1.本实用新型涉及水泥搅拌桩机领域,更具体地,涉及一种搅拌桩空桩智能喷浆控制装置。
背景技术:2.深层搅拌桩机是进行软弱地基处理的新型机具。它运用浆体喷射或粉体喷射搅拌法原理,向软土地基土壤中喷射水泥浆体或水泥干粉、石灰粉等体固化剂并加以搅拌,使之成桩的方式来加固软弱地基基础。
3.水泥搅拌装工艺的流程为“四搅四喷”:场地平整、测量放线及复核;深层搅拌机就位;制备水泥浆、送浆;喷浆搅拌下沉;喷浆搅拌提升;重复喷浆搅拌下沉;重复喷浆搅拌提升孔口;关闭搅拌机、清洗叶片;装机移位;施工下一根桩。
4.在软弱地层施工基坑,为减少围护桩嵌固深度及保证围护结构稳定性,设计常采用在坑内坑底紧靠围护桩设置格栅式被动加固区,坑底以上为空桩后期随土方挖除。由于空桩不属于实体工程,不需要水泥掺入,但目前常规工艺无法有效控制在施工空桩时停止水泥浆输送(堵管),所以在施工空桩与移机换桩位时,为了避免堵塞管道送浆过程不能停止,出浆口仍然源源不断的送浆,导致水泥浆造成浪费。
5.针对以上弊端,如果在施工搅拌桩空桩时,使用清水代替水泥浆,与实桩之间可自由切换水与水泥浆施工,对于降低施工成本,具有极大的意义。
6.其中所述的搅拌桩机主要由底架、井架和导向加压机构、钻机传动系统、钻具、液压系统、注浆系统、电气系统等部分组成,底架用于安装井架和导向加压机构、钻机传动系统、钻具、液压系统、电气系统;井架用于安装钻机传动系统,所述钻机传动系统包括主动轴、天梁轴、上下链轮,所述主动轴安装在井架下部,天梁轴安装在井架顶部,所述主动轴和天梁轴的两侧均设有齿轮,所述主动轴的齿轮和天梁轴的齿轮通过双排链条传动连接,所述钻具安装在双排链条上,通过电气系统以双排链条向主轴输入动力,主动轴通过双排链条带动天梁轴转动,实现钻具的上下升降;所述钻具包括钻杆及钻杆接头、钻头,所述钻杆内部设有密封通道,所述钻杆输出端以专制钻杆接头与钻头连接;所述注浆系统包括注浆泵、搅拌桶、注浆管和水龙头,所述搅拌桶通过注浆管和注浆泵连接,所述注浆泵通过注浆管与水龙头连接,所述水龙头连接钻杆的输入端。
技术实现要素:7.本实用新型为克服上述现有技术所述施工搅拌桩空桩时,水泥浆浪费的缺陷,提供一种搅拌桩空桩智能喷浆控制装置。
8.为解决上述技术问题,本实用新型的技术方案如下:
9.一种搅拌桩空桩智能喷浆控制装置,包括搅拌桩机,所述搅拌桩机包括钻机传动系统、钻具和注浆泵,所述注浆泵通过注浆管连接钻具的输入端,所述钻机传动系统用于带动钻具进行上下移动,所述钻机传动系统包括主动轴,所述控制装置包括感应模块、三通电
磁阀和控制模块,用于搅拌桩机施工时通过控制装置控制实现水与水泥浆之间的自动切换;所述感应模块通过记录主动轴转动圈数,所述感应模块包括角度传感器,所述角度传感器设置于主动轴的端面;所述三通电磁阀包括第一输入接口、第二输入接口和输出接口,所述第一输入接口通过管道连接注浆泵,第二输入接口通过管道连接有清水泵,所述输出接口通过管道连接钻具;所述控制模块用于收集角度传感器的计量数据和自动控制三通电磁阀,所述控制模块与角度传感器和三通电磁阀通信连接。
10.通过上述技术方案设计,所述角度传感器用于记录搅拌桩转动轴旋转角度,并实时传输至控制模块;例如在某一具体方案中,主动轴转动一圈为360
°
,可换算成钻具下移深度0.46m;角度传感器最多可记录和储存主动轴转动60圈的数据,即可记录钻具下移深度27.6m;并实时传输至控制模块;控制模块所记录的实时角度数据,即施工实时的钻具下移深度,可在0-27.6m间任意深度设置报警值。
11.使用三通电磁阀作为分水阀,三通分水阀一通输出接口为常开口,另外两通第一输入接口和第二输入接口可交替开关,达到分流的目的
12.在达到警报值后,控制模块会持续发送开关信号给电磁阀,以保证信号正常接收;三通电磁阀接收到控制模块的开关信号后,自动控制第一输入接口和第二输入接口开合,来控制输出接口输出水泥浆或者水,从而实现施工空桩与移机换桩位时,将第一输入接口关闭,接通第二输入接口,输出清水,避免水泥浆不断出浆而造成的浪费,从而降低施工成本。
13.进一步地,所述感应模块还包括辅助计量装置,所述辅助计量装置一端与主动轴传动连接,另一端安装角度传感器。
14.更进一步地,所述辅助计量装置包括第一圆盘,所述第一圆盘与主动轴的端面卡接。
15.更进一步地,所述主动轴一侧垂直设有钢筋,所述第一圆盘设有安装槽,所述安装槽连接第一圆盘的圆心和圆周,所述第一圆盘一侧的圆心处垂直设有管套,所述主动轴穿过管道,钢筋与安装槽卡接。
16.更进一步地,所述角度传感器一端连接有旋转杆,所述旋转杆插入管套,所述旋转杆通过有螺丝与管套固定。
17.更进一步地,所述辅助计量装置还包括第二圆盘,所述第二圆盘与主动轴处的钻机传动系统外壁固定,所述旋转杆穿过第二圆盘的圆心与管套固定。
18.更进一步地,所述第二圆盘的直径大于第一圆盘的直径。
19.通过上述技术方案设计,需要先将钻机传动系统的主动轴所在位置的安装盖拆下,并在主动轴上焊接上钢筋;然后将第一圆盘的管套穿过主动轴的一端,将第一圆盘的安装槽与主动轴上垂直焊接的钢筋卡接固定后,在将旋转杆穿过第二圆盘的圆心并与插入管套内,使用螺丝垂直插入管套将旋转杆和管套相固定;在将第二圆盘固定在钻机传动系统的外壁上,代替原本的安装盖,防止异物飞入。主动轴转动带动第一圆盘的管套转动,再通过带动旋转杆转动,角度感应器感应转动圈数。
20.更进一步地,所述钢筋宽度为5~10mm,长度为70~100mm。
21.根据上述技术方案设计,钢筋适用于不同的机型的主动轴。
22.进一步地,所述控制模块包括继电器和遥控组件,所述继电器与三通电磁阀电连
接,所述遥控组件与继电器通过导线连接。
23.更进一步地,所述控制模块还包括工控仪表,所述工控仪表与角度传感器通过导线连接,所述工控仪表与遥控组件通信连接。
24.通过上述技术方案设计,继电器、遥控组件和工控仪表均为现有技术,可根据需求进行采购。角度传感器最多可记录和储存主动轴转动圈数的数据,即可记录钻具下移深度的数据;并实时传输至工控仪表;在工控仪表所记录的实时角度数据中,即施工实时的钻具下移深度,可在0-27.6m间任意深度设置报警值。在达到警报数值之后,工控仪表传送信号给遥控组件,遥控组件会持续发送开关信号给三通电磁阀,保证信号正常接收。三通电磁阀在接收到开关信号后,自动控制三通电磁阀对水泥浆和水的切换输出。
25.与现有技术相比,本实用新型技术方案的有益效果是:
26.一种搅拌桩空桩智能喷浆控制装置,包括搅拌桩机,所述搅拌桩机包括钻机传动系统、钻具和注浆泵,所述注浆泵通过注浆管连接钻具的输入端,所述钻机传动系统用于带动钻具进行上下移动,所述钻机传动系统包括主动轴,所述控制装置包括感应模块、三通电磁阀和控制模块,用于搅拌桩机施工时通过控制装置控制实现水与水泥浆之间的自动切换;所述感应模块通过记录主动轴转动圈数,所述感应模块包括角度传感器,所述角度传感器设置于主动轴的端面;所述三通电磁阀包括第一输入接口、第二输入接口和输出接口,所述第一输入接口通过管道连接注浆泵,第二输入接口通过管道连接有清水泵,所述输出接口通过管道连接钻具;所述控制模块用于收集角度传感器的计量数据和自动控制三通电磁阀,所述控制模块与角度传感器和三通电磁阀通信连接。
27.通过设置感应模块、三通电磁阀和控制模块,在搭配三通电磁阀的基础上,在搅拌桩机的主动轴上安装角度传感器,由角度传感器通过监测主动轴的转动圈数,控制模块传输信号控制三通电磁阀智能切换水泥浆或清水进行施工,减少人为误差,实现对施工过程中浆水切换的智能化管理。
附图说明
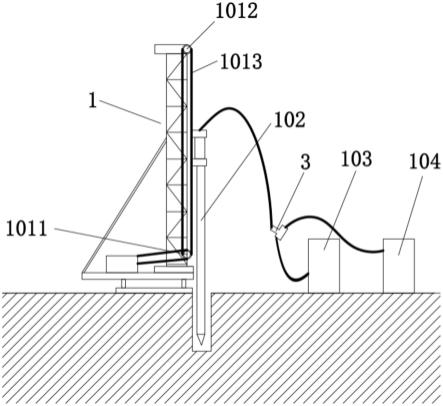
28.图1为搅拌桩机的结构示意图。
29.图2为搅拌桩机主动轴部分的结构示意图。
30.图3为辅助计量装置与主动轴的连接示意图。
31.图4为安装控制装置的搅拌桩机的结构示意图。
32.其中:1、搅拌桩机;101、钻机传动系统;1011、主动轴;1012、天梁轴; 1013、链条;1014、钢筋;102、钻具;103、注浆泵;104、清水泵;
33.2、感应模块;201、角度传感器;202、辅助计量装置;2021、第一圆盘; 2022、安装槽;2023、管套;2024、第二圆盘;2025、旋转杆;2026、螺丝;
34.3、三通电磁阀;
35.4、控制模块;401、工控仪表。
具体实施方式
36.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例的附图,对本技术的技术方案进行清楚、完整地描述。显然,所描述的实施例是本技术的一
部分实施例,而不是全部的实施例。基于所描述的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
37.除非另外定义,本技术使用的技术术语或者科学术语应当为本技术所属领域内具有一般技能的人士所理解的通常意义。本技术中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
38.实施例1
39.如图1~图2所示,本实施例公开一种搅拌桩空桩智能喷浆控制装置,包括搅拌桩机1,搅拌桩机1包括钻机传动系统101、钻具102和注浆泵103,注浆泵103通过注浆管连接钻具102的输入端,钻机传动系统101用于带动钻具102 进行上下移动,钻机传动系统101包括主动轴1011,控制装置包括感应模块2、三通电磁阀3和控制模块4,用于搅拌桩机1施工时通过控制装置控制实现水与水泥浆之间的自动切换;感应模块2通过记录主动轴1011转动圈数,感应模块 2包括角度传感器201,角度传感器201设置于主动轴1011的端面;三通电磁阀 3包括第一输入接口、第二输入接口和输出接口,第一输入接口通过管道连接注浆泵103,第二输入接口通过管道连接有清水泵104,输出接口通过管道连接钻具102;控制模块4用于收集角度传感器201的计量数据和自动控制三通电磁阀 3,控制模块4与角度传感器201和三通电磁阀3通信连接。
40.在具体实施过程中,角度传感器201用于记录搅拌桩转动轴旋转角度,主动轴1011转动一圈为360
°
,可换算成钻具102下移深度0.46m;角度传感器201 最多可记录和储存主动轴1011转动60圈的数据,即可记录钻具102下移深度 27.6m;并实时传输至控制模块4;控制模块4所记录的实时角度数据,即施工实时的钻具102下移深度,可在0-27.6m间任意深度设置报警值。
41.使用三通电磁阀3作为分水阀,三通分水阀一通输出接口为常开口,另外两通第一输入接口和第二输入接口可交替开关,达到分流的目的
42.在达到警报值后,控制模块4会持续发送开关信号给电磁阀,以保证信号正常接收;三通电磁阀3接收到控制模块4的开关信号后,自动控制第一输入接口和第二输入接口开合,来控制输出接口输出水泥浆或者水,从而实现施工空桩与移机换桩位时,将第一输入接口关闭,接通第二输入接口,输出清水,避免水泥浆不断出浆而造成的浪费,从而降低施工成本。
43.实施例2
44.如图1~图2所示,本实施例在实施例1的基础上,增加了工控仪表401、继电器和遥控组件,并公开一种搅拌桩空桩智能喷浆控制装置,包括搅拌桩机1,搅拌桩机1包括钻机传动系统101、钻具102和注浆泵103,注浆泵103通过注浆管连接钻具102的输入端,钻机传动系统101用于带动钻具102进行上下移动,钻机传动系统101包括主动轴1011,控制装置包括感应模块2、三通电磁阀3 和控制模块4,用于搅拌桩机1施工时通过控制装置控制实现水与
水泥浆之间的自动切换;感应模块2通过记录主动轴1011转动圈数,感应模块2包括角度传感器201,角度传感器201设置于主动轴1011的端面;三通电磁阀3包括第一输入接口、第二输入接口和输出接口,第一输入接口通过管道连接注浆泵103,第二输入接口通过管道连接有清水泵104,输出接口通过管道连接钻具102;控制模块4用于收集角度传感器201的计量数据和自动控制三通电磁阀3,控制模块4与角度传感器201和三通电磁阀3通信连接。
45.在具体实施过程中,控制模块4包括继电器和遥控组件,继电器与三通电磁阀3电连接,遥控组件与继电器通过导线连接。控制模块4还包括工控仪表401,工控仪表401与角度传感器201通过导线连接,工控仪表401与遥控组件通信连接。
46.在本实施例的具体实施过程中,角度传感器201最多可记录和储存主动轴 1011转动圈数的数据,即可记录钻具102下移深度的数据;并实时传输至工控仪表401;在工控仪表401所记录的实时角度数据中,即施工实时的钻具102下移深度,可在0-27.6m间任意深度设置报警值。在达到警报数值之后,工控仪表401传送信号给遥控组件,遥控组件会持续发送开关信号给三通电磁阀3,保证信号正常接收。三通电磁阀3在接收到开关信号后,自动控制三通电磁阀3对水泥浆和水的切换输出。
47.实施例3
48.如图1~图4所示,本实施例在实施例2的基础上,增加了辅助计量装置202,并公开了一种搅拌桩空桩智能喷浆控制装置,包括搅拌桩机1,搅拌桩机1包括钻机传动系统101、钻具102和注浆泵103,注浆泵103通过注浆管连接钻具102 的输入端,钻机传动系统101用于带动钻具102进行上下移动,钻机传动系统 101包括主动轴1011,控制装置包括感应模块2、三通电磁阀3和控制模块4,用于搅拌桩机1施工时通过控制装置控制实现水与水泥浆之间的自动切换;感应模块2通过记录主动轴1011转动圈数,感应模块2包括角度传感器201,角度传感器201设置于主动轴1011的端面;三通电磁阀3包括第一输入接口、第二输入接口和输出接口,第一输入接口通过管道连接注浆泵103,第二输入接口通过管道连接有清水泵104,输出接口通过管道连接钻具102;控制模块4用于收集角度传感器201的计量数据和自动控制三通电磁阀3,控制模块4与角度传感器201和三通电磁阀3通信连接。
49.在具体实施过程中,感应模块2还包括辅助计量装置202,辅助计量装置202 一端与主动轴1011传动连接,另一端安装角度传感器201。
50.如图3所示,辅助计量装置202包括第一圆盘2021,第一圆盘2021与主动轴1011的端面卡接。主动轴1011一侧垂直设有钢筋1014,第一圆盘2021设有安装槽2022,安装槽2022连接第一圆盘2021的圆心和圆周,第一圆盘2021一侧的圆心处垂直设有管套2023,主动轴1011穿过管道,钢筋1014与安装槽2022 卡接。角度传感器201一端连接有旋转杆2025,旋转杆2025插入管套2023,旋转杆2025通过有螺丝2026与管套2023固定。辅助计量装置202还包括第二圆盘2024,第二圆盘2024与主动轴1011处的钻机传动系统101外壁固定,旋转杆2025穿过第二圆盘2024的圆心与管套2023固定。第二圆盘2024的直径大于第一圆盘2021的直径。
51.其中钢筋1014宽度为5~10mm,长度为70~100mm。
52.控制模块4包括继电器和遥控组件,继电器与三通电磁阀3电连接,遥控组件与继电器通过导线连接。控制模块4还包括工控仪表401,工控仪表401与角度传感器201通过导线连接,工控仪表401与遥控组件通信连接。
53.在本实施例的具体实施过程中,主动轴1011和天梁轴1012通过齿轮协同带动链条1013运动,从而带动钻具102上下移动,在施工时,主动轴1011带动链条1013从而带动钻具102下沉,在施工位置进行打空桩,可以用过手动遥控三通电磁阀3的输出接口输出水;角度传感器201开始记录主动轴1011的转动数据和钻具102的下移深度,并实时传输至工控仪表401;当空桩施工完毕后,达到警报值后,工控仪表401传送信号给遥控组件,遥控组件会持续发送开关信号给三通电磁阀3,三通电磁阀3在接收到开关信号后,自动控制三通电磁阀3将水切换成水泥浆,钻具102继续下沉进行打实桩。
54.在将辅助计量装置202与主动轴1011安装完毕后,通过搅拌桩机1钻头停留在地面空转,使用手动操控遥控组件对三通电磁阀3进行水泥浆、水的切换,观察喷嘴喷射出的液体,水泥浆与水切换正常后进行原位施工。施工到预定打桩位置切换电磁阀,观察后台清水池及泥浆池的液位变化情况,即可了解施工是否正常。
55.从而实现施工空桩与移机换桩位时,遥控三通电磁阀3搭配感应模块2和控制模块4,智能切换水泥浆和水进行施工,避免水泥浆不断出浆而造成的浪费,从而降低施工成本。
56.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。