一种智能淤泥清理车的制作方法
1.本实用新型涉及环境治理技术领域,具体为一种智能淤泥清理车。
背景技术:
2.目前污泥的产生量伴随社会的发展正与日俱增,如何对大量的污泥进行有效的处理处置也越来越受到世界不同国家的关注。由于各个国家的具体情况差异性,所采用的污泥处理措施也不尽相同。概括而言,淤泥的处理处置方式主要有海洋倾倒、土地填埋、肥料化、能源化和建材化等。
3.目前,我国淤泥的收集方式往往人工手持铲子将淤泥进行从池塘或河道中铲除,更先进一点采用铲车进行清理,然而在恶劣环境中,采用人工方式进行清淤泥,人工强度大,用人成本都会显著增加,在狭小的环境下,不利于铲车等工具的施展,与此同时,市政管道淤泥污泥泵清理成本高昂。
4.因此市场上急需一种智能淤泥清理车来解决这个问题。
技术实现要素:
5.本实用新型针对现有技术存在之缺失,提出一种智能淤泥清理车,取代了人工将淤泥从池塘、河道或城市管道中清理干净,可采用三种不同模式进行控制适应各种工况,从而对淤泥进行快速清理,实用性强。
6.为实现上述目的,本实用新型采用如下之技术方案:
7.一种智能淤泥清理车,其包括:车辆本体、淤泥收集机构、淤泥存储排放机构、动力系统与控制系统,所述淤泥收集机构设置于车辆本体的一端,所述淤泥存储排放机构、动力系统与控制系统设置于车辆本体的内部,所述控制系统包括手动控制模块、2.4g短程控制模块与5g远程控制模块,所述手动控制模块、2.4g短程控制模块与5g远程控制模块均通过切换开关与动力系统相连接,所述车辆本体的下端设置有移动履带,所述动力系统为淤泥收集机构与移动履带工作提供动力来源。
8.作为对上述技术方案的进一步阐述:
9.在上述技术方案中,所述动力系统包括动力装置与液压驱动装置,所述动力装置与液压驱动装置相连接,所述动力装置带动液压驱动装置工作,从而为淤泥收集机构与移动履带工作提供动力来源,所述动力装置为电动马达或柴油机任意一种。
10.在上述技术方案中,所述移动履带上设置有第一液压马达,所述第一液压马达通过管道与液压驱动装置相连通,通过液压驱动装置带动第一液压马达工作,从而带动移动履带工作,进而使车辆本体进行位移。
11.在上述技术方案中,所述淤泥收集机构包括升降动力组件、清淤泥组件与淤泥传送组件,所述升降动力组件的一端设置于车辆本体的一端,所述清淤泥组件设置于升降动力组件的另一端,所述淤泥传送组件设置于升降动力组件上,所述升降动力组件包括顶升支架、顶升转轴与顶升液压缸,所述顶升支架通过顶升转轴与车辆本体,所述顶升液压缸设
置于顶升支架与车辆本体之间,所述顶升液压缸与液压驱动装置相连通,通过液压驱动装置带动顶升液压缸工作,从而使顶升支架通过顶升转轴在车辆本体的前端进行升降运动。
12.在上述技术方案中,所述清淤泥组件包括清淤泥支架、清淤泥转轴、第二液压马达、第一传动链条与清淤泥收集机,所述清淤泥支架设置于顶升支架上且远离车辆本体的一端,所述清淤泥转轴设置于清淤泥支架上,所述第二液压马达的转轴通过第一传动链条与清淤泥转轴相连接,所述清淤泥收集机设置于清淤泥转轴上,通过液压驱动装置带动第二液压马达工作,使第一传动链条带动清淤泥转轴在清淤泥支架上转动,进而带动清淤泥收集机对池塘里的淤泥进行收集并倒入淤泥传送组件中。
13.在上述技术方案中,所述淤泥传送组件包括淤泥传送转轴、第二传动链条与淤泥传送带,所述淤泥传送转轴设置于顶升支架上且通过第二传动链条与第二液压马达相连接,所述淤泥传送带设置于第二传动链条,通过第二液压马达带动第二传动链条与淤泥传送转轴工作,从而使淤泥传送带承接清淤泥收集机所收集淤泥,并传送至淤泥存储排放机构处。
14.在上述技术方案中,所述淤泥存储排放机构包括淤泥收纳箱与污泥泵,所述淤泥收纳箱与污泥泵均设置于车辆本体的内部,所述车辆本体上设置有水管接口,所述污泥泵分别与水管接口以及淤泥收纳箱相连通,通过污泥泵将淤泥传送组件传送至淤泥收纳箱内部的淤泥通过水管接口与外接水管排出淤泥收纳箱。
15.在上述技术方案中,还包括辅助机构,所述辅助机构包括第三液压马达、绞盘与钢绳,所述绞盘设置于车辆本体上,所述第三液压马达的转轴与绞盘相连接,所述钢绳收卷于绞盘上,所述液压驱动装置带动第三液压马达工作,从而控制绞盘的转动进而控制钢绳的收紧或放松。
16.在上述技术方案中,所述手动控制模块设置于车辆本体的中部,所述2.4g短程控制模块与5g远程控制模块分别位于手动控制装置的两侧。
17.本实用新型与现有技术相比具有明显的优点和有益效果,具体而言,结构新颖,设计合理,通过采用车载清淤泥收集机的设计取代了人工手工清理淤泥,降低了人工劳动强度,加快了清淤泥的工作效率,使用者可通过三种手动、近距离遥控和远程操控的不同方式进行控制,适用于不同工况,实用性强。
18.为更清楚地阐述本实用新型的结构特征、技术手段及其所达到的具体目的和功能,下面结合附图与具体实施例来对本实用新型作进一步详细说明:
附图说明
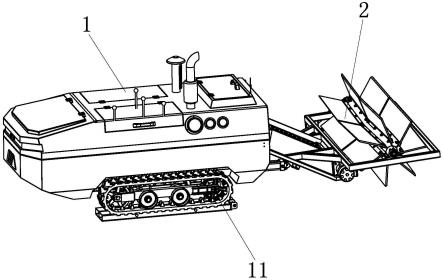
19.图1是本实用新型的整体结构示意图;
20.图2是车辆本体的结构示意图;
21.图3是动力系统与控制系统的结构示意图;
22.图4是车辆本体的内部结构示意图;
23.图5是淤泥收集机构的结构示意图。
具体实施方式
24.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖
直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述实用新型和简化描述,而不是指示或暗示所指的位置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
25.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以视具体情况理解上述术语在本实用新型中的具体含义。
26.如图1-5所示,一种智能淤泥清理车,其包括:车辆本体1、淤泥收集机构2、淤泥存储排放机构3、动力系统4与控制系统5,所述淤泥收集机构2设置于车辆本体1的一端,所述淤泥存储排放机构3、动力系统4与控制系统5设置于车辆本体1的内部,所述控制系统5包括手动控制模块51、2.4g短程控制模块52与5g远程控制模块53,所述手动控制模块51、2.4g短程控制模块52与5g远程控制模块53均通过切换开关与动力系统4相连接,所述车辆本体1的下端设置有移动履带11,所述动力系统4为淤泥收集机构2与移动履带11工作提供动力来源。
27.作为本实用新型的进一步改进,所述动力系统4包括动力装置41与液压驱动装置42,所述动力装置41与液压驱动装置42相连接,所述动力装置41带动液压驱动装置42工作,从而为淤泥收集机构2与移动履带11工作提供动力来源,所述动力装置41为电动马达或柴油机任意一种。
28.作为本实用新型的进一步改进,所述移动履带11上设置有第一液压马达,所述第一液压马达通过管道与液压驱动装置42相连通,通过液压驱动装置42带动第一液压马达工作,从而带动移动履带11工作,进而使车辆本体1进行位移。
29.作为本实用新型的进一步改进,所述淤泥收集机构2包括升降动力组件21、清淤泥组件22与淤泥传送组件23,所述升降动力组件21的一端设置于车辆本体1的一端,所述清淤泥组件22设置于升降动力组件21的另一端,所述淤泥传送组件23设置于升降动力组件21上,所述升降动力组件21包括顶升支架、顶升转轴与顶升液压缸,所述顶升支架通过顶升转轴与车辆本体1,所述顶升液压缸设置于顶升支架与车辆本体1之间,所述顶升液压缸与液压驱动装置42相连通,通过液压驱动装置42带动顶升液压缸工作,从而使顶升支架通过顶升转轴在车辆本体1的前端进行升降运动。
30.作为本实用新型的进一步改进,所述清淤泥组件22包括清淤泥支架、清淤泥转轴、第二液压马达、第一传动链条与清淤泥收集机,所述清淤泥支架设置于顶升支架上且远离车辆本体1的一端,所述清淤泥转轴设置于清淤泥支架上,所述第二液压马达的转轴通过第一传动链条与清淤泥转轴相连接,所述清淤泥收集机设置于清淤泥转轴上,通过液压驱动装置42带动第二液压马达工作,使第一传动链条带动清淤泥转轴在清淤泥支架上转动,进而带动清淤泥收集机对池塘里的淤泥进行收集并倒入淤泥传送组件23中。
31.作为本实用新型的进一步改进,所述淤泥传送组件23包括淤泥传送转轴、第二传动链条与淤泥传送带,所述淤泥传送转轴设置于顶升支架上且通过第二传动链条与第二液压马达相连接,所述淤泥传送带设置于第二传动链条,通过第二液压马达带动第二传动链条与淤泥传送转轴工作,从而使淤泥传送带承接清淤泥收集机所收集淤泥,并传送至淤泥
存储排放机构3处。
32.作为本实用新型的进一步改进,所述淤泥存储排放机构3包括淤泥收纳箱31与污泥泵32,所述淤泥收纳箱31与污泥泵32均设置于车辆本体1的内部,所述车辆本体1上设置有水管接口,所述污泥泵32分别与水管接口以及淤泥收纳箱31相连通,通过污泥泵32将淤泥传送组件23传送至淤泥收纳箱31内部的淤泥通过水管接口与外接水管排出淤泥收纳箱31。
33.作为本实用新型的进一步改进,还包括辅助机构6,所述辅助机构6包括第三液压马达61、绞盘62与钢绳63,所述绞盘62设置于车辆本体1上,所述第三液压马达61的转轴与绞盘62相连接,所述钢绳63收卷于绞盘62上,所述液压驱动装置42带动第三液压马达61工作,从而控制绞盘62的转动进而控制钢绳63的收紧或放松,钢绳63可固定在固定装置如电杆、水泥桩或树桩上,使其能进入不同的工作场地。
34.作为本实用新型的进一步改进,所述手动控制模块51设置于车辆本体1的中部,所述2.4g短程控制模块52与5g远程控制模块53分别位于手动控制装置的两侧。
35.以上仅是本实用新型的较佳实施例而已,并不用以限制本实用新型,故凡是依据本实用新型的技术实际对以上实施例所作的任何修改、等同替换、改进等,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1