自动清淤装置和清淤设备的制作方法
1.本发明涉及清淤技术领域,具体而言,涉及一种自动清淤装置和清淤设备。
背景技术:
2.抽吸类设备在市政管网维护、危险灾害救援等领域具有广泛应用,利用气流输送及负压抽吸原理可将固体颗粒、固液混合物以及流体抽吸至转运罐体内。
3.目前抽吸类设备尤其是联合疏通车、吸污车等抽吸作业车在作业过程中作业方式较为传统,主要依靠人工把持抽吸管进行作业,该方式极度依赖作业人员操作熟练度,而且作业劳动强度大,作业效率低。抽吸类设备关键技术为利用气流流速将被抽吸物快速吸入,气流流速影响物料初始悬浮速度、物料在管道内输送速度。人工控制抽吸管难度大,无法始终保持最佳作业距离,导致抽吸效率降低。板结物难以抽吸,需提前使用相应破松装置,破松装置主要包括高压气破松或高压水破松,导致作业装置增多。此外,针对特殊工作场合,如涵洞等,内部空间小,可能存在有害气体,作业人员无法进入,多使用一种外接电缆或液压软管清淤设备,电缆等卷盘装置增加,操作不便。
4.当前抽吸设备抽吸端部并无标准配套工具辅助作业,主要依靠人工控制抽吸管,按照作业班次进行人员轮换。作业人员为降低劳动强度、提高抽吸效率,会使用现场工具如独轮推车、扶手等辅助工具控制抽吸管的移动和姿态调整。针对板结物抽吸,当前主要使用空压机产生高压气体进行破松,或利用高压水破松。针对危险工况当前主要技术方案为首先利用探测装置进行勘探,检测至低风险状态后,方可预警人员作业。针对狭小空间的污物清理,当前存在外接动力清淤设备,其行驶及作业动力需要外接电缆或液压软管,操作不便。涉及长距离清淤时外接管路较长,质量较重,影响作业。
技术实现要素:
5.本发明旨在提供一种自动清淤装置和清淤设备,以改善现有技术中存在的人工把持抽吸管进行作业导致的劳动强度大的问题。
6.根据本发明实施例的一个方面,本发明提供了一种自动清淤装置,在一些实施例中,用于拖拽清淤设备的抽吸管移动,自动清淤装置包括:
7.行走底盘;以及
8.工作臂组件,包括与行走底盘连接的工作臂本体和安装在工作臂本体上且用于连接清淤设备的抽吸管的抽吸口部件,抽吸口部件被配置成可相对于工作臂本体在水平面内摆动。
9.在一些实施例中,工作臂组件被配置成相对于行走底盘可俯仰摆动。
10.在一些实施例中,自动清淤装置还包括驱动工作臂组件相对于行走底盘俯仰摆动的第一液压缸,第一液压缸的一端与行走底盘连接,第一液压缸的另一端与工作臂本体连接。
11.在一些实施例中,工作臂组件还包括驱动抽吸口部件相对于工作臂本体在水平面
内摆动的第二液压缸,第二液压缸的一端与工作臂本体连接,第二液压缸的另一端与抽吸口部件连接。
12.在一些实施例中,自动清淤装置还包括设在抽吸口部件的远离工作臂本体的一端的集料部件,集料部件包括壳体、位于壳体的远离抽吸口部件的一端的进口端和位于壳体的临近抽吸口部件的一端的出口端,出口端与抽吸口部件连通,壳体的内径沿靠近出口端的方向渐缩。
13.在一些实施例中,集料部件包括铲斗。
14.在一些实施例中,自动清淤装置还包括用于破松板结的淤泥的破松部,破松部安装在抽吸口部件的远离工作臂本体的一侧。
15.在一些实施例中,破松部的高度可调。
16.在一些实施例中,自动清淤装置还包括用于驱动破松部调节高度的第三液压缸,第三液压缸的一端与破松部连接,另一端与抽吸口部件连接。
17.在一些实施例中,破松部包括转轴和安装在转轴上的破松齿。
18.在一些实施例中,自动清淤装置还包括:
19.动力系统,用于驱动行走底盘行走,动力系统包括驱动部件;以及
20.液压系统,包括与驱动部件传动连接的液压泵。
21.在一些实施例中,驱动部件包括燃油发动机或电机。
22.在一些实施例中,
23.驱动部件与行走底盘传动连接,以驱动行走底盘行走;或
24.液压系统还包括与液压泵流体连接的第一液压马达,第一液压马达与行走底盘传动连接,以驱动行走底盘行走。
25.在一些实施例中,
26.液压泵与驱动工作臂组件相对于行走底盘俯仰摆动的第一液压缸流体连接;或
27.液压泵与驱动抽吸口部件相对于工作臂本体在水平面内摆动的第二液压缸流体连接;或
28.液压泵与驱动破松板结的淤泥的破松部调节高度的第三液压缸流体连接;
29.液压泵与驱动破松板结的淤泥的破松部的转轴转动的第二液压马达流体连接。
30.在一些实施例中,行走底盘包括履带。
31.根据本发明的另一方面,还提供了一种清淤设备,清淤设备,包括:
32.抽吸泵;以及
33.上述的自动清淤装置,抽吸泵与抽吸口部件通过抽吸管连接。
34.应用本技术的技术方案,抽吸口部件可随行走底盘移动并可相对于行走底盘摆动,且抽吸口部件与清淤设备的抽吸管连接,以改变抽吸管的抽吸位置,改善了现有技术中存在的人工把持抽吸管进行作业导致的劳动强度大的问题。
35.通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
附图说明
36.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现
有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
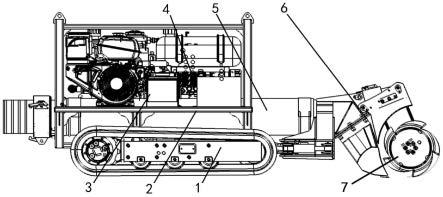
37.图1示出了本发明的实施例的自动清淤装置的结构示意图;
38.图2示出了本发明的实施例的自动清淤装置的行走底盘的结构示意图;以及
39.图3示出了本发明的实施例的自动清淤装置的俯视结构示意图。
40.图中:1、行走底盘;11、梁;12、履带;13、减速机;14、支重轮;15、导向轮;16、张紧机构;17、驱动轮;2、车架;3、动力系统;31、驱动部件;32、联轴器;33、传动连接部件;34、油箱;4、液压系统;41、液压泵;42、液压流体箱;43、控制阀组;5、工作臂组件;51、管路;52、第二液压缸;53、工作臂本体;54、抽吸口部件;6、集料部件;7、破松部;71、转轴;72、破松齿;8、第一液压缸;9、第三液压缸。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.结合图1至3所示,本实施例的自动清淤装置用于拖拽清淤设备的抽吸管移动以改变抽吸位置,自动清淤装置包括行走底盘1以及工作臂组件5。工作臂组件5包括与行走底盘1连接的工作臂本体53和安装在工作臂本体53上且用于连接清淤设备的抽吸管的抽吸口部件54,抽吸口部件54被配置成可相对于工作臂本体53在水平面内摆动。
43.本实施例中,抽吸口部件54可随行走底盘1移动并可相对于行走底盘1摆动,且抽吸口部件54与清淤设备的抽吸管连接,以改变抽吸管的抽吸位置,改善了现有技术中存在的人工把持抽吸管进行作业导致的劳动强度大的问题。
44.本实施例的自动清淤装置是一种清淤设备的抽吸管的位置调整装置,抽吸口部件54用于与清淤设备的抽吸泵通过抽吸管连接。在进行抽吸作业时,清淤设备位于清淤场地外,抽吸管由清淤设备的抽吸泵延伸至待抽吸作业的场地,自动清淤装置位于待抽吸作业的场地内,自动清淤装置用于调整抽吸管的抽吸位置和角度。
45.在本实施例中,工作臂组件5还包括沿工作臂本体53延伸并与抽吸口部件54连接的管路51,管路51与清淤设备的抽吸管连接。
46.在一些实施例中,工作臂组件5被配置成相对于行走底盘1可俯仰摆动,以调整抽吸位置。
47.在一些实施例中,自动清淤装置还包括驱动工作臂组件5相对于行走底盘1俯仰摆动的第一液压缸8,第一液压缸8的一端与行走底盘1连接,第一液压缸8的另一端与工作臂本体53连接。
48.在一些实施例中,工作臂组件5还包括驱动抽吸口部件54相对于工作臂本体53在水平面内摆动的第二液压缸52,第二液压缸52的一端与工作臂本体53连接,第二液压缸52的另一端与抽吸口部件54连接。
49.在一些实施例中,自动清淤装置还包括设在抽吸口部件54的远离工作臂本体53的一端的集料部件6,集料部件6包括壳体、位于壳体的远离抽吸口部件54的一端的进口端和位于壳体的临近抽吸口部件54的一端的出口端,出口端与抽吸口部件54连通,壳体的内径沿靠近出口端的方向渐缩。
50.在一些实施例中,集料部件6包括铲斗,铲斗既可以铲起淤泥又可将淤泥朝抽吸口部件54引导。
51.在一些实施例中,集料部件6与抽吸口部件54连接,以随抽吸口部件54左右摆动和俯仰摆动。
52.自动清淤装置还包括用于破松板结的淤泥的破松部7,破松部7安装在抽吸口部件54的远离工作臂本体53的一侧。
53.在一些实施例中,破松部7的高度可调,以调整与地面间隙,便于抽吸不同粒径物料。
54.在一些实施例中,破松部7与抽吸口部件54连接,以随抽吸口部件54左右摆动和俯仰摆动。
55.自动清淤装置还包括用于驱动破松部7调节高度的第三液压缸9,第三液压缸9的一端与破松部7连接,另一端与抽吸口部件54连接。
56.破松部7包括转轴71和安装在转轴71上的破松齿72。转轴71被配置成可正反向旋转,将堵塞物料排出。
57.在一些实施例中,破松部7还包括喷射高压液体的喷嘴。
58.本实施例中,破松部7安装在集料部件6的进口端,破松部7将板结的淤泥破松后,淤泥在集料部件6的引导下朝抽吸口部件54流动。
59.自动清淤装置还包括动力系统3和液压系统4。动力系统3用于驱动行走底盘1行走,动力系统3包括驱动部件31。液压系统4包括与驱动部件31传动连接的液压泵41。
60.驱动部件31包括燃油发动机或电机。
61.在一些实施例中,驱动部件31与行走底盘1传动连接,以驱动行走底盘1行走。
62.在另一实施例中,液压系统4还包括与液压泵41流体连接的第一液压马达,第一液压马达与行走底盘1传动连接,以驱动行走底盘1行走。
63.液压泵41与驱动工作臂组件5相对于行走底盘1俯仰摆动的第一液压缸8流体连接。液压泵41与驱动抽吸口部件54相对于工作臂本体53在水平面内摆动的第二液压缸52流体连接。液压泵41与驱动破松板结的淤泥的破松部7调节高度的第三液压缸9流体连接。
64.在本实施例中,液压泵41与驱动破松板结的淤泥的破松部7的转轴71转动的第二液压马达流体连接。
65.液压系统还包括盛放液压流体的液压流体箱42,液压泵41的进口与液压流体箱42连通。液压系统还包括控制阀组43。控制阀组43包括用于控制第一液压缸8动作的第一液压阀、控制第二液压缸52动作的第二液压阀、用于控制第三液压缸9动作的第三控制阀、用于控制第一液压马达的第四控制阀和用于控制第二液压马达的第五控制阀中的一个或多个。
66.如图2所示,本实施例中,行走底盘1包括履带12。行走底盘1还包括与驱动部件31传动连接的驱动轮17、用于承载驱动轮17的机架、连接在两个机架之间的梁11、安装在机架上支重轮14、安装在机架上的张紧机构16以及与张紧机构16连接的导向轮15。履带12套设
在驱动轮17、支重轮14和导向轮15上。张紧机构16驱动导向轮15顶压履带12以使履带张紧。
67.自动清淤装置还包括车架2,车架2安装在行走底盘1的横梁11上。车架2依靠u型螺栓进行纵向限位,利用推板横向限位,防止车架2相对行走底盘1发生位移。
68.其中,动力系统3的驱动部件31安装在车架2上,动力系统3还包括与驱动部件31连接的联轴器32,联轴器32与液压泵41连接。动力系统3还包括传动连接部件33,传动连接部件33的一端与联轴器32连接,传动连接部件33的另一端与液压泵41连接。
69.油箱34通过燃油管及三通与原装油箱出油口并联,合流后进入发动机化油器。动力系统设计远程控制系统,可控制驱动部件31启停及转速。
70.行走底盘1还包括安装在机架上的减速机13,减速机13与驱动轮17传动连接。在一些实施例中,减速机13与上述的第一液压马达传动连接。在另一些实施例中,减速机13与驱动部件31传动连接。
71.在本实施例中,抽吸口部件54可相对于工作臂本体53左右摆动,且抽吸口部件54可随工作臂本体53俯仰摆动。控制阀组43通过控制第一液压缸8和第二液压缸52控制抽吸口部件54左右摆动和上校移动。
72.具体操作过程为:
73.启动驱动部件31(发动机),并调整至额定转速(手动调节或电动调节)。控制主机行驶至作业目的地,若作业场地为要求清淤机垂直下放,可直接吊装车架2上吊装点放置至作业目的地。根据现场工况需求,调整抽吸工作臂组件5举升角度、抽吸口部件54摆动角度,定位与抽吸物间距,然后开始进行抽吸作业。作业过程中可观察实时传输画面不断调整抽吸工作臂组件5与抽吸口部件54姿态。作业过程中如遇板结物体或黏附物等,可打开破松部7,并设置旋转速度或打开喷嘴总成辅助抽吸作业。
74.根据本发明的另一方面,还提供了一种清淤设备,包括抽吸泵和上述的自动清淤装置,抽吸泵与抽吸口部件54通过抽吸管连接。
75.以上仅为本发明的示例性实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1