年汛期,由于排水管网污泥淤积影响排水畅通,每当暴雨来袭,许多城市会出现路面积水,严重的甚至会引发交通中断,极大影响市民的日常出行。
3.目前国内外普遍采用的排水管网清淤方法有高压水射流清淤法、绞车清淤法、水冲刷清淤法、通沟机清淤法、清淤球以及拦蓄冲洗门等,这些方法都有各自的缺点和不足,最主要的是这些清淤方法都是为小管径排水管道清淤而设计的,都不太适用于比如箱涵这种大管径(管径≥0.8m)的排水管道的清淤;具体而言,高压水射流清淤法的设备运行成本较高,难以在国内广泛推广应用;绞车清淤法适用的管道管径范围相较于高压水射流清淤法更广,但该法首先需要人工下井进行穿管操作,井下恶劣的工作环境给工人带来了极大不便,而且存在作业安全隐患。
技术实现要素:
4.本发明为了弥补市场空白,提供了一种防止倾覆的大管径清淤机器人。
5.本发明的目的在于提供一种防止倾覆的大管径清淤机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种防止倾覆的大管径清淤机器人,包括:
7.冲击装置,所述冲击装置安装在机体的左上侧,且机体的底部通过履带行走结构进行驱动,同时机体的左侧安装有淤泥收集装置,并且淤泥收集装置的左下侧安装有剪切装置;机体的两侧均安装有防倾覆装置,且驱动缸安装在机体上,机体的顶板上安装有ccd摄像机;
8.剪切装置,所述剪切装置上的安装座内部活动安装有连接板,且连接板上固定设置有连接柱,同时连接柱远离连接板的一端与活动剪切片固定连接,驱动电机通过机座安装在安装座的内部,且安装座的表面分别安装有多组固定剪切片和活动剪切片;
9.淤泥收集装置,所述淤泥收集装置上的收集框内部分别安装有第一蛟龙和第二蛟龙,且收集框内部开设有收集孔,同时收集孔内安装有收集管,收集管上安装有污泥泵,且污泥泵通过机座安装在机体上,淤泥收集装置包括收集框、第一蛟龙、收集孔、第二蛟龙和转动电机,且转动电机安装在收集框的侧壁上,同时转动电机的输出轴与第二蛟龙的转轴固定,收集框的底部两侧安装有移动轮。
10.进一步的,所述冲击装置包括高压喷头、安装板、水管和固定架,且安装板上均匀安装有多组高压喷头。
11.进一步的,所述安装板上安装有水管,且水管远离安装板的一端与外界的水泵连通设置,同时水管通过固定架安装在淤泥收集装置上。
12.进一步的,所述高压喷头在安装板的底部倾斜设置,且高压喷头上的喷嘴与剪切装置的表面相对设置。
13.进一步的,所述剪切装置包括驱动块、固定剪切片、活动剪切片、连接柱、连接板、导向块、连动板、从动板、主动板、驱动电机和安装座,且固定剪切片、活动剪切片上均开设有切断刀面,同时两组切断刀面相对设置。
14.进一步的,所述连接板的表面均匀安装有八组连接柱,且八组连接柱端部均安装有活动剪切片,活动剪切片与固定剪切片的剖面均为直角梯形设置。
15.进一步的,所述连接板的底部两侧均安装有导向块,且导向块的内部开设有导向孔,同时导向孔内部插接有导向柱,并且导向柱设置为两组分别固定设置在安装座的内部两侧。
16.进一步的,所述连接板的底部铰接有从动板,且从动板的底部与主动板端部铰接,同时主动板远离从动板的一端与安装座的内部下侧设置的固定块铰接设置。
17.进一步的,所述驱动电机的输出轴上安装有连动板,且连动板的端部与驱动块连接在一起,同时驱动块活动设置在主动板内部开设的条形孔中,驱动电机通过连动板、主动板和从动板对连接板进行横向驱动。
18.进一步的,所述防倾覆装置包括接触轮、支撑板、限位块、安装框、导向杆、固定板和驱动缸,且驱动缸的活塞杆与固定板固定连接,同时固定板上安装有两组支撑板,支撑板端部活动设置有接触轮,且支撑板上安装有限位块,且限位块滑动设置在机体上安装的限位轨道中,固定板的底部两侧均安装有导向杆,且导向杆插接在安装框的内部。
19.与现有技术相比,本发明的有益效果是:
20.1.将污泥收集在淤泥收集装置的内部,并同时启动污泥泵的开关,使得淤泥收集装置内部的污泥在污泥泵的作业下,通过收集管进行排出到管道的外侧,完成对大管径内部的清淤工作,取代人工清淤的时候,省时省力,避免工作人员在管内工作的时候发生安全隐患;
21.2.高压喷头上的喷嘴与剪切装置的表面相对设置,使得自高压喷头喷出的高压水流,可直接喷射在剪切装置表面的污泥上,可对剪切装置表面的污泥进行冲散工作;
22.3.剪切装置在管道内部移动的时候,置于剪切装置表面的污泥在进入到安装座的表面之前,通过固定剪切片、活动剪切片对污泥进行剪切工作,对块状的污泥进行剪切,对污泥进行切断,便于通过淤泥收集装置和收集管进行排出。
附图说明
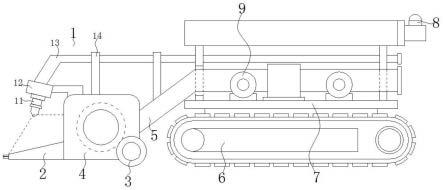
23.图1为本发明结构的正视示意图;
24.图2为本发明结构的图1的俯视图;
25.图3为本发明结构的图1的侧视图;
26.图4为本发明结构的剪切装置示意图;
27.图5为本发明结构的连接板向右移动示意图;
28.图6为本发明结构的连接板向左移动示意图;
29.图7为本发明结构的淤泥收集装置示意图。
30.图中:1、冲击装置;11、高压喷头;12、安装板;13、水管;14、固定架;2、剪切装置;
20、驱动块;21、固定剪切片;22、活动剪切片;23、连接柱;24、连接板;25、导向块;26、连动板;27、从动板;28、主动板;29、驱动电机;30、安装座;3、移动轮;4、淤泥收集装置;41、收集框;42、第一蛟龙;43、收集孔;44、第二蛟龙;45、转动电机;5、收集管;6、履带行走结构;7、机体;8、ccd摄像机;9、防倾覆装置;91、接触轮;92、支撑板;93、限位块;94、安装框;95、导向杆;96、固定板;97、驱动缸。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.具体实施方式一:请参阅图1-7,本发明提供一种技术方案:一种防止倾覆的大管径清淤机器人,包括:冲击装置1、剪切装置2和淤泥收集装置4;
33.冲击装置1安装在机体7的左上侧,且机体7的底部通过履带行走结构6进行驱动,同时机体7的左侧安装有淤泥收集装置4,并且淤泥收集装置4的左下侧安装有剪切装置2;机体7的两侧均安装有防倾覆装置9,且驱动缸97安装在机体7上,机体7的顶板上安装有ccd摄像机8;
34.剪切装置2上的安装座30内部活动安装有连接板24,且连接板24上固定设置有连接柱23,同时连接柱23远离连接板24的一端与活动剪切片22固定连接,驱动电机29通过机座安装在安装座30的内部,且安装座30的表面分别安装有多组固定剪切片21和活动剪切片22;
35.淤泥收集装置4上的收集框41内部分别安装有第一蛟龙42和第二蛟龙44,且收集框41内部开设有收集孔43,同时收集孔43内安装有收集管5,收集管5上安装有污泥泵,且污泥泵通过机座安装在机体7上,淤泥收集装置4包括收集框41、第一蛟龙42、收集孔43、第二蛟龙44和转动电机45,且转动电机45安装在收集框41的侧壁上,同时转动电机45的输出轴与第二蛟龙44的转轴固定,收集框41的底部两侧安装有移动轮3。
36.本装置通过履带行走结构6在大管径的内部进行移动,通过剪切装置2和淤泥收集装置4的设置,将污泥收集在淤泥收集装置4的内部,并同时启动污泥泵的开关,使得淤泥收集装置内部的污泥在污泥泵的作业下,通过收集管5进行排出到管道的外侧,完成对大管径内部的清淤工作,取代人工清淤的时候,省时省力,避免工作人员在管内工作的时候发生安全隐患。
37.具体实施方式二:本实施方式为具体实施方式一的进一步限定,冲击装置1包括高压喷头11、安装板12、水管13和固定架14,且安装板12上均匀安装有多组高压喷头11。
38.如图1-3所示:剪切装置2、淤泥收集装置4在管道内移动的时候,在外界的增压泵的作用下,冲击水流自安装板12的内部从高压喷头11的内部进行喷出,使得水流冲击在剪切装置2的表面,将置于剪切装置2表面坚硬的污泥进行冲散,便于进入到收集管5的内部,进行排出管道内部。
39.具体实施方式三:本实施方式为具体实施方式一的进一步限定,安装板12上安装有水管13,且水管13远离安装板12的一端与外界的水泵连通设置,同时水管13通过固定架
14安装在淤泥收集装置4上。
40.如图1所示:水管13通过固定架14安装在淤泥收集装置4上,保证水管13内有水流动的时候,水管13不会发生大幅度的振动工作。
41.具体实施方式四:本实施方式为具体实施方式三的进一步限定,高压喷头11在安装板12的底部倾斜设置,且高压喷头11上的喷嘴与剪切装置的表面相对设置。
42.如图1所示:高压喷头11上的喷嘴与剪切装置的表面相对设置,使得自高压喷头11喷出的高压水流,可直接喷射在剪切装置2表面的污泥上,可对剪切装置2表面的污泥进行冲散工作。
43.具体实施方式五:本实施方式为具体实施方式一的进一步限定,剪切装置2包括驱动块20、固定剪切片21、活动剪切片22、连接柱23、连接板24、导向块25、连动板26、从动板27、主动板28、驱动电机29和安装座30,且固定剪切片21、活动剪切片22上均开设有切断刀面,同时两组切断刀面相对设置。
44.如图1-4所示:剪切装置2在管道内部移动的时候,置于剪切装置2表面的污泥在进入到安装座30的表面之前,通过固定剪切片21、活动剪切片22对污泥进行剪切工作,对块状的污泥进行剪切,对污泥进行切断,便于通过淤泥收集装置4和收集管5进行排出。
45.具体实施方式六:本实施方式为具体实施方式五的进一步限定,连接板24的表面均匀安装有八组连接柱23,且八组连接柱23端部均安装有活动剪切片22,活动剪切片22与固定剪切片21的剖面均为直角梯形设置。
46.如图4-6所示:活动剪切片22与固定剪切片21的剖面均为直角梯形设置,活动剪切片22进行往复横向移动,对块状的污泥进行剪切工作,安装座30的底部螺接安装有用于清理其内部污泥的底盖,每次使用完毕后,将底盖拆卸下来,对安装座30内部的污泥和污水进行清理工作,安装座30内部的驱动电机29为防水电机。
47.具体实施方式七:本实施方式为具体实施方式五的进一步限定,连接板24的底部两侧均安装有导向块25,且导向块25的内部开设有导向孔,同时导向孔内部插接有导向柱,并且导向柱设置为两组分别固定设置在安装座30的内部两侧。
48.如图6所示:连接板24在安装座30的内部横向移动的时候,其底部两侧均的导向块25内部插接有导向柱,可对横向移动的连接板24进行限位和导向,避免连接板24在横向移动的时候发生倾斜。
49.具体实施方式八:本实施方式为具体实施方式七的进一步限定,连接板24的底部铰接有从动板27,且从动板27的底部与主动板28端部铰接,同时主动板28远离从动板27的一端与安装座30的内部下侧设置的固定块铰接设置。
50.如图4-6所示:活动剪切片22与固定剪切片21的工作方式为:启动驱动电机29的外接开关,驱动电机29的启动方式为远程启动,驱动电机29的输出轴带动连动板26转动,在从动板27、主动板28作用下,实现连接板24的横向移动工作,
51.具体实施方式九:本实施方式为具体实施方式五的进一步限定,驱动电机29的输出轴上安装有连动板26,且连动板26的端部与驱动块20连接在一起,同时驱动块20活动设置在主动板28内部开设的条形孔中,驱动电机29通过连动板26、主动板28和从动板27对连接板24进行横向驱动。
52.如图4-6所示:驱动块20活动设置在主动板28内部开设的条形孔中,驱动电机29通
过连动板26、主动板28和从动板27对连接板24进行横向驱动,实现对连接板24、活动剪切片22的横向移动工作。
53.具体实施方式十:本实施方式为具体实施方式一的进一步限定,防倾覆装置9包括接触轮91、支撑板92、限位块93、安装框94、导向杆95、固定板96和驱动缸97,且驱动缸97的活塞杆与固定板96固定连接,同时固定板96上安装有两组支撑板92,支撑板92端部活动设置有接触轮91,且支撑板92上安装有限位块93,且限位块93滑动设置在机体7上安装的限位轨道中,固定板96的底部两侧均安装有导向杆95,且导向杆95插接在安装框94的内部。
54.如图1-2所示:防倾覆装置9的设置,可避免本机器人在管道内部移动的时候,防倾覆装置9上的接触轮91滚动设置在管道的内壁上,可对移动时候的机器人进行限位和导向,接触轮91的位置可通过驱动缸97进行调节工作,实现对不同尺寸的管道进行适配。
55.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1