一种遥控铲运机的制作方法
1.本实用新型涉及遥控驾驶技术领域,尤其涉及一种遥控铲运机。
背景技术:
2.矿山井下采矿场,采用回采爆破从拉槽一端的切割天井开始,扩井排爆破结束,向凿岩道后退式回采爆破。爆破后铲运机从出矿穿脉进入凿岩道出矿,在爆破的前几排内,铲运机几乎能将爆破的矿石出干净,但随着爆破持续进行,采危险区面积越来越大,根据爆破落矿情况,很多矿石都被抛掷到了较远的危险区里。出于人身安全考虑,人工驾驶铲运机的驾驶室眉线不能进入危险区作业,只能铲出铲臂能铲到范围的矿石,更远处的矿石只能靠自重溜到能铲出的区域。由于矿石自然安息角的原因,最终有一部分矿石留在危险区里不能铲出,从而在采场底部形成永久损失。随着爆破和出矿的进行,人工驾驶铲运机铲不到的堆积留在危险区的矿石将越来越多,造成矿产资源浪费。
3.据初步测算和统计,该采矿方法出于安全考虑,类似危险区域矿石无法回收造成的平均矿石损失率为8%左右。按照开采生产规模8000t/d来计算,每年损失矿石20余万吨。每年因为矿石残留在危险区而不能铲出,一方面降低了资源回采率,造成资源的损失,对矿山的经济效益有一定的影响;另一方面这些残留在危险区的矿石对后期的充填质量形成一定程度的影响。
技术实现要素:
4.本实用新型所要解决的技术问题是针对现有技术的不足,提供一种遥控铲运机。
5.本实用新型解决上述技术问题的技术方案如下:一种遥控铲运机,其包括:车体、用于与车载控制器进行信息交互的第一控制器、视频采集系统、客户端天线、多个ap基站、网络控制系统、遥控座椅,第一控制器、视频采集系统、客户端天线均安装在车体上,第一控制器与车载控制器连接,视频采集系统、客户端天线均与第一控制器连接,多个ap基站、遥控座椅均与网络控制系统连接,客户端天线与多个ap基站无线连接。
6.采用本实用新型技术方案的有益效果是:遥控驾驶铲运机进行工作,同时在安全区域可以正常人工驾驶操控,在危险区出矿时遥控驾驶给司机提供一个安全、舒适的工作环境,便于对残矿进行回收。视频采集系统用于对车辆进行实时监控,保证车辆始终处于安全运行的闭环控制中。
7.进一步地,车体包括:铲斗、前车架、铰接部件、驾驶室、后车架,铲斗与前车架的一端连接,铰接部件的一端与前车架的另一端连接,驾驶室的一端与铰接部件的另一端连接,后车架与驾驶室的另一端连接。
8.采用上述进一步技术方案的有益效果是:车体结构的设计,便于铲运机进行采矿工作,提高铲运机的稳定性以及可靠性。
9.进一步地,第一控制器以及客户端天线均安装在后车架上,第一控制器位于后车架的前部右侧,客户端天线位于后车架的后部。
10.采用上述进一步技术方案的有益效果是:第一控制器用于读取车辆原控制器信息显示车辆相关数据、车辆报警信息及车辆远程视频显示信息等,实现对车辆的实时遥控和监视。
11.进一步地,视频采集系统包括:前视摄像头、左前视摄像头、右前视摄像头、后视摄像头,前视摄像头安装在铰接部件的中部,左前视摄像头安装在后车架的前部左侧,右前视摄像头安装在前车架的右侧,后视摄像头安装在后车架的中部,前视摄像头、左前视摄像头、右前视摄像头以及后视摄像头均与第一控制器连接。
12.采用上述进一步技术方案的有益效果是:传输车辆铰链机构转过角度信号,传输视频信号,传送激光雷达信号。实现视频信号实时采集和显示。摄像头用于实现车辆前后左右四个方向视频图像的实时采集。
13.进一步地,前视摄像头、左前视摄像头、右前视摄像头以及后视摄像头均为红外摄像头,邻近后视摄像头位置处安装有后视激光雷达,邻近前视摄像头位置处安装有前视激光雷达以及编码器,后视激光雷达、前视激光雷达、编码器均与第一控制器连接,前视摄像头、左前视摄像头、右前视摄像头、后视摄像头、前视激光雷达、后视激光雷达均通过支架和橡胶减震柱安装在车体上。
14.采用上述进一步技术方案的有益效果是:传输车辆铰链机构转过角度信号,传输视频信号,传送激光雷达信号。实现视频信号实时采集和显示。安装使用红外视频采集摄像头,摄像头用于实现车辆前后左右四个方向视频图像的实时采集。激光雷达的设置,为车辆安全驾驶提供了辅助保障功能。摄像头和激光雷达底部支架上采用橡皮减震柱支撑安装,采用减震柱安装避免车体在行驶过程中产生大的振动对摄像头和雷达产生影响,另外有效的抑制系统之间产生共振,尤其是车辆在行驶过程中效果比较好。
15.进一步地,驾驶室中安装有视距内遥控接收器,视距内遥控接收器与第一控制器连接,第一控制器无线连接有与视距内遥控接收器适配的视距内遥控器。
16.采用上述进一步技术方案的有益效果是:视距内遥控接收器经由第一控制器与视距内遥控器实现视距内遥控车辆。通过视距内遥控器能够实现遥控器与车载系统之间的近距离可视操作,保证司机在距离车体视觉范围内进行遥控操作。
17.进一步地,车体上设置有刹车制动阀、第一电磁阀、第一比例减压阀、转向先导阀、第二电磁阀、第三电磁阀、第二比例换向阀、动臂先导阀、铲斗先导阀、反馈阀、第三比例换向阀,第一电磁阀与第一比例减压阀并联,第一电磁阀与刹车制动阀串联,第二电磁阀与转向先导阀连接,第三电磁阀以及第二比例换向阀均与转向先导阀并联,动臂先导阀以及铲斗先导阀均与反馈阀连接,动臂先导阀以及铲斗先导阀均与第三比例换向阀并联,第一电磁阀、第一比例减压阀、第二电磁阀、第三电磁阀、第二比例换向阀、反馈阀以及第三比例换向阀均与第一控制器连接。
18.采用上述进一步技术方案的有益效果是:实现对铲运机的行走、转向及铲斗的提升降落等控制。当司机在驾驶室操作时转换开关转换到本地操作,其功能和操作与原来完全相同。实现遥控座椅与车辆之间无线信号传输,保证司机遥控信号实时传送给车辆接收端,车辆根据接收指令执行铲矿、行走及卸矿动作,同时通过无线ap基站接收车辆视频信息、激光雷达等信息,通过遥控座椅显示屏实时显示,司机实时掌握车辆前、后、左、右信息,实现人机交互功能,保证司机精准的控制车辆。车体上液压系统的改装,实现车辆行车制动
等各项动作。通过在原车刹车制动阀串联开关电磁阀,电磁阀p和a两端并联比例减压阀实现远程电信号控制,从而实现操作台行车制动。增加远程转向控制,在原车转向先导阀的两条工作油路上增加常通开关电磁阀,并在先导阀的p、t油路并联电磁阀、比例换向阀,在本地模式时,维持原车油路不变,远程模式时关闭原车油路,实现电比例转向控制。实现大臂提升和铲斗控制,分别在原车动臂和铲斗先导阀的两条工作油路上增加常通开关电磁阀,并在先导阀的p、t油路并联电磁比例换向阀,实现在本地模式时,维持原车油路不变,远程模式时关闭原车油路,实现大臂和铲斗本地远程切换控制。通过液压系统油路切换,实现本地和远程之间转向、铲斗、刹车、大臂升降等切换。本地模式时,开关阀把远程控制的比例阀切除,油直接通过原来控制阀体实现各个动作的切换;当远程控制时,把原控制阀切除,通过开关阀和比例阀实现转向、大臂及铲斗等控制,通过调整比例阀的给定,实现远程控制和本地控制速度和方向反应的一致性,给驾驶司机提供与本地操作一致的反应速度。
19.进一步地,第二电磁阀以及反馈阀均为常通开关电磁阀。
20.采用上述进一步技术方案的有益效果是:实现在本地模式时,维持原车油路不变,远程模式时关闭原车油路,实现电比例转向控制,大臂和铲斗本地远程切换控制。通过液压系统油路切换,实现本地和远程之间转向、铲斗、刹车、大臂升降等切换。本地模式时,开关阀把远程控制的比例阀切除,油直接通过原来控制阀体实现各个动作的切换;当远程控制时,把原控制阀切除,通过开关阀和比例阀实现转向、大臂及铲斗等控制,通过调整比例阀的给定,实现远程控制和本地控制速度和方向反应的一致性,给驾驶司机提供与本地操作一致的反应速度。
21.进一步地,网络控制系统为多个网络控制箱,多个网络控制箱与遥控座椅连接,多个ap基站一一对应与多个网络控制箱连接。
22.采用上述进一步技术方案的有益效果是:实现遥控座椅与车辆之间无线信号传输,保证司机遥控信号实时传送给车辆接收端,车辆根据接收指令执行铲矿、行走及卸矿动作,同时通过无线ap基站接收车辆视频信息、激光雷达等信息,通过遥控座椅显示屏实时显示,司机实时掌握车辆前、后、左、右信息,实现人机交互功能,保证司机精准的控制车辆。
23.进一步地,遥控座椅包括:本体、第二控制器、遥控手柄和按键、刹车、油门、显示屏,第二控制器安装在本体中,遥控手柄和按键以及显示屏均安装在本体上,刹车和油门转动安装在本体的底部,遥控手柄和按键、刹车、油门、显示屏均与第二控制器连接,第二控制器与网络控制系统连接。
24.采用上述进一步技术方案的有益效果是:实现视频信号实时采集和显示,显示车辆可行驶区域。控制和显示车辆实时信息,通过遥控方式对铲运机刹车、油门、行走、转向及铲斗进行遥控,铲运机司机遥控铲运机进入采矿区、危险区及眉线内铲矿出矿,司机在外部相对安全舒适的遥控座椅上操控,铲运机行驶到安全区后,根据司机自己操控需求,可遥控操作也可以上车驾驶操控运矿和出矿。通过遥控座椅实现对整个车辆的操控、查看视频及设备状态信息。通过遥控座椅显示屏实时显示,司机实时掌握车辆前、后、左、右信息,实现人机交互功能,保证司机精准的控制车辆。
25.本实用新型附加的方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型实践了解到。
附图说明
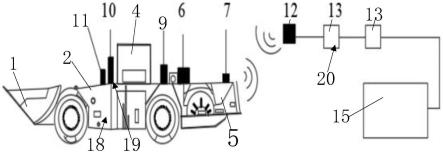
26.图1为本实用新型实施例提供的设备安装俯视图。
27.图2为本实用新型实施例提供的设备安装侧视图。
28.图3为本实用新型实施例提供的刹车系统液压改装图。
29.图4为本实用新型转向液压改装图。
30.图5为本实用新型大臂铲斗液压改装图。
31.图6为本实用新型实施例提供的网络系统拓扑图之一。
32.图7为本实用新型实施例提供的网络系统拓扑图之二。
33.图8为本实用新型实施例提供的网络系统拓扑图之三。
34.图9为本实用新型实施例提供的控制及视频采集信号图。
35.图10为本实用新型实施例提供的控制线路图。
36.图11为本实用新型实施例提供的驾驶权的总线切换原理图。
37.图12为本实用新型实施例提供的遥控座椅的结构示意图。
38.附图标号说明:1、铲斗;2、前车架;3、铰接部件;4、驾驶室;5、后车架;6、第一控制器;7、客户端天线;8、左前视摄像头;9、后视摄像头;10、前视摄像头;11、右前视摄像头;12、ap基站;13、网络控制箱;15、遥控座椅;16、视距内遥控接收器;17、视距内遥控器;18、车体;19、视频采集系统;20、网络控制系统;21、刹车制动阀;22、第一电磁阀;23、第一比例减压阀;24、转向先导阀;25、第二电磁阀;26、第三电磁阀;27、第二比例换向阀;28、动臂先导阀;29、铲斗先导阀;30、反馈阀;31、第三比例换向阀;32、减压阀;33、比例调节阀;34、转向缸;35、发动机;36、大臂阀;37、灯;38、喇叭;39、启停按钮;40、停止按钮;41、转向手刹;42、大臂手柄;43、急停按钮;44、前进后退按钮;45、刹车;46、油门;47、喇叭和灯光按钮;48、显示屏;49、第二控制器;50、车载控制器;51、k18继电器;52、本体;54、遥控手柄和按键。
具体实施方式
39.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
40.如图1至图12所示,本实用新型实施例提供了一种遥控铲运机,其包括:车体18、用于与车载控制器50进行信息交互的第一控制器6、视频采集系统19、客户端天线7、多个ap基站12、网络控制系统20、遥控座椅15,第一控制器6、视频采集系统19、客户端天线7均安装在车体18上,第一控制器6与车载控制器50连接,视频采集系统19、客户端天线7均与第一控制器6连接,多个ap基站12、遥控座椅15均与网络控制系统20连接,客户端天线7与多个ap基站12无线连接。
41.采用本实用新型技术方案的有益效果是:遥控驾驶铲运机进行工作,同时在安全区域可以正常人工驾驶操控,在危险区出矿时遥控驾驶给司机提供一个安全、舒适的工作环境,便于对残矿进行回收。视频采集系统用于对车辆进行实时监控,保证车辆始终处于安全运行的闭环控制中。
42.其中,铲运机自带控制器为车载控制器50。第一控制器的型号可以为cr0020。
43.图7中的箭头方向为信号传输方向,图中“无线信号”右侧设备为车上新增远程驾驶设备,“无线信号”左侧为安装在车辆以外的新增设备,其中车上设备和车外设备实现无
线通讯。
44.图7中,车辆驾驶及视频信号采集,信号从左到右是驾驶员远方驾驶时信号方向。司机车辆外远端驾驶座椅给出各种行车指令,通过交换机(设置在网络控制箱中)、无线ap基站(简称ap基站,(wireless)access point,无线访问接入点),信号到达车辆无线客户端,经过网络交换机传输给可编程控制器,使车辆完成司机要求动作。视频信号经过车辆上交换机经客户端天线发送给无线ap,信号最终经网络交换机到驾驶座椅端在工控机上进行显示,为司机安全驾驶提供视频信息。
45.具体地,图7中,左侧虚线框为车外设备,右侧虚线框为车载设备,车外设备包括包含可编程控制器和工控机的遥控座椅15、包含网络交换机的网络控制箱13、用于无线传输的ap基站12,遥控座椅15、网络控制箱13、ap基站12依次双向连接,车载设备包括:客户端天线7、网络交换机和可编程控制器集成一体的第一控制器6、发动机35、转向先导阀24、大臂阀36、铲斗先导阀29、灯37、刹车制动阀21、喇叭38、前视摄像头10、后视摄像头9、左前视摄像头8、右前视摄像头11,其中,ap基站12与第一控制器6双向连接,可编程控制器通过启停控制电路与发动机35连接,可编程控制器通过转向电路与转向先导阀24连接,可编程控制器通过大臂控制电路与大臂阀36连接,可编程控制器通过铲斗控制电路与铲斗先导阀29连接,可编程控制器通过速度控制电路与发动机35连接,可编程控制器通过灯光控制电路与灯37连接,可编程控制器通过刹车控制电路与刹车制动阀21连接,可编程控制器通过喇叭控制电路与喇叭38连接;前视摄像头10、后视摄像头9、左前视摄像头8、右前视摄像头11通过车辆视频电路与网络交换机连接。
46.图8中箭头方向表示信号流通方向。遥控座椅通过tcp/ip(transmission control protocol/internet protocol,核心协议)与网络交换机进行通讯,网络交换机通过光纤与另外一台、两台或多台交换机进行通讯,交换机与无线ap基站通过超六类网线进行一对一连接,ap基站覆盖车辆行驶区段,保证车载无线与控制设备之间实现良好通讯。超六类网线是目标在40℃以上仍可正常运行的高性能布线系统。
47.图8与在图7的基础上进一步展示了车外设备的内部结构,车外设备包括:包含网络交换机的网络控制箱13、用于无线传输的ap基站12、遥控座椅内部集成了第二控制器49和工控机,遥控座椅的外部安装有启停按钮39、停止按钮40、转向手刹41、大臂手柄42、急停按钮43、前进后退按钮44、刹车45、油门46、喇叭和灯光按钮47、显示屏48,启停按钮39、停止按钮40、转向手刹41、大臂手柄42、急停按钮43、前进后退按钮44、刹车45、油门46、喇叭和灯光按钮47均与第二控制器49连接,显示屏48与工控机连接,工控机和第二控制器均与网络控制箱连接。
48.图6和图9中,遥控座椅15与网络控制箱13连接,网络控制箱13与ap基站12连接,ap基站12与客户端天线7无线连接,客户端天线7与第一控制器6连接,第一控制器6与车载控制器50连接。
49.本实用新型实施例用于地下危险区域出矿遥控铲运机车辆,包括可编程控制器(即第一控制器)、摄像头、遥控座椅、激光雷达、交换机、视频解码终端、编码器、无线ap基站、视距内遥控器、人机接口、液压阀、比例阀。遥控座椅中的控制器(即第二控制器)发出车辆控制信号,通过网络设备和无线基站转发给铲运机上新增可编程控制器(第一控制器),经由网络交换设备以can(controller area network,控制器局域网络)总线通讯方式发送
给车体上新增可编程控制器(第一控制器)执行相应行驶指令,具体为,通过总线和无线基站发给铲运机上新增可编程控制器,控制器输出电信号驱动液压阀,铲运机实现遥控启动、停止、行驶、转向等动作。原来铲运机只有车上驾驶室内司机操作车辆铲矿、运矿和卸矿。车辆运行状态信号、视频信号、雷达信号、发动机报警信号及故障信号通过车载无线通信终端、无线ap基站实时反馈给人机接口视频显示系统,由人机接口液晶显示屏显示铲运机周界视频信息,使操控人员根据反馈车辆视频信息,对车辆进行实时监控,保证车辆始终处于安全运行的闭环控制中。
50.一种遥控铲运机,可以用于地下危险区域出矿,包括控制箱(第一控制器安装在控制箱中)、客户端天线、支架及左前视摄像头、支架、后视摄像头及激光雷达、支架、前视摄像头及前视激光雷达和编码器、支架及右前视摄像头、ap基站、网络控制箱、远程遥控端(即遥控座椅)、视距内遥控接收器、视距内遥控器。
51.远程遥控端经can总线、视频解码终端、网络控制箱、ap基站、客户端天线、发送驱动指令经解码后给控制箱内可编程控制器,实现对铲运机的行走、转向及铲斗的提升降落等控制。
52.控制箱经can总线模块、视频解码终端、客户端天线、ap基站、网络控制箱、远程遥控端反馈车辆运行状态和报警信息。
53.支架及左前视摄像头、支架、后视摄像头及激光雷达、支架、前视摄像头及前视激光雷达和编码器、支架及右前视摄像头分别与控制箱通过cat6a连接传输视频信号。
54.支架、后视摄像头及激光雷达、支架、前视摄像头及前视激光雷达和编码器、分别与控制箱通过屏蔽线缆连接传送激光雷达信号。
55.支架、前视摄像头及前视激光雷达和编码器与控制箱传输车辆铰链机构转过角度信号。
56.控制箱经由客户端天线和ap基站网络控制箱、网络控制箱数据经由can总线传送给远程遥控端(遥控座椅)实现视频信号实时采集、传输、液晶屏和显示。
57.控制箱经由客户端天线和ap基站、第一网络控制箱、第二网络控制箱数据经由can总线传送给远程遥控端显示车辆可行驶区域。
58.视距内遥控接收器经由控制箱与视距内遥控器实现视距内遥控车辆。
59.通过控制设备(可编程第一控制器、第二控制器)、网络设备(网络控制箱)、视频采集设备(摄像头)、基于5.8g工业级无线wifi(wireless-fidelity,无线保真)信号基站(ap基站)及人机接口设备、液压阀、液压流体设备等,遥控和显示铲运机运行的实时状态和相关信息,控制和显示车辆实时信息,通过遥控方式对铲运机刹车、油门、行走、转向及铲斗进行遥控,铲运机司机遥控铲运机进入采矿区、危险区及眉线内铲矿出矿,司机在外部相对安全舒适的遥控座椅上操控,铲运机行驶到安全区后,根据司机自己操控需求,可遥控操作也可以上车驾驶操控运矿和出矿。本地和遥控驾驶一键切换操作,实现方便,给司机操作提供方便。
60.车体上安装控制箱及可编程控制器(第一控制器)、摄像头、客户端天线、激光雷达、编码器、液压阀、比例阀等设备,箱内新增控制器(即第一控制器)和基于can总线的通讯模块采集车辆信息,车本体控制器与新增控制器之间通过can总线通信,读取车辆原控制器(车载控制器50)信息传送给智能遥控座椅的后台,在液晶显示屏显示车辆实时状态、车辆
报警信息及车辆周边视频信息等,实现对车辆的遥控和监视,从而安全可靠完成铲运机铲矿、行走和卸矿功能。新增控制器读取车辆原控制器信息显示车辆相关数据、车辆报警信息及车辆远程视频显示信息等,实现对车辆的实时遥控和监视,从而实现铲运机铲矿行走和卸矿功能。其中,液压阀的型号可以为ks-2021056。
61.实现司机远程遥控操作铲运机,操作效果及显示效果和司机在驾驶室操作相同,遥控时进入采矿区、凿岩道和危险区域里铲矿出矿,给司机提供一个安全和相对舒适的作业环境,避免司机随车进入危险区域时给司机造成的安全隐患,同时可以对残矿进行回收。
62.车体上增加用于遥控驾驶铲运机的远程控制器(第一控制器):结合车身控制器(车载控制器50)控制及通讯特点,研究目前铲运机电子领域can现场总线的特点,根据铲运机实际遥控需求,选择基于can总线的控制器进行远程模式下的控制;同时方便本地操控时顺利切换。新增功能包括远程遥控发动机启停控制、车辆前进后退、大臂升降、铲斗的上升和下降,此外还包括遥控刹车、油门、1、2、3档位、前后照明灯控制功能。当司机在驾驶室操作时转换开关转换到本地操作,其功能和操作与原来完全相同。
63.进一步,安装使用遥控座椅,遥控座椅即操作平台,通过遥控座椅实现对整个车辆的操控、查看视频及设备状态信息。遥控座椅包括控制器(第二控制器)、操作台、遥控手柄和按键、刹车油门、液晶显示屏、嵌入式数据分析处理器、视频处理显示软件、状态信息处理显示软件等。
64.进一步,安装使用红外视频采集摄像头,摄像头实现车辆前后左右四个方向视频图像的实时采集、遥控座椅端液晶屏显示,是操作人员对车辆进行远程操控的接口设备,由高清红外摄像头、嵌入式视频采集模块、无线网桥、通讯模块等组成。
65.进一步,增加5g无线ap基站,无线网络采用高带宽、低延时的漫游wifi网络,无线ap基站布置在车辆运行的路线及危险区内,通过5g无线基站,实现遥控座椅与车辆之间无线信号传输,保证司机遥控信号实时传送给车辆接收端,车辆根据接收指令执行铲矿、行走及卸矿动作,同时通过无线ap基站接收车辆视频信息、激光雷达等信息,通过遥控座椅显示屏实时显示,司机实时掌握车辆前、后、左、右信息,实现人机交互功能,保证司机精准的控制车辆。
66.进一步,安装使用前后激光雷达,激光雷达是环境感知传感器,在目标检测上采用了深度学习技术,模糊算法及先进的测试技术大幅提高了其效率和覆盖率,为车辆安全驾驶提供了辅助保障功能。
67.进一步,增加视距内遥控器,通过视距内遥控器可以实现遥控器与车载系统之间的近距离可视操作,保证司机在距离车体视觉范围内进行遥控操作。
68.进一步,车体上液压系统改装,实现车辆行车制动等各项动作。通过在原车刹车制动阀串联开关电磁阀,电磁阀p和a两端并联比例减压阀实现远程电信号控制,从而实现操作台行车制动。增加远程转向控制,在原车转向先导阀的两条工作油路上增加常通开关电磁阀,并在先导阀的p、t油路并联电磁阀、比例换向阀,在本地模式时,维持原车油路不变,远程模式时关闭原车油路,实现电比例转向控制。实现大臂提升和铲斗控制,分别在原车动臂和铲斗先导阀的两条工作油路上增加常通开关电磁阀,并在先导阀的p、t油路并联电磁比例换向阀,实现在本地模式时,维持原车油路不变,远程模式时关闭原车油路,实现大臂和铲斗本地远程切换控制。
69.如图1至图12所示,进一步地,车体18包括:铲斗1、前车架2、铰接部件3、驾驶室4、后车架5,铲斗1与前车架2的一端连接,铰接部件3的一端与前车架2的另一端连接,驾驶室4的一端与铰接部件3的另一端连接,后车架5与驾驶室4的另一端连接。
70.采用上述进一步技术方案的有益效果是:车体结构的设计,便于铲运机进行采矿工作,提高铲运机的稳定性以及可靠性。
71.车体的支架主体结构采用6mm厚铁板预制件,配套结构件采用4-6mm厚板材,板材材料保证结构强度满足长期使用要求及振动防护等级要求。板材结构件之间连接均采用不锈钢螺栓连接,相应连接孔均采用条形孔,保证上下安装调整方便,采用不锈钢螺栓避免长期使用螺栓生锈造成不易调整和拆卸;摄像头方向采用紧固螺栓调整,两侧的紧固螺丝只需使用螺丝刀即可调节摄像头上下方向,从而保证满足不同司机对视觉使用需求。
72.控制箱安装在右后轮胎防护板正上方,距离边缘0.55m,内含可编程控制器cr0020、交换机gw-9000-4505g、直流电源、视频解码终端、gcan-212can总线模块、继电器。主要作用接收来自遥控座椅端输入信号,通过网络接收来自遥控座椅控制铲运机各种指令,控制铲运机完成行走、铲装及转向等各种动作。客户端天线与无线ap基站、控制箱(网络控制箱)内交换机进行通讯,安装在铲运机尾部,距离左后方1.25m处,完成车载端和ap基站信号双向传输。支架及左前视、后视摄像头;安装在车辆后车架左侧距离驾驶室后部1.15m处,距离边缘0.45m,主要采集车辆左前方轮胎及距离左侧凿岩道距离视频信息,摄像头采用sw-ms2118cs-c高清摄像头,信号通过网络传送到控制箱内,经过视频解码终端到交换机,经客户端天线、无线ap传送给遥控座椅端内交换机,通过工控机进行视频图像显示。支架、前视摄像头安装在车辆驾驶室正前方铰链中心位置,距离两侧各0.55m,监视铲运机正前方和铲斗视频信息;支架及右前视摄像头,安装在控制箱前距离1.28m处,左侧边缘距离驾驶室0.65m,主要采集车辆右前方轮胎及右前方距离凿岩道距离视频信息,保证车辆行驶安全距离;ap基站采用多倍通工业级无线基站,型号db6000aclt-pro-kb 5.8g,安装在危险区域周边及车辆行驶区域内凿岩道侧壁上,给车载端可编程控制器发送指令,把车辆周边视频信息传递给遥控座椅端,实现人机接口显示功能;网络控制箱内含网络交换机kp-900-65-2gx8gt-sc20,主要完成无线ap基站和遥控座椅端信息传送;远程遥控座椅端内含mic-770q-00a1嵌入式工控机、可编程控制器spc-sfmc-x2214a、wdr-240-dc24v开关电源、can扩展卡mos-2230-z1201e、交换机gw-9000-4505g、左右手柄c25-s077,此外还包括重卡油门踏板和958h刹车踏板。主要完成司机远程驾驶铲运机运输,同时在人机接口端进行车辆和视频信息显示。
73.如图1至图12所示,进一步地,第一控制器6以及客户端天线7均安装在后车架5上,第一控制器6位于后车架5的前部右侧,客户端天线7位于后车架5的后部。
74.采用上述进一步技术方案的有益效果是:第一控制器用于读取车辆原控制器信息显示车辆相关数据、车辆报警信息及车辆远程视频显示信息等,实现对车辆的实时遥控和监视。
75.控制箱、控制操作台引入线缆和接头采用ip56(international degree of protect,防护等级)防护等级的插头连接,插头的防护满足防尘、防水的要求;进一步,采用插头连接保证拆装方便,安装rj45s-wm08staf防呆公头插头保证使用人不会出现误插。具有防呆头设计保证使用人不会出现误插,让操作者不需要花费太多注意力、也不需要经验
与专业知识即可准确无误完成正确的操作。
76.如图1至图12所示,进一步地,视频采集系统19包括:前视摄像头10、左前视摄像头8、右前视摄像头11、后视摄像头9,前视摄像头10安装在铰接部件3的中部,左前视摄像头8安装在后车架5的前部左侧,右前视摄像头11安装在前车架2的右侧,后视摄像头9安装在后车架5的中部,前视摄像头10、左前视摄像头8、右前视摄像头11以及后视摄像头9均与第一控制器6连接。
77.采用上述进一步技术方案的有益效果是:传输车辆铰链机构转过角度信号,传输视频信号,传送激光雷达信号。实现视频信号实时采集和显示。摄像头用于实现车辆前后左右四个方向视频图像的实时采集。
78.支架及左前视、后视摄像头、支架、前视摄像头、支架及右前视摄像头分别与控制箱通过超六类网线连接传输视频信号。
79.如图1至图12所示,进一步地,前视摄像头10、左前视摄像头8、右前视摄像头11以及后视摄像头9均为红外摄像头,邻近后视摄像头9位置处安装有后视激光雷达,邻近前视摄像头10位置处安装有前视激光雷达以及编码器,后视激光雷达、前视激光雷达、编码器均与第一控制器6连接,前视摄像头10、左前视摄像头8、右前视摄像头11、后视摄像头9、前视激光雷达、后视激光雷达均通过支架和橡胶减震柱安装在车体18上。
80.采用上述进一步技术方案的有益效果是:传输车辆铰链机构转过角度信号,传输视频信号,传送激光雷达信号。实现视频信号实时采集和显示。安装使用红外视频采集摄像头,摄像头用于实现车辆前后左右四个方向视频图像的实时采集。激光雷达的设置,为车辆安全驾驶提供了辅助保障功能。摄像头和激光雷达底部支架上采用橡皮减震柱支撑安装,采用减震柱安装避免车体在行驶过程中产生大的振动对摄像头和雷达产生影响,另外有效的抑制系统之间产生共振,尤其是车辆在行驶过程中效果比较好。
81.其中,支架、激光雷达以及摄像头可以集成一体设置。摄像头的型号可以为sw-ms2118cs-c红外高清摄像头。
82.摄像头和激光雷达底部支架上采用橡皮减震柱支撑安装,采用减震柱安装避免车体在行驶过程中产生大的振动对摄像头和雷达产生影响,另外可有效的抑制系统之间产生共振,尤其是车辆在行驶过程中效果比较好。
83.基站(ap基站)安装采用管材抱箍方式安装,只需要紧固两个螺栓即可安装固定好基站,方便快捷。基站接收采用万向节方式调整,可以方便基站在各个方向上进行调整,从而实现最大程度上接收无线线号。
84.如图1至图12所示,进一步地,驾驶室4中安装有视距内遥控接收器16,视距内遥控接收器16与第一控制器6连接,第一控制器6无线连接有与视距内遥控接收器16适配的视距内遥控器17。
85.采用上述进一步技术方案的有益效果是:视距内遥控接收器经由第一控制器与视距内遥控器实现视距内遥控车辆。通过视距内遥控器能够实现遥控器与车载系统之间的近距离可视操作,保证司机在距离车体视觉范围内进行遥控操作。
86.如图1至图12所示,进一步地,车体18上设置有刹车制动阀21、第一电磁阀22、第一比例减压阀23、转向先导阀24、第二电磁阀25、第三电磁阀26、第二比例换向阀27、动臂先导阀28、铲斗先导阀29、反馈阀30、第三比例换向阀31,第一电磁阀22与第一比例减压阀23并
联,第一电磁阀22与刹车制动阀21串联,第二电磁阀25与转向先导阀24连接,第三电磁阀26以及第二比例换向阀27均与转向先导阀24并联,动臂先导阀28以及铲斗先导阀29均与反馈阀30连接,动臂先导阀28以及铲斗先导阀29均与第三比例换向阀31并联,第一电磁阀22、第一比例减压阀23、第二电磁阀25、第三电磁阀26、第二比例换向阀27、反馈阀30以及第三比例换向阀31均与第一控制器6连接。
87.具体地,第一电磁阀22的第一端与刹车制动阀21连接,第一比例减压阀23包括减压阀32和比例调节阀33,第一电磁阀21的第二端与减压阀的一端连接,减压阀的另一端与比例调节阀的一端连接,比例调节阀的另一端与第一电磁阀21的第三端连接。
88.转向先导阀24的第一端与第二比例换向阀27的第一端以及第二端连接,转向先导阀24的第二端与第三电磁阀26的第一端以及第二端连接,转向先导阀24的第三端与第二电磁阀25连接,第二比例换向阀27第三端与第三电磁阀26的第三端连接,转向先导阀24的第一端和第二端与转向缸34连接。
89.动臂先导阀28与铲斗先导阀29连接,动臂先导阀28与反馈阀30的一端连接,反馈阀30的另一端与第三比例换向阀31连接。
90.采用上述进一步技术方案的有益效果是:实现对铲运机的行走、转向及铲斗的提升降落等控制。当司机在驾驶室操作时转换开关转换到本地操作,其功能和操作与原来完全相同。实现遥控座椅与车辆之间无线信号传输,保证司机遥控信号实时传送给车辆接收端,车辆根据接收指令执行铲矿、行走及卸矿动作,同时通过无线ap基站接收车辆视频信息、激光雷达等信息,通过遥控座椅显示屏实时显示,司机实时掌握车辆前、后、左、右信息,实现人机交互功能,保证司机精准的控制车辆。车体上液压系统的改装,实现车辆行车制动等各项动作。通过在原车刹车制动阀串联开关电磁阀,电磁阀p和a两端并联比例减压阀实现远程电信号控制,从而实现操作台行车制动。增加远程转向控制,在原车转向先导阀的两条工作油路上增加常通开关电磁阀,并在先导阀的p、t油路并联电磁阀、比例换向阀,在本地模式时,维持原车油路不变,远程模式时关闭原车油路,实现电比例转向控制。实现大臂提升和铲斗控制,分别在原车动臂和铲斗先导阀的两条工作油路上增加常通开关电磁阀,并在先导阀的p、t油路并联电磁比例换向阀,实现在本地模式时,维持原车油路不变,远程模式时关闭原车油路,实现大臂和铲斗本地远程切换控制。通过液压系统油路切换,实现本地和远程之间转向、铲斗、刹车、大臂升降等切换。本地模式时,开关阀把远程控制的比例阀切除,油直接通过原来控制阀体实现各个动作的切换;当远程控制时,把原控制阀切除,通过开关阀和比例阀实现转向、大臂及铲斗等控制,通过调整比例阀的给定,实现远程控制和本地控制速度和方向反应的一致性,给驾驶司机提供与本地操作一致的反应速度。
91.通过液压系统油路切换,实现本地和远程之间转向、铲斗、刹车、大臂升降等切换。本地模式时,开关阀把远程控制的比例阀切除,油直接通过原来控制阀体实现各个动作的切换;当远程控制时,把原控制阀切除,通过开关阀和比例阀实现转向、大臂及铲斗等控制,通过调整比例阀的给定,实现远程控制和本地控制速度和方向反应的一致性,给驾驶司机提供与本地操作一致的反应速度。例如刹车时,通过继电器输出电信号带动刹车电液阀实现刹车,左右转时通过输出信号给左右转向的电液阀实现对铲运机的转向,车辆其它动作与以上相同,不再一一陈述。其中,比例阀的型号可以为ks-2021057。
92.遥控座椅发出行车指令,信号通过第一网络控制箱、第二网络控制箱传输给ap基
站,进一步以无线方式发送给客户端天线,控制箱接收来自客户端天线信号,经过逻辑分析、判断处理后,控制箱内继电器输出,通过电信号输出给电液阀,通过控制液压油通断和油压大小来控制车辆各种动作及车辆速度。
93.如图1至图12所示,进一步地,第二电磁阀25以及反馈阀30均为常通开关电磁阀。
94.采用上述进一步技术方案的有益效果是:实现在本地模式时,维持原车油路不变,远程模式时关闭原车油路,实现电比例转向控制,大臂和铲斗本地远程切换控制。通过液压系统油路切换,实现本地和远程之间转向、铲斗、刹车、大臂升降等切换。本地模式时,开关阀把远程控制的比例阀切除,油直接通过原来控制阀体实现各个动作的切换;当远程控制时,把原控制阀切除,通过开关阀和比例阀实现转向、大臂及铲斗等控制,通过调整比例阀的给定,实现远程控制和本地控制速度和方向反应的一致性,给驾驶司机提供与本地操作一致的反应速度。
95.可编程控制器(第一控制器)接收来自智能遥控座椅(遥控座椅)的驱动信号,经do通道(开关量输出可以是继电器或大功率管等)、pwm(pulse width modulation,脉冲宽度调制)通道输出驱动电液开关阀和比例阀,实现对转向、转速和铲斗等动作的精准控制,同时经can总线与原来控制器(车载控制器50)通讯,读取车辆发动机、液压油温、油位、水温、变矩器等信号,经过网络传输给驾驶座椅端的人机接口,司机根据显示情况对铲运机有更全面了解,保证遥控驾驶的安全可靠。
96.车体上增加一个cr0020可编程控制器,通过继电器切换,实现本地和远程驾驶车辆的切换功能。本地驾驶时,发动机只接收来自原车控制器发送的指令;当切换到遥控操作时,通过继电器把原来控制器通讯断开,发动机只接收来自可编程控制器的驾驶指令并按指令执行。
97.图10和图11中通讯接口说明:图10为第二控制器及其相关电路结构,图10最右侧为远控端,用于与网络控制箱连接。中部接口继电器k端从左至右依次连接解除制动、刹车、发动机启动、空档信号、1档、2档、3档、前进、倒车、手柄阀旁通、脚踏旁通、总线切换、前照、后照、喇叭、mr电源、左转弯、右转弯、铲斗上、铲斗下、大臂上、大臂下、脚踏阀。图11中上部分图是车载控制器及其相关电路结构,通过can总线1939h、1939l(位于图11左下端)和发动机进行通讯,图11下半部分新增可编程控制器(即第一控制器及其相关电路结构)是遥控时工作,当本地开关切换到远程时,k18继电器51吸合,新增可编程控制器can1_h、can1_l与发动机通讯,原控制器(车载控制器)通讯被断开,发动机接收来自新控制器(第一控制器)指令。当切换到本地操作时,k18继电器51断开,原控制器与发动机进行通讯,铲运机执行原控制器的控制指令。此部分是通讯权的切换,即谁控制谁与发动机进行通讯,同时切断另外一个控制器与发动机的通讯,图11中,车载控制器的右侧为车载显示屏,第一控制器的最右侧为远控端,用于与ap基站连接。图11车载控制器上部的开关从左至右依次为解除制动、刹车、蓄能欠压、液压油位报警、拖车开关以及压力传感器。车载控制器下方的端口依次为can、电源/地、制动刹车阀、前后桥制动阀、蜂鸣器、制动解除灯、刹车灯、脚踏油门(双油门)、温度传感器、通讯串口、显示屏。第一控制器中部的接口从左至右依次为解除制动、刹车、发动机启动、空档信号、1档、2档、3档、前进、倒车、手柄阀旁通、脚踏旁通、总线切换、前照、后照、喇叭、mr电源、左转弯、右转弯、铲斗上、铲斗下、大臂上、大臂下、脚踏阀。
98.两个控制器之间驾驶权的总线切换,当执行遥控操作时,位于控制箱内k18继电器
51得电吸合(其中k18继电器51得电时接通发动机与cr0020控制器(第一控制器),断开时发动机与原车控制器接通并进行通讯),新增可编程控制器(第一控制器)工作,接收来自遥控座椅驾驶指令,根据指令执行铲矿、行走和卸矿工作。就地操控时,k18继电器51断开,司机在驾驶室对铲运机进行操作。
99.如图1至图12所示,进一步地,网络控制系统20为多个网络控制箱13,多个网络控制箱13与遥控座椅15连接,多个ap基站12一一对应与多个网络控制箱13连接。
100.采用上述进一步技术方案的有益效果是:实现遥控座椅与车辆之间无线信号传输,保证司机遥控信号实时传送给车辆接收端,车辆根据接收指令执行铲矿、行走及卸矿动作,同时通过无线ap基站接收车辆视频信息、激光雷达等信息,通过遥控座椅显示屏实时显示,司机实时掌握车辆前、后、左、右信息,实现人机交互功能,保证司机精准的控制车辆。
101.其中,ap基站的型号可以为db6000,交换机13可以为kp-9000-65-2gx8gt-sc20 2光口8电口网络交换机。
102.如图1至图12所示,进一步地,遥控座椅15包括:本体52、第二控制器49、遥控手柄和按键54、刹车45、油门46、显示屏48,第二控制器49安装在本体52中,遥控手柄和按键54以及显示屏48均安装在本体52上,刹车45和油门46转动安装在本体52的底部,遥控手柄和按键54、刹车45、油门46、显示屏48均与第二控制器49连接,第二控制器49与网络控制系统20连接。
103.采用上述进一步技术方案的有益效果是:实现视频信号实时采集和显示,显示车辆可行驶区域。控制和显示车辆实时信息,通过遥控方式对铲运机刹车、油门、行走、转向及铲斗进行遥控,铲运机司机遥控铲运机进入采矿区、危险区及眉线内铲矿出矿,司机在外部相对安全舒适的遥控座椅上操控,铲运机行驶到安全区后,根据司机自己操控需求,可遥控操作也可以上车驾驶操控运矿和出矿。通过遥控座椅实现对整个车辆的操控、查看视频及设备状态信息。
104.通过遥控座椅显示屏实时显示,司机实时掌握车辆前、后、左、右信息,实现人机交互功能,保证司机精准的控制车辆。
105.其中,第二控制器的型号可以为spc-sfmc-x2214a,控制器中可以设置有可编程控制器(第二控制器)、工控机及软件、网络通讯设备及输入设备,工控机的型号可以为mic-770。
106.遥控座椅通过tcp/ip与网络交换机进行通讯,网络交换机(简称交换机)通过光纤与另外两台或多台交换机进行通讯,交换机与5g无线ap基站通过cat6进行一对一连接,通过ap基站覆盖车辆行驶区段,保证车载无线与控制设备及遥控座椅间实现良好通讯。
107.控制箱内可编程控制器经can总线模块,发送车辆运行和报警信号,信号由客户端天线经ap基站、网络控制箱,最终传送给远程驾驶座椅(遥控座椅),在工控机上对报警和设备状态信息进行文字显示和语音播报,提醒司机注意。
108.增加5.8g工业级无线ap基站,无线网络采用高带宽、低延时的漫游wifi网络,无线ap基站布置在车辆通行路线上及危险区域附近,通过无线基站,实现遥控座椅驾驶端与车辆之间信号传输,保证司机遥控信号实时传送给车辆接收,车辆根据遥控座椅手柄端操作车辆启停、左右转、油门及档位等各个指令。指令输入到座椅端的可编程控制器(第二控制器),控制器接收到指令通过网络传送给布置在车辆行驶区域的无线ap基站,然后发送给车
载客户端天线,天线把接收信号发送给车载端新增的可编程控制器,通过继电器和车体上电液阀,车辆完成铲矿、行走和卸矿各种功能。同时通过车载端视频接收装置、无线ap基站接收车辆视频信息,通过遥控座椅显示屏实时显示,司机实时掌握车辆前、后、左、右信息,实现人机交互,保证司机对铲运机的安全驾驶。
109.实施例一
110.遥控座椅:布置在相对宽敞环境相对好的值班硐室内,从遥控座椅敷设一路电源及网络cat6(超六类网线)到网络交换机控制箱体,实现遥控座椅与网络交换机之间的通讯,此段距离一般较短,网络交换机箱体直接固定在方便施工的墙体上,线缆长度根据实际情况而定一般不超过30米。
111.从交换机箱体敷设一路光纤,光纤根据现场实际安装位置及出矿路径进行敷设,光纤的敷设保证高度不低于井下过往车辆高度为准,防止车辆剐蹭损坏。此处如果距离不超过60米可以使用网线敷设,如果距离超过80米使用光纤效果较好。
112.根据实际车辆行进轨迹布置另外一个、二个或多个交换机及无线ap基站(根据车辆遥控行程路线确定,一般一个基站直线可以覆盖80-110米的距离,如果井下路段有转弯或转角,需要在转弯或转角处增加无线基站,同时在基站旁边安装交换机),交换机通讯可以与维修硐室进行敷设光缆通讯亦或与临近的交换机进行敷设通讯,前提是保证通讯可靠和避免其它信号对此通讯造成干扰,同时需要防止过往车辆的剐蹭及爆破等对其可能形成的不不利影响。
113.根据交换机、无线ap电源需求,从现场选取电源,从临近配电室(或现场配电柜)选取ac220v电源,为无线ap基站配置网络及电源。
114.为各个ap基站及通讯系统设置网络通讯ip地址,保证本段系统各个节点按照tcp/ip协议进行通讯。
115.调节各个基站之间切换时间,设置好传输控制协议、通过软件监测信号接收的强度值,对基站的接收方向进行合理调试,保证在此位置接收信号强度最好,保证相邻基站信号相差在5~10个db左右。
116.使用视距内遥控器对铲运机进行遥控,一般在距离车辆30米内并且视距可见范围内进行遥控操作,操作时须先保证自身所处环境安全再进行遥控操作。
117.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1