一种城市内河水面漂浮物清理无人船
1.本实用新型涉及城市内河河道垃圾清理技术技术领域,尤其是涉及一种城市内河水面漂浮物清理无人船。
背景技术:
2.目前,城市内河河道垃圾泛滥的问题日益严重,由于城市内河河道往往位于居民区附近,居民区的生活垃圾、水边的旅游垃圾和建筑垃圾等极易进入河道,并漂浮在河面上,影响市容的同时也给城市排水系统带来了挑战,因此清理城市内河水面漂浮物成为城市环境治理的一个重要环节。现如今,对于城市内河河道等小面积水域,水面漂浮物的清理多采用人工打捞,清理效率低的同时,人工成本也较高。为此,我们提出了城市内河水面漂浮物清理的无人船。
技术实现要素:
3.本实用新型的目的是提供一种城市内河水面漂浮物清理无人船,解决城市内河河道等小面积水域,水面漂浮物的清理多采用人工打捞,清理效率低,人工成本高的问题。
4.为实现上述目的,本实用新型提供了一种城市内河水面漂浮物清理无人船,包括无人船本体、设置在所述无人船本体上端的收集箱、设置在所述无人船本体船头一侧的回收框和设置在所述回收框上端的卷扬机;所述无人船本体设置为双体船;所述回收框内部设置有可升降的网板,所述卷扬机一端设置有与所述网板固定安装的钢丝绳;
5.所述回收框底部靠近船头的一侧设置有垃圾进口,所述回收框上端靠近船尾的一侧设置有垃圾出口,所述回收框上端远离所述垃圾出口的一侧设置有助推器,所述助推器包括方板和液压气缸,所述方板设置在所述回收框内部;
6.所述收集箱安装在靠近垃圾出口的一侧,所述收集箱一侧设置有控制装置。
7.优选的,所述回收框的内部两侧安装有导向板,所述网板上方固定安装有u型架,所述导向板安装于所述u型架的两侧,所述钢丝绳的另一端固定在所述u型架上。
8.优选的,所述网板靠近所述导向板的一侧设置有避让孔。
9.优选的,所述收集箱的底部两侧开设有渗水孔。
10.优选的,所述卷扬机的驱动电机为步进电机。
11.优选的,所述液压气缸包括缸体和活塞杆,所述缸体与所述回收框固定,所述活塞杆贯穿所述回收框,所述活塞杆与所述方板固定。
12.优选的,所述方板的长度和宽度小于所述u型架内侧的长度和宽度。
13.优选的,所述控制装置包括上位机系统和下位机系统,所述上位机系统包括上位机软件和电脑pc端,所述下位机系统包括主控制板、驱动模块、gps与无线通信模块和超声模块。
14.因此,本实用新型采用上述结构的一种城市内河水面漂浮物清理无人船,解决城市内河河道等小面积水域,水面漂浮物的清理多采用人工打捞,清理效率低,人工成本高的
问题。
15.有益效果如下:
16.通过设置的网板和收集箱以及助推器,在回收框的上端开设垃圾出口,当网板上堆积大量的垃圾后,网板将垃圾带到垃圾出口的一侧,并通过方板,将垃圾通过垃圾出口推到收集箱内,机械式打捞,清洁效率高,提高该无人船清理效率,同时避免了大量垃圾堆积在水下增加船体阻力,同时又降低了人工成本。
17.下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
附图说明
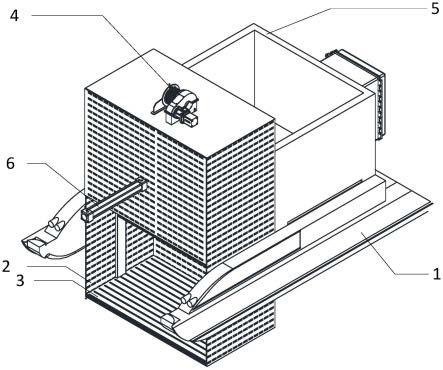
18.图1为本实用新型一种城市内河水面漂浮物清理无人船实施例的结构示意图;
19.图2为本实用新型一种城市内河水面漂浮物清理无人船实施例的侧视图;
20.图3为本实用新型一种城市内河水面漂浮物清理无人船实施例的网板升起后方板推进结构示意图;
21.图4为本实用新型一种城市内河水面漂浮物清理无人船实施例的拆分结构示意图;
22.图5为本实用新型一种城市内河水面漂浮物清理无人船实施例的网板和u型架结构示意图;
23.图6为本实用新型一种城市内河水面漂浮物清理无人船实施例的回收筐与助推器截面结构示意图;
24.图7为本实用新型一种城市内河水面漂浮物清理无人船实施例的无人船本体与收集箱结构示意图;
25.图8为本实用新型一种城市内河水面漂浮物清理无人船实施例的下位机系统框图;
26.图9为本实用新型一种城市内河水面漂浮物清理无人船实施例的下位机控制程序流程图;
27.图10为本实用新型一种城市内河水面漂浮物清理无人船实施例的主控制板避障程序设计流程图。
28.其中:
29.1、无人船本体;11、超声模块;12、控制装置;2、回收框;21、垃圾进口;22、垃圾出口;23、导向板;3、网板;31、u型架;32、避让孔;4、卷扬机;41、钢丝绳;5、收集箱;51、渗水孔;6、助推器;61、方板;62、液压气缸;621、缸体;622、活塞杆。
具体实施方式
30.以下通过附图和实施例对本实用新型的技术方案作进一步说明。
31.除非另外定义,本实用新型使用的技术术语或者科学术语应当为本实用新型所属领域内具有一般技能的人士所理解的通常意义。本实用新型中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并
非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
32.实施例
33.本实用新型提供了一种城市内河水面漂浮物清理无人船,包括无人船本体1、设置在无人船本体上端的收集箱5、设置在无人船本体1船头一侧的回收框2和设置在回收框2上端的卷扬机4,卷扬机4一端设置有与网板3固定安装的钢丝绳41。卷扬机4的驱动电机为步进电机。收集箱5安装在靠近垃圾出口22的一侧,收集箱5远离一侧设置有控制装置。
34.无人船本体1设置为双体船,降低了兴波阻力,减少了船波,有效减少无人船在内河进行清洁工作时船波对内河两岸的冲击与噪声。
35.无人船本体1的船头一侧安装有回收框2。回收框2内部设置有可升降的网板3,回收框2底部靠近船头的一侧设置有垃圾进口21,回收框2上端靠近船尾的有垃圾出口22,回收框2上端远离垃圾出口22的一侧设置有助推器6,助推器6包括设置在回收框2内部的方板61和液压气缸62。在无人船本体1向前行进的过程中,垃圾通过垃圾进口21进入到回收框2的内部设置的可升降的网板3上方。当回收框2内堆积大量的垃圾后,卷扬机4缠绕钢丝绳41,拉动网板3以及网板3上堆积的垃圾向上运动,并运动至垃圾出口22的一侧后,液压气缸62可驱动方板61朝着垃圾出口22的方向推进,在液压气缸62驱动下,使得方板61将网板3上的垃圾通过垃圾出口22推向收集箱5内,随后卷扬机4通过钢丝绳41将网板3放下,方板61收回,可继续对河道漂浮的垃圾进行清理。
36.回收框2的内部两侧安装有导向板23,网板3上方固定安装有u型架31,导向板23安装于u型架31的两侧,钢丝绳41安装在u型架31上,网板3靠近导向板23的一侧设置有避让孔32。避让孔32与导向板23适配,避免网板3在上升过程中与导向板23干涉,u型架31置于两组导向板23之间,使得u型架31沿着导向板23的方向运动,防止网板3在回收框2内晃动造成的垃圾掉落,值得注意的是,方板61小于u型架31内侧长宽,避免方板61与u型架31干涉。
37.收集箱5的底部两侧开设有渗水孔51,液压气缸62包括缸体621和活塞杆622,缸体621与回收框2固定,活塞杆622贯穿回收框2并与方板61固定。
38.控制装置12包括上位机系统和下位机系统,上位机系统包括上位机软件和电脑pc端,下位机系统包括主控制板、驱动模块、gps与无线通信模块和超声模块11。如图2所示,超声模块11安装在船头。
39.下位机船载系统以stm32f409开发板为核心,gps与无线通信模块、超声模块11以及驱动模块通过串口与主控板进行通信(如图8所示),船载下位机系统中的主控制板对各模块进行控制,并对各个模块不断进行读取,同时不断与超声波模块进行数据交互,并持续通过gps与无线通信模块和上位机进行数据传输。下位机通过串口收集原始gps数据,并将数据进行处理后,处理后的数据通过gprs网络传输到上位机,上位机发出控制命令后,下位机计算出无人船的偏角,并通过控制推进器电机和舵机转过的角度来实现无人船运动控制功能(如图9所示)。
40.无人船在进行自主航行时,为避免河道中障碍物影响无人清理船的正常工作,通过进行超声波避障设计来实现无人船的自主避障功能。
41.该自主避障设计的原理是在无人船在行驶的过程中,利用位于船体前端的超声模
块11,循环测量与前方障碍物的距离。如果检测到与障碍物之间的距离小于一定的值,则单片机对主控制板中初始自动控制程序进行中断,开始运行避障程序,避开障碍物后,又重新进入自动控制的程序,并按照初始自动控制程序继续行驶。
42.因为无人船在自主航行时遇到障碍物前优先于执行避障程序,所以超声模块11需要使用较高的优先级中断中断0。数据初始化后,通过检测串口0是否接收到来自单片机的超声数据来进行判断,并根据是否收到避障信号并做出不同的处理。若收到避障信号则进行对舵机和推进器的控制,否则执行串口1的判断,根据发送的指令进行数据的采集或无人船的控制(如图10所示)。
43.工作流程如下:
44.无人船本体1下水后,方板61置于回收框2内,且远离垃圾出口22的一侧,网板3的下表面与回收框2的最下端贴合,无人船本体1启动后,船头的方向为行进方向,回收框2的垃圾进口21下半部分置于水面下方,在无人船本体1向前行进的过程中,垃圾通过垃圾进口21进入到回收框2中的可升降的网板3上方,当回收框2内堆积大量的垃圾后,卷扬机4缠绕钢丝绳41,拉动u型架3以及网板3上堆积的垃圾向上运动,并当u型架31的上端与回收框2的顶部相抵后,此时液压气缸62运行,并通过活塞杆622将方板61向垃圾出口22的方向推进,使得网板3上方堆积的垃圾通过垃圾出口22被推入到收集箱5的内部,网板3上的垃圾清理至收集箱5的内部后,方板61收回到回收框2的左侧,卷扬机4将钢丝绳41放下,网板3是金属材质,在自身的重力作用下,运动至回收框2的下端,重复以上动作可对回收框2内打捞后的垃圾进行清理。
45.因此,本实用新型采用上述结构的一种城市内河水面漂浮物清理无人船,提高水面漂浮物清理效率,同时避免了大量垃圾堆积在水下增加船体阻力,机械式打捞,清洁效率高,同时又降低了人工成本。
46.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案而非对其进行限制,尽管参照较佳实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本实用新型的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本实用新型技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1