可偏转动臂及工程机械的制作方法
1.本实用新型涉及工程机械技术领域,具体涉及一种可偏转动臂及工程机械。
背景技术:
2.液压挖掘机作为工程机械中的主要机种,在各行各业中都扮演着非常重要的角色,并被广泛应用于各种大型工程和基础建设中。近几年小型挖掘机常用在农田和隧道排水沟渠等作业场景中,在作业过程中,挖掘机通常位于沟渠的侧边,挖掘机履带沿着沟渠边行走,挖掘机底盘始终在沟渠侧边,动臂需要带动斗杆和铲斗转向车体外侧,以对车体侧边的区域进行作业。但是,在动臂带动斗杆和铲斗转向车体外侧时,动臂前端随着动臂的转动而转动,不能保持原来的方向,从而与动臂前端相连的铲斗的挖掘方向不能保持与挖掘机的行走方向平行,因此往往使挖出来的沟渠倾斜不平,因此需要设计一种铲斗的挖掘方向不会随着动臂的偏转而发生改变的挖掘机。
技术实现要素:
3.因此,本实用新型要解决的技术问题在于克服现有技术中的动臂前端随着动臂的转动而偏转朝向的缺陷,从而提供一种动臂前端的朝向不随动臂的转动而偏转的可偏转动臂及工程机械。
4.为了解决上述问题,本实用新型提供了施例提供一种可偏转动臂,包括:动臂本体;连接头,与动臂本体间隔设置;偏转臂、连杆及驱动部,均设置在动臂本体与连接头之间,连杆与偏转臂相平行,偏转臂的一端与动臂本体转动连接且另一端与连接头转动连接,连杆的一端与动臂本体转动连接且另一端与连接头转动连接,驱动部与偏转臂转动连接且与连接头转动连接,以驱动偏转臂相对于动臂本体偏转。
5.可选的,动臂本体具有沿竖直方向的第一端面,连接头具有沿竖直方向的第二端面,第一端面与第二端面相对设置且相平行,偏转臂的一端与第一端面相铰接且另一端与第二端面相铰接,连杆的一端与第一端面相铰接且另一端与第二端面相铰接,偏转臂的转动轴线、连杆的转动轴线及驱动部的两端的转动轴线均沿竖直方向,偏转臂偏转过程中,第一端面和第二端面保持平行。
6.可选的,偏转臂的一端与动臂本体铰接的铰接点为第一铰点,偏转臂的另一端与连接头铰接的铰接点为第二铰点;连杆的一端与动臂本体铰接的铰接点为第三铰点且另一端与连接头铰接的铰接点为第四铰点,第一铰点、第二铰点、第三铰点及第四铰点的连线构成平行四边形;驱动部的一端与第二端面铰接的铰接点为第五铰点且另一端与偏转臂铰接的铰接点为第六铰点,第五铰点位于第四铰点的上方。
7.可选的,第一铰点的数量为两个且上下设置,第一端面上设有第一上铰接座和第一下铰接座,第一上铰接座与偏转臂的一端通过第一上铰接轴连接,第一下铰接座与偏转臂的一端通过第一下铰接轴连接,第一下铰接座与连杆的一端通过第二下铰接轴连接,第一上铰接轴和第一下铰接轴同轴设置,第一下铰接轴与第二下铰接轴平行设置。
8.可选的,第一上铰接座和第一下铰接座与动臂本体焊接或一体成型。
9.可选的,第二铰点的数量为两个且上下设置,第二端面上设有第二上铰接座和第二下铰接座,第二上铰接座与偏转臂的另一端通过第二上铰接轴连接,第二上铰接座与驱动部的一端通过第三上铰接轴连接,第二下铰接座与偏转臂的另一端通过第三下铰接轴连接,连杆的另一端通过第四下铰接轴连接,第二上铰接轴与第三下铰接轴同轴设置,第三上铰接轴与第四下铰接轴同轴设置,第二上铰接轴与第三上铰接轴平行设置。
10.可选的,第二上铰接座和第二下铰接座与连接头焊接或一体成型。
11.可选的,偏转臂的一端上设有第三上铰接座,第三上铰接座与驱动部的另一端通过第四上铰接轴连接。
12.可选的,驱动部为伸缩缸,伸缩缸的伸缩驱动偏转臂偏转,在伸缩缸伸长时,偏转臂朝向设置有伸缩缸的一侧偏转;且在伸缩缸缩短时,偏转臂朝向远离伸缩缸的一侧偏转。
13.本实用新型还提供一种工程机械,其包括:上述的可偏转动臂。
14.本实用新型具有以下优点:
15.通过设置偏转臂、连杆及驱动部均设置在动臂本体与连接头之间,偏转臂、连杆、动臂本体及连接头构成四连杆机构,驱动部的一端与偏转臂转动连接且另一端与连接头转动连接,通过驱动部驱动偏转臂相对于动臂本体偏转,实现偏转臂带动连接头偏移,进一步地,连接在动臂本体和连接头之间的偏转臂及连杆的长度不变,在四连杆机构的作用下,动臂本体和连接头相对的两个面始终保持平行,动臂本体保持不动,从而保持连接头的偏移为平行移动,即连接在动臂前端的连接头的朝向始终不变,保证在连接头上安装的铲斗的挖掘方向始终保持一致,防止挖出来的沟渠不平的情况出现;并且,偏转臂、连杆及驱动部均设置在动臂本体与连接头之间,一方面使得外观整洁、美观性好,另一方面,偏转臂、连杆及驱动部可以直接与动臂本体、连接头的本体部分连接,强度高、稳定性好,有利于延长使用寿命。
附图说明
16.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
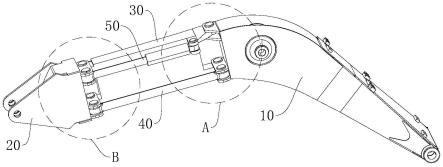
17.图1示出了本实用新型实施例的可偏转动臂的结构示意图;
18.图2示出了图1中的可偏转动臂的a部分的局部放大示意图;
19.图3示出了图1中的可偏转动臂的b部分的局部放大示意图;
20.图4示出了本实用新型实施例的可偏转动臂未偏转状态时的俯视示意图;
21.图5示出了本实用新型实施例的可偏转动臂在伸缩缸伸长状态时的俯视示意图;
22.图6示出了本实用新型实施例的可偏转动臂在伸缩缸缩短时的俯视示意图;
23.图7示出了本实用新型实施例的可偏转动臂分别在未偏转状态及伸缩缸缩短状态时的原理图。
24.附图标记说明:
25.10、动臂本体;20、连接头;30、偏转臂;40、连杆;50、驱动部;61、第一铰点;62、第二
铰点;63、第三铰点;64、第四铰点;65、第五铰点;66、第六铰点;71、第一上铰接座;72、第二上铰接座;73、第三上铰接座;81、第一下铰接座;82、第二下铰接座。
具体实施方式
26.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
28.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
29.此外,下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
30.如图1至图7所示,本实施例提供一种可偏转动臂,包括:动臂本体10、连接头20、偏转臂30、连杆40及驱动部50,连接头20与动臂本体10间隔设置;偏转臂30、连杆40及驱动部50均设置在动臂本体10与连接头20之间,连杆40与偏转臂30相平行,偏转臂30的一端与动臂本体10转动连接且另一端与连接头20转动连接,连杆40的一端与动臂本体10转动连接且另一端与连接头20转动连接,驱动部50与偏转臂30转动连接且与连接头20转动连接,以驱动偏转臂30相对于动臂本体10偏转。其中,偏转臂30、连杆40、动臂本体10及连接头20构成四连杆机构。
31.应用本实施例的可偏转动臂,通过设置偏转臂30、连杆40及驱动部50均设置在动臂本体10与连接头20之间,偏转臂30、连杆40、动臂本体10及连接头20构成四连杆机构,驱动部50的一端与偏转臂30转动连接且另一端与连接头20转动连接,通过驱动部50驱动偏转臂30相对于动臂本体10偏转,实现偏转臂30带动连接头20偏移,进一步地,连接在动臂本体10和连接头20之间的偏转臂30及连杆40的长度不变,在四连杆机构的作用下,动臂本体10和连接头20相对的两个面始终保持平行,动臂本体10保持不动,从而保持连接头20的偏移为平行移动,即连接在动臂前端的连接头20的朝向始终不变,保证在连接头20上安装的铲斗的挖掘方向始终保持一致,防止挖出来的沟渠不平的情况出现;并且,偏转臂30、连杆40及驱动部50均设置在动臂本体10与连接头20之间,一方面使得外观整洁、美观性好,另一方面,偏转臂30、连杆40及驱动部50可以直接与动臂本体10、连接头20的本体部分连接,强度高、稳定性好,有利于延长使用寿命。
32.需要说明的是,动臂本体10固定连接在工程机械上,保持不动;偏转臂30相对于动
臂本体10偏转指的是偏转臂30在水平面内的偏转,以带动偏转臂30前端的连接头20偏移,以使安装在连接头20上的斗杆及铲斗偏移至工程机械的侧面,从而便于施工,其中,前端指的是偏转臂30上远离动臂本体10的一端。偏转臂30、连杆40及驱动部50均设置在动臂本体10与连接头20之间设置有罩壳,偏转臂30、连杆40及驱动部50均位于罩壳内,整体美观性好。
33.在本实施例中,动臂本体10具有沿竖直方向的第一端面,连接头20具有沿竖直方向的第二端面,第一端面与第二端面相对设置且相平行,偏转臂30的一端与第一端面相铰接且另一端与第二端面相铰接,连杆40的一端与第一端面相铰接且另一端与第二端面相铰接,偏转臂30的转动轴线、连杆40的转动轴线及驱动部50的两端的转动轴线均沿竖直方向,偏转臂30偏转过程中,第一端面和第二端面保持平行,从而保证连接头20的朝向不变。第一端面为动臂本体10的本体部分,第二端面为连接头20的本体部分,因此偏转臂30、连杆40都是直接与动臂本体10及连接头20的本体部分连接,本体部分强度高、可靠性好,可以有效避免偏转臂30或连杆40因与动臂本体10的侧板或连接头20的侧板直接连接而造成的连接强度低、易损坏的问题,从而有效延长使用寿命、提高安全性。其中,竖直方向指的是垂直于水平面的方向,第一端面与第二端面均沿竖直方向设置,位于第一端面和第二端面之间的偏转臂30沿水平方向,因此偏转臂30偏转过程中在水平面内发生偏转。
34.在本实施例中,偏转臂30的一端与动臂本体10铰接的铰接点为第一铰点61,偏转臂30的另一端与连接头20铰接的铰接点为第二铰点62;连杆40的一端与动臂本体10铰接的铰接点为第三铰点63且另一端与连接头20铰接的铰接点为第四铰点64,如图7所示,第一铰点61、第二铰点62、第三铰点63及第四铰点64的连线构成平行四边形,第一铰点61与第三铰点63的连线构成第一连线,第二铰点62与第四铰点64的连线构成第二连线,第一连线与第二连线始终互相平行,第一连线为第一端面上的一条线,因而可知第二端面与第一端面始终互相平行,即实现了连接头20的朝向不发生偏转;驱动部50的一端与第二端面铰接的铰接点为第五铰点65且另一端与偏转臂30铰接的铰接点为第六铰点66,第五铰点65位于第四铰点64的上方,驱动部50通过驱动第五铰点65与第六铰点66之间的距离的改变,实现推动或拉动连接头20,又由于连接头20的第二表面与动臂本体10的第一表面始终保持平行,故而通过偏转臂30的偏转来实现,同时连杆40与偏转臂30始终保持平行,连杆40随着偏转臂30的偏转而偏转。
35.在本实施例中,第一铰点61的数量为两个且上下设置,第一端面上设有第一上铰接座71和第一下铰接座81,第一上铰接座71与偏转臂30的一端通过第一上铰接轴连接,第一下铰接座81与偏转臂30的一端通过第一下铰接轴连接,第一下铰接座81与连杆40的一端通过第二下铰接轴连接,第一上铰接轴和第一下铰接轴同轴设置,第一下铰接轴与第二下铰接轴平行设置。通过设置第一铰点61的数量为两个且上下设置,一方面增加了偏转臂30沿竖直方向的尺寸,从而增加结构的强度,另一方面,上下两个第一铰点61可以避免设置一个第一铰点而带来的铰接轴的长度过长的问题,节省材料的同时也保证了连接强度及稳定性;第一上铰接座71和第一下铰接座81设置在第一端面上,实现了偏转臂30通过第一上铰接座71与动臂本体10的本体的连接、连杆40通过第一下铰接座81与动臂本体10的本体的连接,从而保证了连接强度,增大了工程机械的承载能力。
36.在本实施例中,第一上铰接座71和第一下铰接座81与动臂本体10焊接,焊接的方
式应用广泛,技术成熟,成本低且连接牢固。可以理解,作为可替换的实施方式,第一上铰接座71和第一下铰接座81与动臂本体10的连接一体成型,一体成型的方式保证了第一上铰接座71和第一下铰接座81不会与动臂本体10分离,保证了结构的连接强度,有效避免因载荷过大造成偏转臂30与动臂本体10分离而损坏的现象。
37.在本实施例中,第二铰点62的数量为两个且上下设置,第二端面上设有第二上铰接座72和第二下铰接座82,第二上铰接座72与偏转臂30的另一端通过第二上铰接轴连接,第二上铰接座72与驱动部50的一端通过第三上铰接轴连接,第二下铰接座82与偏转臂30的另一端通过第三下铰接轴连接,连杆40的另一端通过第四下铰接轴连接,第二上铰接轴与第三下铰接轴同轴设置,第三上铰接轴与第四下铰接轴同轴设置,第二上铰接轴与第三上铰接轴平行设置。第二上铰接座72和第二下铰接座82设置在第二端面上,实现了偏转臂30通过第二上铰接座72与连接头20的本体的连接、连杆40通过第二下铰接座82与连接头20的本体的连接,从而保证了连接强度,增大了工程机械的承载能力。其中,偏转臂30的另一端指的是偏转臂30上远离动臂本体10的一端;连杆40的另一端指的是连杆40上远离动臂本体10的一端。
38.在本实施例中,第二上铰接座72和第二下铰接座82与连接头20焊接,焊接的方式应用广泛,技术成熟,成本低且连接牢固。可以理解,作为可替换的实施方式,第二上铰接座72和第二下铰接座82与连接头20一体成型,一体成型的方式保证了第二上铰接座72和第二下铰接座82不会与连接头20分离,保证了结构的连接强度,有效避免因载荷过大造成偏转臂30与连接头20分离而损坏的现象。
39.在本实施例中,偏转臂30的一端上设有第三上铰接座73,第三上铰接座73与驱动部50的另一端通过第四上铰接轴连接,从而实现驱动部50与偏转臂30的转动连接。其中,偏转臂30的一端指的是偏转臂30远离连接头20的一端;驱动部50的另一端指的是驱动部50远离连接头20的一端。
40.在本实施例中,第三上铰接座73与偏转臂30焊接,焊接的方式应用广泛,技术成熟,成本低且连接牢固。可以理解,作为可替换的实施方式,第三上铰接座73与偏转臂30一体成型,一体成型的方式结构稳定性高,保证了结构的连接强度。
41.在本实施例中,驱动部50为伸缩缸,伸缩缸的伸缩驱动偏转臂30偏转。在伸缩缸处于原始状态,未进行伸长或缩短时,如图4所示,可偏转动臂处于未偏转状态;在伸缩缸伸长时,如图5所示,偏转臂30朝向设置有伸缩缸的一侧偏转;在伸缩缸缩短时,如图6所示,偏转臂30朝向远离伸缩缸的一侧偏转。通过伸缩缸在不同状态之间的转换,同时在四连杆机构的作用下,驱动部50的两端分别绕第五铰点65、第六铰点66转动,使得驱动部50与第一表面之间的夹角、驱动部50与第二表面之间的夹角改变,从而驱动并适应连接头20与动臂本体10之间的位置的变化,实现偏转臂30的偏转,操作简单、灵活性高且稳定性好。
42.优选地,伸缩缸为伸缩油缸或伸缩气缸,油缸或气缸都较为常见,驱动力好且可靠性高。
43.本实用新型还提供一种工程机械,其包括:上述的可偏转动臂。
44.在本实施例中,工程机械还包括斗杆和铲斗,所述斗杆的一端与连接头20转动连接,斗杆的另一端与铲斗转动连接。
45.在本实施例中,工程机械为挖掘机等。当挖掘机在沟渠或轨道边工作时,挖掘机的
履带沿着渠边或者轨道边行走,需要将动臂向车体外侧偏转,采用本实施例的可偏转动臂的结构设计,动臂整体左右转动进行工作时,驱动部50推动偏转臂30偏转,在动臂本体10、偏转臂30、连杆40及连接头20构成的四连杆机构的作用下,连接头20的第二表面保持与动臂本体10的第一本体平行,故斗杆可保持与履带平行方向进行挖掘工作,结构的原理图如图7所示,此设计结构简单、动臂强度较高、功能易实现操作且在实际工作中不需要重复工作就可以完成挖掘工作。
46.从以上的描述中,可以看出,本实用新型的上述的实施例实现了如下技术效果:
47.1、动臂包括动臂本体10及偏转臂30的分段设计,可实现偏转臂30偏转过程中,保证斗杆和铲斗工作时的挖掘方向始终与履带保持平行,并保证挖掘的基坑表面是水平的。
48.2、结构设计简单,强度较高,易于操作。
49.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1