一种挖掘机动臂浮动液压控制系统及控制方法与流程
1.本发明涉及工程机械技术领域,特别是一种挖掘机动臂浮动液压控制系统及控制方法。
背景技术:
2.挖掘机作为应用最广泛的工程机械产品,其动臂、斗杆、铲斗相互铰接组成工作装置,通过动臂油缸、斗杆油缸、铲斗油缸带动工作装置实现挖掘动作,再加上回转和行走动作,动作灵活多样,适用于各种复杂工况和功能需求。挖掘机在平地作业时,需要不断地准确调整动臂动作速度和角度来配合斗杆动作,保证铲斗施加于地面的力相对恒定,才能达到良好的平地效果。另外,挖掘机在破碎作业时,破碎锤对岩石等物体破碎的瞬间,动臂会受到向上的反作用力,这需要操作人员不停调整、精确控制动臂下压的力,来保证挖掘机整车的稳定性。这些多动作复合操作,需要操作人员具备较高的技能与丰富经验,也容易让人产生疲劳。而动臂浮动功能则能减少动臂操作次数和降低对人员的操作技能要求,尤其在平地作业中,可有效降低操作难度和强度。
3.目前中大吨位主流挖掘机的动臂控制阀都是三位换向阀,不具备动臂浮动功能。为实现动臂浮动功能,一些厂商在三位换向阀基础上增加一位浮动位,升级为四位换向阀,这需要专门开发新的主阀阀芯和阀体,还要匹配与浮动功能相适应的先导阀,且对现有液压系统的改动较大,开发和调试难度大,需要投入大量的资金、时间。
技术实现要素:
4.本发明的目的是提供一种挖掘机动臂浮动液压控制系统及控制方法,在不改变现有液压系统主要配置的前提下,实现动臂浮动功能,降低挖掘机的操作难度和强度。本发明采用的技术方案如下。
5.一方面,本发明提供一种挖掘机动臂浮动液压控制系统,包括动臂油缸、液压回路和控制器;所述液压回路包括主油路和先导油路,所述主油路上设有主泵和动臂换向阀,所述主泵经所述动臂换向阀向所述动臂油缸供油,所述动臂换向阀的两工作油口分别连通至所述动臂油缸的有杆腔和无杆腔;所述动臂油缸的有杆腔与所述动臂换向阀连接的油路上连接有有杆腔浮动阀,所述动臂油缸的无杆腔与所述动臂换向阀连接的油路上连接有无杆腔浮动阀,所述动臂油缸的有杆腔和无杆腔分别通过所述有杆腔浮动阀和无杆腔浮动阀连接至油箱;所述控制器连接所述有杆腔浮动阀和无杆腔浮动阀的控制端;所述先导油路上设有先导油泵和手柄先导阀,所述手柄先导阀的进油口连接先导油泵,两先导油口分别连接所述动臂换向阀的两换向控制口。
6.本发明在应用时,升降操作手柄通过手柄先导阀控制动臂换向阀执行换向动作,使得动臂油缸按照操作手柄动作对应的动作模式伸缩,完成动臂的升降。在动臂升降过程中,控制器控制浮动阀组的导通或关闭,实现动臂油缸有杆腔或无杆腔在动臂上升模式中
或动臂下降模式中与液压油箱导通,实现上升浮动或下降浮动。
7.可选的,所述有杆腔浮动阀和无杆腔浮动阀采用电磁阀或液控阀,有杆腔浮动阀的流道一端连通至油箱,另一端连通动臂油缸有杆腔与动臂换向阀之间的主油路,无杆腔浮动阀的流道一端连通至油箱,另一端连通动臂油缸无杆腔与动臂换向阀之间的主油路;所述控制器控制所述有杆腔浮动阀和无杆腔浮动阀的导通或关闭。所述有杆腔浮动阀和无杆腔浮动阀可优选为采用二位二通电磁阀,控制器输出电信号用于控制其阀芯位置,当阀芯在下,阀门关断,阀芯在上时阀门导通。
8.可选的,所述有杆腔浮动阀的流道一端通过一可调节流阀连通至油箱。通过调节节流口的大小,可人为控制浮动状态下动臂油缸有杆腔的背压。
9.可选的,所述手柄先导阀对应动臂下降的先导油口连接动臂换向阀换向控制口的先导油路上,还连接有浮动先导电磁阀;所述控制器用于控制所述浮动先导电磁阀导通所在的先导油路,或者截断所在的先导油路。
10.可选的,所述浮动先导电磁阀采用二位三通电磁阀,其主进油口p3连接手柄先导阀对应动臂下降的先导油口,回油口t3连通至油箱,先导油口a3连接动臂换向阀的换向控制口x2;浮动先导电磁阀的导通状态包括:a3口与p3口连通,a3口与t3口连通。
11.可选的,所述手柄先导阀的两先导油口上分别连接有压力传感器,压力传感器的信号输出端连接控制器。
12.以上技术方案中,当手柄先导阀对应动臂下降的先导油口与动臂换向阀的x2口之间先导油路被截断,则动臂下降无法再直接通过手柄控制操作。
13.可选的,挖掘机动臂浮动液压控制系统还包括模式设定单元,所述模式设定单元包括浮动模式开关和破碎模式开关;动臂工作模式包括常规模式、上升浮动模式、下降浮动模式和双向浮动模式;在常规模式下,所述浮动模式开关和破碎模式开关均为关闭状态,控制器控制手柄先导阀与动臂换向阀之间的两先导油路导通,动臂油缸由操纵手柄通过手柄先导阀和动臂换向阀控制动作;在控制动臂上升时,若所述浮动模式开关为开启状态,则控制器控制有杆腔浮动阀导通,使动臂处于上升浮动模式;在控制动臂下降时,若所述浮动模式开关及破碎模式开关均为开启状态,当操纵手柄动作使得所述手柄先导阀对应动臂下降的先导油口与动臂换向阀的换向控制口导通,且先导油路压力大于预设值,则控制器控制所述无杆腔浮动阀导通,并控制所述浮动先导电磁阀切断所在的先导油路,使得动臂处于下降浮动模式;若所述浮动模式开关为开启状态,破碎模式开关为关闭状态,且控制动臂下降的操纵手柄推到底,手柄先导阀对应动臂下降的先导油口所连的先导油路压力大于预设值,则控制器控制有杆腔浮动阀和无杆腔浮动阀导通,并控制浮动先导电磁阀截断所在的先导油路,使得动臂处于双向浮动模式。
14.可选的,所述模式设定单元还包括设置于操纵手柄上的浮动取消按钮;若所述浮动取消按钮被按下,则控制器控制所述有杆腔浮动阀和无杆腔浮动阀关闭。可实现上升浮动、下降浮动或双向浮动模式中的暂时浮动取消。
15.第二方面,本发明提供一种第一方面所述挖掘机动臂浮动液压控制系统的控制方
法,包括:获取浮动模式开启状态信息和破碎模式开启状态信息,以及手柄先导阀两先导油口上的压力信息;若浮动模式和破碎模式均为未开启状态,则判断目标动臂运行模式为常规模式,控制手柄先导阀与动臂换向阀之间的两先导油路导通,有杆腔浮动阀和无杆腔浮动阀为关闭状态;动臂油缸由操纵手柄通过手柄先导阀和动臂换向阀控制动作;若浮动模式为开启状态,破碎模式为未开启状态,当对应动臂提升的操纵手柄动作,则判断目标动臂运行模式为上升浮动模式,控制有杆腔浮动阀导通,使得动臂处于上升浮动模式;若浮动模式及破碎模式均为开启状态,当控制动臂下降的操纵手柄动作使得手柄先导阀对应动臂下降的先导油口与动臂换向阀的换向控制口导通,且该先导油路压力大于预设值,则判断目标动臂运行模式为下降浮动模式,控制无杆腔浮动阀导通,并控制浮动先导电磁阀切断所在的先导油路,使得动臂处于下降浮动模式;若浮动模式为开启状态,破碎模式为未开启状态,当控制动臂下降的操纵手柄推到底,手柄先导阀对应动臂下降的先导油口所连的先导油路压力大于预设值,则判断目标动臂运行模式为双向浮动模式,控制有杆腔浮动阀和无杆腔浮动阀导通,并控制浮动先导电磁阀截断所在的先导油路。
16.可选的,控制方法还包括:当设置于操纵手柄上的浮动取消按钮被按下时,接收浮动取消信号;响应于接收到所述浮动取消信号,控制有杆腔浮动阀和无杆腔浮动阀均关闭。
17.以上技术方案中,所述浮动模式开启状态信息、破碎模式开启状态信息、浮动暂时取消信息根据相应开关被按下或释放时发出的信号来获取。
18.有益效果与现有技术相比,本发明具有以下优点和进步:(1)通过设置浮动阀组连接在动臂油缸有杆腔和无杆腔主油路与油箱之间,无需对现有成熟的挖掘机液压元件进行升级,即可实现挖机动臂浮动功能,能够适用于挖机的远端平地工况、破碎工况、平地工况等:远端平地工况下,斗杆与地面角度小于90
°
,远端内收平地时,只需要操作斗杆内收一个动作;远端外摆平地时,斗杆外摆动作加上动臂下降手柄直接推到底,不需要调整动臂动作,就能保证铲斗施加于地面的力相对恒定,既达到良好的平地效果,又降低操作难度和工作强度;破碎工况下,浮动阀组作用结合挖掘机工作装置自身重力,能让破碎锤钎杆对岩石等物体的力相对恒定,无需精确控制动臂下压的力的大小,降低了操作难度和工作强度;平地工况下,只需控制动臂下降的操纵手柄直接推到底,无需不停调整动臂来配合斗杆动作,就能实现良好的平地效果,降低了操作难度和工作强度,同时通过调节浮动电磁阀组的可调节流口,能实现不同硬度地面的平整作业;在进行平地、夯实等作业时,工作装置自身重量满足不了所需向下的力时,可通过手柄按钮暂时取消浮动功能,采用常规模式工作,提升了挖掘机的作业效率和增适应性;(2)浮动模式只需要单独操作驾驶室内一个两位的开关,动臂下降浮动模式和动
臂双向浮动模式,可根据操作者实际操作动作,自主切换;(3)本发明的液压控制系统增加的元件少、系统架构简单、控制逻辑清晰,在现有挖掘机动臂液压系统基础上改动小,功能容易实现;(4)本发明中的浮动阀组结构简单、技术难度低、通用性好;(5)动臂下降浮动和双向浮动模式实现过程,必须需要操作动臂下降手柄,可保障挖掘机的运行安全性。
附图说明
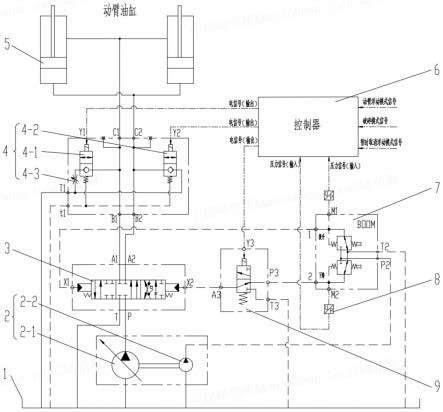
19.图1所示为本发明液压控制系统的一种实施例的常规模式液压控制系统原理示意图;图2所示为图1实施例的动臂上升浮动模式液压控制系统原理示意图;图3所示为图1实施例的动臂下降浮动模式液压控制系统原理示意图;图4所示为图1实施例的动臂双向浮动模式液压控制系统原理示意图;图1-图4中,1-油箱,2-油泵,2-1主油泵,2-2先导油泵,3-动臂换向阀,4-浮动阀组,4-1有杆腔浮动阀,4-2无杆腔浮动阀,4-3可调节流阀,5-动臂油缸,6-控制器,7-手柄先导阀,8-压力传感器,9-浮动先导电磁阀。
具体实施方式
20.以下结合附图和具体实施例进一步描述。
21.本发明的主要技术构思为:在不改变现有液压系统主要配置的前提下,通过外加浮动阀组等相关元件,并结合控制逻辑改进,实现动臂浮动功能。除浮动阀组外,其它相关元件可包括浮动先导电磁阀、压力传感器、电气开关等。
22.实施例1本实施例介绍一种挖掘机动臂浮动液压控制系统,参考图1至图4,系统包括动臂油缸5、液压回路和控制器6;所述液压回路包括主油路和先导油路,所述主油路上设有主泵2-1和动臂换向阀3,所述主泵2-1经所述动臂换向阀3向所述动臂油缸5供油,所述动臂换向阀3的两工作油口a1、a2分别连通至所述动臂油缸5的有杆腔和无杆腔;所述动臂油缸5的有杆腔和无杆腔连接所述动臂换向阀的油路上,分别连接有有杆腔浮动阀4-1和无杆腔浮动阀4-2,以分别通过所述有杆腔浮动阀4-1和无杆腔浮动阀4-2连接至油箱1;所述控制器6连接所述有杆腔浮动阀4-1和无杆腔浮动阀4-2的控制端;所述先导油路上设有先导油泵2-2和手柄先导阀7,所述手柄先导阀7的进油口连接先导油泵2-2,手柄先导阀7的两先导油口1(m1)、2(m2)分别连接所述动臂换向阀3的两换向控制口x1、x2。
23.上述有杆腔浮动阀4-1和无杆腔浮动阀4-2构成浮动阀组4。在应用时,升降操作手柄通过手柄先导阀7控制动臂换向阀3执行换向动作,使得动臂油缸5按照操作手柄动作对应的动作模式伸缩,完成动臂的升降。在动臂升降过程中,控制器6控制浮动阀组4的导通或关闭,实现动臂油缸5的有杆腔或无杆腔在动臂上升模式中或动臂下降模式中与液压油箱1导通,实现上升浮动或下降浮动。
24.本实施例中,有杆腔浮动阀4-1和无杆腔浮动阀4-2分别采用二位二通电磁阀,有
杆腔浮动阀4-1的流道一端连通至油箱1,另一端连通动臂油缸有杆腔与动臂换向阀工作口a1之间的主油路;无杆腔浮动阀4-2的流道一端连通至油箱1,另一端连通动臂油缸无杆腔与动臂换向阀工作口a2之间的主油路,控制器6通过向有杆腔浮动阀4-1的y1口和无杆腔浮动阀4-2的y2口发送控制信号,来分别控制有杆腔浮动阀4-1和无杆腔浮动阀4-2的导通或关闭,当阀芯在下时关闭,阀芯在上时导通。此外,浮动阀组4若改成液控的浮动阀组,外加先导电磁阀也能实现相同功能。
25.有杆腔浮动阀4-1的流道连通油箱1的一端,通过一可调节流阀4-3连通至油箱1,通过调节节流口的大小,可人为控制浮动状态下动臂油缸有杆腔的背压。
26.为提升动臂下降模式的安全性,本实施例中,手柄先导阀7对应动臂下降的先导油口2(m2)与动臂换向阀3的换向控制口x2相连的先导油路上还连接有浮动先导电磁阀9;浮动先导电磁阀9采用二位三通电磁阀,其主进油口p3连接手柄先导阀7对应动臂下降的先导油口2(m2),回油口t3连通至油箱1,先导油口a3连接动臂换向阀3的换向控制口x2;浮动先导电磁阀9的导通状态包括:a3口与p3口连通,a3口与t3口连通。当a3口与t3口连通,手柄先导阀7对应动臂下降的先导油口2与动臂换向阀3的x2口之间先导油路被截断,则动臂下降无法再直接通过手柄控制操作。控制器6通过向浮动先导电磁阀9的y3口传输控制信号,控制浮动先导电磁阀9导通所在的先导油路,或者截断所在的先导油路。
27.手柄先导阀7的两先导油口1(m1)、2(m2)上分别连接有压力传感器8,压力传感器8的信号输出端连接控制器。由此,在浮动模式开启的情况下,如动臂下降浮动模式或双向浮动模式判断时,控制器6可根据手柄先导阀7的2(m 2)口上的压力信号分辨操纵手柄位置是否推到底,从而适时控制有杆腔浮动阀4-1、无杆腔浮动阀4-2、浮动先导电磁阀9的导通,实现动臂下降浮动或双向浮动。
28.本实施例的挖掘机动臂浮动液压控制系统还包括模式设定单元,所述模式设定单元包括浮动模式开关、破碎模式开关以及设置于操纵手柄上的浮动取消按钮;动臂工作模式包括常规模式、上升浮动模式、下降浮动模式和双向浮动模式;参考图1,在常规模式下,浮动模式开关和破碎模式开关均为关闭状态,控制器6未收到浮动模式开启信号,则不输出浮动模式相关的电信号,有杆腔浮动阀4-1、无杆腔浮动阀4-2和浮动先导电磁阀9的阀芯均处于下位,手柄先导阀7与动臂换向阀3之间的两先导油路导通,动臂油缸5由操纵手柄通过手柄先导阀7和动臂换向阀3控制动作;参考图2,在控制动臂上升时,若浮动模式开关为开启状态,控制器6控制有杆腔浮动阀4-1导通,则动臂处于上升浮动状态;参考图3,在控制动臂下降时,若浮动模式开关及破碎模式开关均为开启状态,当操纵手柄动作使得所述手柄先导阀7对应动臂下降的先导油口2(m2)与进油口p2口和动臂换向阀3的换向控制口x2导通,控制器6可通过m2口的压力传感器8获取该先导油路上的压力,当该先导油路压力大于预设值,则控制器6控制输出电信号y2和y3,控制动臂无杆腔浮动阀4-2和浮动先导电磁阀9同时换向,此时无杆腔浮动阀4-2导通,动臂油缸5的无杆腔与液压油箱连通,浮动先导电磁阀9切断所在的先导油路,动臂处于下降浮动状态;参考图4,若浮动模式开关为开启状态,破碎模式开关为关闭状态,且控制动臂下降的操纵手柄推到底,控制器6接收到手柄先导阀7对应动臂下降的先导油口2(m2)所连的先导油路压力大于预设值,则控制器6输出电信号y1、y2、y3控制动臂有杆腔浮动阀4-1、动
臂无杆腔浮动阀4-2和浮动先导电磁阀9同时换向,有杆腔浮动阀4-1和无杆腔浮动阀4-2分别导通并连通液压油箱1,浮动先导电磁阀9截断所在的先导油路,此时动臂处于双向浮动状态;若操纵手柄上的浮动取消按钮被按下,则控制器6将接收到相应的浮动暂时取消信号,此时控制有杆腔浮动阀4-1和无杆腔浮动阀4-2暂时关闭,使得挖机动臂恢复常规状态,可实现上升浮动、下降浮动或双向浮动模式中的暂时浮动取消,当操纵手柄上的浮动取消按钮被释放,控制6恢复浮动取消前的控制状态,以使得动臂恢复前一工作模式。
29.上述的动臂上升浮动模式尤其适用于挖机远端平地工况,即斗杆与地面角度小于90
°
工况。远端内收平地时,只需要操作斗杆内收一个动作;远端外摆平地时,斗杆外摆动作加上动臂下降手柄直接推到底,不需要调整动臂动作,就能保证铲斗施加于地面的力相对恒定,既达到良好的平地效果,又降低了操作难度和工作强度。
30.动臂下降浮动模式适用于破碎工况,动臂的浮动结合挖掘机工作装置自身重力,能让破碎锤钎杆对岩石等物体的力相对恒定,无需精确控制动臂下压的力的大小,降低了操作难度和工作强度;动臂双向浮动模式适用于平地工况,只需控制动臂下降的操纵手柄直接推到底,无需不停调整动臂来配合斗杆动作,就能实现良好的平地效果,降低了操作难度和工作强度,同时通过调节浮动电磁阀组的可调节流口,能实现不同硬度地面的平整作业;当进行平地、夯实等作业时,工作装置自身重量满足不了所需向下的力时,可通过手柄按钮暂时浮动功能,恢复至常规模式工作,这样能大大增加挖掘机的作业效率和增适应性。
31.实施例2本实施例介绍实施例1所述挖掘机动臂浮动液压控制系统的控制方法,可由实施例1中的控制器执行,控制方法包括:控制器6获取浮动模式开启状态信息和破碎模式开启状态信息,以及手柄先导阀7的先导油口上的压力信息;若浮动模式和破碎模式均为未开启状态,则控制器6判断目标动臂运行模式为常规模式,控制手柄先导阀7与动臂换向阀3之间的两先导油路导通,有杆腔浮动阀4-1和无杆腔浮动阀4-2为关闭状态;动臂油缸5由操纵手柄通过手柄先导阀7和动臂换向阀3控制动作;在控制动臂提升时,若浮动模式为开启状态,破碎模式为未开启状态,则控制器6判断目标动臂运行模式为上升浮动模式,控制有杆腔浮动阀4-1导通,使得动臂处于上升浮动模式;若浮动模式及破碎模式均为开启状态,当控制动臂下降的操纵手柄动作使得手柄先导阀7对应动臂下降的先导油口与动臂换向阀3的换向控制口导通,且该先导油路压力大于预设值,则控制器6判断目标动臂运行模式为下降浮动模式,控制无杆腔浮动阀4-2导通,并控制浮动先导电磁阀9切断所在的先导油路,使得动臂处于下降浮动模式;若浮动模式为开启状态,破碎模式为未开启状态,当控制动臂下降的操纵手柄推到底,手柄先导阀7对应动臂下降的先导油口所连的先导油路压力大于预设值,则控制器判断目标动臂运行模式为双向浮动模式,控制有杆腔浮动阀4-1和无杆腔浮动阀4-2导通,并
控制浮动先导电磁阀9截断所在的先导油路;当设置于操纵手柄上的浮动取消按钮被按下时,控制器6接收到浮动取消信号,响应于接收到所述浮动取消信号,控制器控制有杆腔浮动阀4-1和无杆腔浮动阀4-2均关闭。
32.综上实施例,本发明能够在不需要对现有成熟的挖掘机液压元件进行升级,且不需要对原挖掘机动臂液压系统进行较大改动的前提下,实现挖机动臂浮动功能。增加的元件少、系统简单、控制逻辑清晰、通用性好、功能容易实现且操作过程的安全性得到提升,技术难度则明显降低。
33.以上结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1