一种增程式轮式作业机的制作方法
1.本发明涉及工程机械技术领域,特别是指一种结构简单、使用方便,具有较大作业深度的增程式轮式作业机。
背景技术:
2.工程机械是我国装备工业的重要组成部分。概括地说,凡土石方施工工程、路面建设与养护、流动式起重装卸作业和各种建筑工程所需的综合性机械化施工工程所必需的机械装备,均可称之为工程机械。
3.现有的工程机械作业功能多种多样,其结构形式也各不相同,最为常见的即是挖掘机械、铲土运输机械、工程起重机械、压实机械等,其在现代工业发展过程中发挥了不可替代的作用。以最为常见的挖掘机械来说,挖掘深度和作业范围是直接决定其作业效率的关键指标,因此,现阶段亟需一种既具有较大挖掘深度,又具有较广挖掘范围的作业机械。
技术实现要素:
4.本发明提出一种增程式轮式作业机,其具有较大的挖掘深度和较广的挖掘范围,能够有效提高整机的作业效率。
5.本发明的技术方案是这样实现的:增程式轮式作业机,包括:
6.机体,所述机体上设有能够在水平面内旋转的底盘,所述底盘上固定有与其同步旋转的旋转臂,所述旋转臂向外探出;
7.增程支架,所述增程支架的一端铰接于所述旋转臂的末端,所述增程支架的另一端与旋转臂之间连接有用于驱动其在竖直面内运动的增程油缸;
8.第一大臂,所述第一大臂的一端也铰接于所述旋转臂的末端并与增程支架的铰接点重合,所述第一大臂与增程支架之间连接有用于驱动其以铰接点为中心在竖直面内运动的第一大臂油缸;
9.第二大臂,所述第二大臂的一端铰接于第一大臂的末端,第二大臂与第一大臂之间连接有用于驱动第二大臂在竖直面内运动的第二大臂油缸;
10.挖斗,所述挖斗铰接于所述第二大臂的末端,所述挖斗与第二大臂之间连接有用于驱动其动作的收斗油缸。
11.作为一种优选的实施方式,所述增程支架呈弧形结构,所述第一大臂油缸、增程支架的连接点与第一大臂旋转中心的距离大于其与增程支架、增程油缸连接点的距离。
12.作为一种优选的实施方式,所述第二大臂上铰接有弧形连杆,所述挖斗上铰接有直线连杆,所述弧形连杆、直线连杆的末端均铰接于所述收斗油缸的一端,所述收斗油缸的另一端铰接于所述第二大臂上。
13.作为一种优选的实施方式,所述第一大臂油缸、第二大臂油缸分别位于第一大臂的两侧,所述第二大臂油缸、收斗油缸分别位于第二大臂的两侧。
14.作为一种优选的实施方式,所述机体上还设有可实现180
°
前后旋转的驾驶室,所
述驾驶室位于底盘的一侧,所述底盘能够带动旋转臂在水平面内进行270
°
旋转。
15.作为一种优选的实施方式,所述机体的后端还悬挂有后支撑,所述后支撑用于支撑地面或安装属具;
16.所述后支撑处还设有一根连接变矩器、用于输出动力的输出轴,所述输出轴用于与后支撑上的属具连接。
17.采用了上述技术方案后,本发明的有益效果是:本发明的增程式轮式作业机利用底盘带动旋转臂在水平面内进行旋转,进而同步带动旋转臂上安装的其他一系列部件进行旋转,从而实现了较大范围内的作业,且相比于一般的挖掘机械来说,本发明的关键特点是增加了一个增程支架,在第一大臂、第二大臂带动挖斗运动到极限挖掘深度时,操作人员还可以继续操作增程油缸,利用增程油缸和增程支架的共同作用再进一步加大挖斗的挖掘深度,从而有效提高了整机的作业效率。因此,本发明的作业机相对于现有技术的机械来说,不仅提高了挖掘的深度,而且增大了作业的范围,具有很好的实用性。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
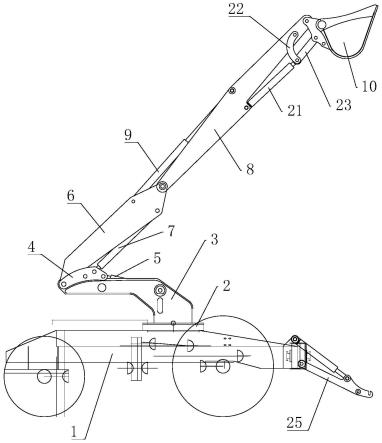
19.图1为本发明一种实施例的状态一示意图;
20.图2为状态二示意图;
21.图3为状态三示意图;
22.图4为该实施例的俯视示意图;
23.图中:1-机体;2-底盘;3-旋转臂;4-增程支架;5-增程油缸;6-第一大臂;7-第一大臂油缸;8-第二大臂;9-第二大臂油缸;10-挖斗;11-第一铰接点;12-第二铰接点;13-第三铰接点;14-第四铰接点;15-第五铰接点;16-第六铰接点;17-第七铰接点;18-第八铰接点;19-第九铰接点;20-第十铰接点;21-收斗油缸;22-弧形连杆;23-直线连杆;24-驾驶室;25-后支撑;26-变矩器;27-输出轴。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.如图1、图2和图3共同所示,为本发明增程式轮式作业机的三种不同的状态示意图,该实施例首先包括一个机体1,该机体1采用轮式结构的四轮驱动形式,不仅制作成本较低,而且油耗低,机动性强,可适用于公路等复杂路况和工作环境,对地面的损伤也较小。
26.在机体1上设置有一个可在水平面内旋转的底盘2,同时在底盘2的一侧还设有驾驶室24,底盘2在水平面内的旋转角度控制在270
°
,能够最大限度的扩大作业范围,驾驶室24能够实现180
°
的前后旋转,驾驶室24内部的座椅和方向盘也能够同步旋转180
°
,进而方
便驾驶员的操作。
27.在底盘2上固定有与其同步旋转的旋转臂3,该旋转臂3大致呈“l”形结构并向外探出。旋转臂3的末端铰接有一根弧形结构的增程支架4,增程支架4的一端通过第四铰接点14铰接连接在旋转臂3的末端,同时增程支架4的另一端还通过第二铰接点12铰接连接有增程油缸5,增程油缸5的末端通过第一铰接点11铰接连接在旋转臂3上,通过此种结构,即可利用增程油缸5的伸缩来控制增程支架4以第四铰接点14为中心进行旋转。
28.在第四铰接点14处还铰接连接有第一大臂6,也即增程支架4和第一大臂6的旋转中心是相同的,该第一大臂6的前端通过第五铰接点15铰接连接有第一大臂油缸7,该第一大臂油缸7的另一端通过第三铰接点13铰接连接在增程支架4上,因此,第一大臂6在竖直面内的运动幅度可以通过增程油缸5和第一大臂油缸7来实现控制,进一步增大其作业的深度。而现有技术中,通常仅通过一根第一大臂油缸7来控制,该实施例在具体操作时,首先利用第一大臂油缸7来控制第一大臂6的动作幅度,在其不满足工作要求的情况下,再利用增程油缸5来辅助控制。这也是本发明专利区别于现有技术最大的区别点,有了增程油缸5和增程支架4的辅助,本发明专利的作业深度可达3米以上,相对于现有技术来说取得了巨大的进步。而且第一大臂油缸7、增程支架4的连接点与第一大臂6旋转中心的距离大于其与增程支架4、增程油缸5连接点的距离,也即第三铰接点13、第四铰接点14的距离要大于第三铰接点13、第二铰接点12的距离,这种结构能够使得增程油缸5伸缩较小的一段距离,即可控制第一大臂6较大幅度的动作。
29.在第一大臂6的前端还通过第六铰接点16铰接连接有第二大臂8,该第二大臂8的中间部位通过第八铰接点18铰接连接有第二大臂油缸9,第二大臂油缸9的另一端通过第七铰接点17铰接连接于第一大臂6上,且第一大臂油缸7和第二大臂油缸9分别位于第一大臂6的两侧。通过第二大臂油缸9的伸缩即可控制第二大臂8的动作。
30.在第二大臂8的前端还通过第十铰接点20铰接连接有挖斗10,挖斗10与第二大臂8之间还连接有用于控制其动作的机构,该机构具体包括收斗油缸21、弧形连杆22、直线连杆23,其中,收斗油缸21的一端通过第九铰接点19铰接连接在第二大臂8的中间部位,收斗油缸21的另一端同时与弧形连杆22、直线连杆23的一端铰接连接,弧形连杆22的另一端铰接连接在第二大臂8上,直线连杆23的另一端铰接连接在挖斗10上,而且第二大臂油缸9和收斗油缸21分别位于第二大臂8的两侧,通过这种结构,即可实现挖斗10的相应动作。
31.最后,在机体1的后端还悬挂有后支撑25,该后支撑25采用三点式悬挂结构,其主要作用是在整机进行挖掘作业时支撑在地面上,起到稳固车身、避免晃动的作用。此外,该实施例还可在后支撑25上安装其他的属具(例如翻土机构、播种机构等等),然后将该属具连接于后支撑25处设置的一根输出轴27上,该输出轴27连接在前端的变矩器26上,能够将动力从变矩器26经输出轴27传递至属具上进行相应的作业,进而增加该机整体的功能多样性。
32.整体来说,本发明的增程式轮式作业机结构简单、使用方便,通过相应的结构能够加大挖掘的作业范围和深度,最大作业半径可达7米,最大挖掘深度可达3.2米,相对于现有技术来说取得了巨大进步,具有很好的实用性。
33.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1