一种清淤作业机器人平台自动脱困装置及其作业方法与流程
本发明涉及一种清淤作业机器人,具体地说是涉及一种清淤作业机器人平台自动脱困装置,以及该自动脱困装置的作业方法。
背景技术:
1、目前,河道、管网、污水池等都会面临清淤需求。如化工厂里的污水池,长时间使用后会在池底积累大量的污泥,污泥中化学成分复杂,且含有大量的有机物,需要及时清理。现在多采用清淤机器人来代替人工进行清淤作业,安全性以及工作效率均比较高。
2、清淤机器人在进行作业时,一般是采用推铲或滚刀搅拌器等将底部淤泥打散,然后通过吸污泵进行抽吸,清淤机器人多采用履带式行走机构在池体底部移动行走。然而,由于淤泥在池体底部分布情况复杂,当清淤机器人在池体底部行走时,有时候淤泥会过多的积聚在清淤机器人的底部,即处于清淤机器人的两履带之间,此时过多积聚的淤泥会拖慢清淤机器人的行走速度,进而影响清淤工作效率,严重时甚至会导致清淤机器人无法行走,清淤工作被迫暂停,此时清淤机器人还需要借助外力进行脱困,费时费力。
技术实现思路
1、基于上述技术问题,本发明提出一种清淤作业机器人平台自动脱困装置,以及该自动脱困装置的作业方法。
2、本发明所采用的技术解决方案是:
3、一种清淤作业机器人平台自动脱困装置,包括淤泥刮除装置以及用于驱动淤泥刮除装置运转的驱动装置;
4、所述淤泥刮除装置设置在清淤作业机器人的底盘下方,处于清淤作业机器人的两侧履带之间;淤泥刮除装置包括水平导向板,水平导向板沿清淤作业机器人的行走方向布设,在水平导向板的底部间隔设置有若干个垂向刮板,垂向刮板与水平导向板相垂直,且垂向刮板垂直于清淤作业机器人的行走方向;
5、所述驱动装置安装在清淤作业机器人的底盘上,驱动装置包括连杆机构和用于带动连杆机构运转的动力电机,动力电机的转轴与摇柄的一端连接,摇柄的另一端与动力杆的一端转动连接,动力杆的另一端连接连杆机构;
6、所述连杆机构包括第一滑动支杆、第一导向杆、联动杆和第一同步杆,第一滑动支杆的顶部与联动杆的一端通过第一固定轴连接,第一固定轴的端部与第一导向滑槽滑动配合连接,第一导向杆的顶部与联动杆的另一端通过第二固定轴连接,第二固定轴的端部与第二导向滑槽滑动配合连接;
7、第一滑动支杆的底部与第一同步杆的一端转动连接,第一导向杆的底部与第一同步杆的另一端转动连接,第一滑动支杆和第一导向杆平行布置,第一同步杆和联动杆均呈水平布置,第一滑动支杆、联动杆、第一导向杆和第一同步杆组成平行四边形结构;
8、第一同步杆的两端分别通过支腿与水平导向板顶部的一侧连接;
9、所述第一固定轴与动力杆相连接;第一导向滑槽和第二导向滑槽均呈倾斜布置,且第一导向滑槽和第二导向滑槽相平行;第一导向滑槽和第二导向滑槽均安装在固定主支架上,固定主支架与清淤作业机器人的底盘固定连接。
10、优选的,所述水平导向板为扁平的长方体,水平导向板的内部中空,在水平导向板的两侧均开设有条形镂空淤泥导向孔,在水平导向板的顶面和底面均间隔设置有通孔。
11、优选的,所述连杆机构的上方还设置有同步稳定机构,同步稳定机构包括第二滑动支杆、第二导向杆和第二同步杆,第二滑动支杆的底端与联动杆的一端连接,第二滑动支杆的顶端与第二同步杆的一端连接,第二导向杆的底端与联动杆的另一端连接,第二导向杆的顶端与第二同步杆的另一端连接;第二滑动支杆和第二导向杆呈平行布置,第二同步杆呈水平布置,第二滑动支杆、第二同步杆、第二导向杆和联动杆组成平行四边形结构。
12、优选的,所述第一滑动支杆和第二滑动支杆为一体式结构,所述第一导向杆和第二导向杆为一体式结构。
13、优选的,所述清淤作业机器人的底盘包括支撑框架,支撑框架包括竖向支撑梁和横向支撑梁;所述固定主支架呈长条形,且沿清淤作业机器人的行走方向布设,在固定主支架的背面设置有固定块,所述固定块与竖向支撑梁相连接。
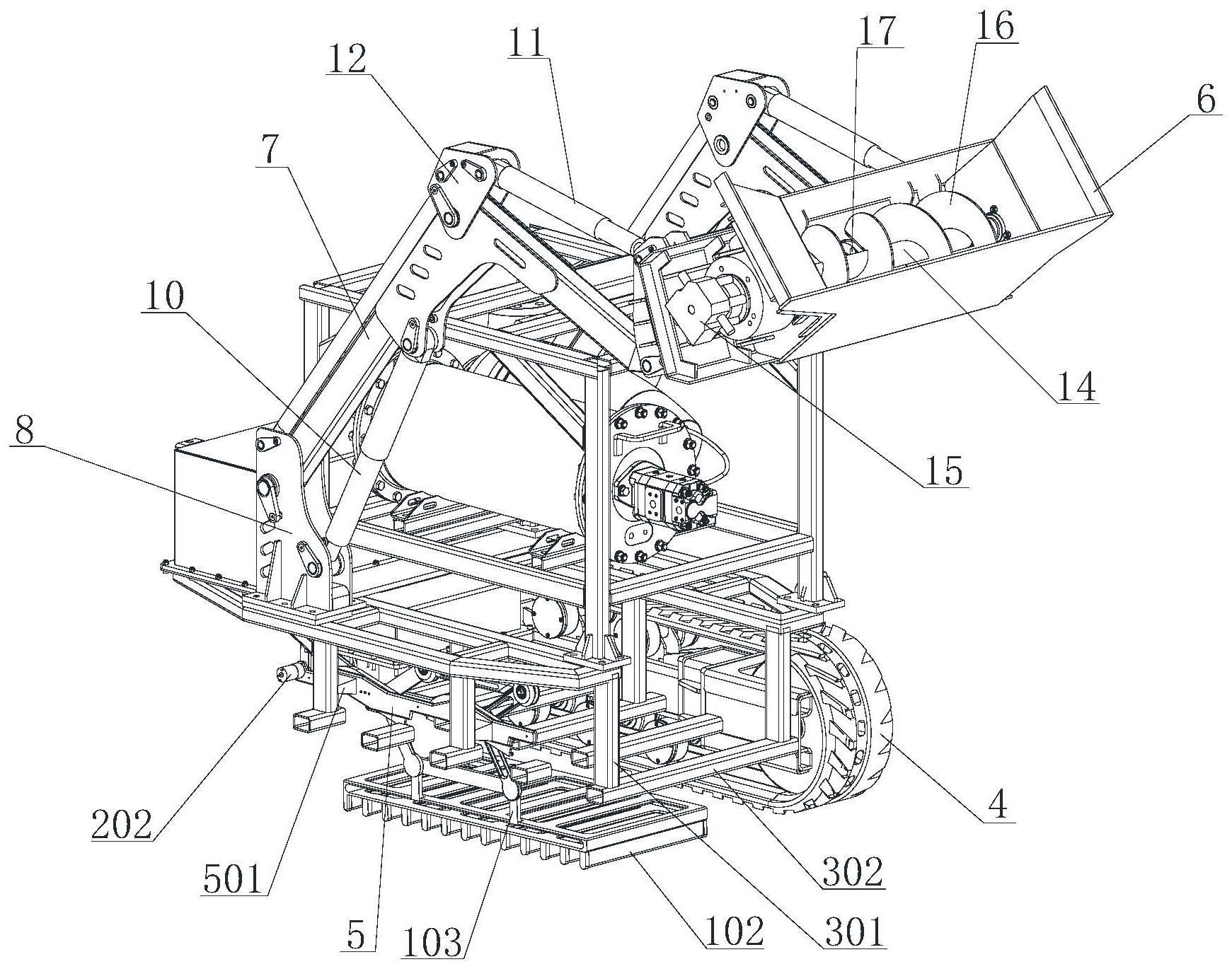
14、优选的,在清淤作业机器人的底盘上方还设置有清淤装置,所述清淤装置包括铲斗、支撑臂与动力伸缩杆,支撑臂的底端与固定座铰接,固定座安装在底盘上,铲斗安装在活动座上,活动座与支撑臂的顶端铰接;
15、所述动力伸缩杆包括第一伸缩杆和第二伸缩杆,第一伸缩杆的主体端与固定座铰接,第一伸缩杆的末端与支撑臂的中部铰接;第二伸缩杆的主体端与支撑臂铰接,第二伸缩杆的末端与活动座铰接。
16、优选的,所述支撑臂为l型,在支撑臂的拐角处设置有连接座,所述第二伸缩杆的主体端铰接在连接座上,在连接座和固定座之间还设置有连接杆;所述动力伸缩杆为电动推杆或液压缸。
17、优选的,在铲斗的内部还设置有搅拌轴,搅拌轴与搅拌电机传动连接,在搅拌轴上布置有螺旋形刀片;
18、在铲斗上还设置有淤泥抽吸口,淤泥抽吸口通过淤泥抽吸管道与淤泥抽吸泵连接,淤泥抽吸管道沿支撑臂的伸展方向布设,淤泥抽吸泵安装在清淤作业机器人的底盘上方,在淤泥抽吸泵的外侧设置有防护支架。
19、一种清淤作业机器人平台自动脱困作业方法,采用如上所述的自动脱困装置,包括以下步骤:
20、清淤作业机器人进行清淤时,清淤作业机器人底盘下方的淤泥通过淤泥刮除装置刮向清淤作业机器人的后方;
21、淤泥刮除装置通过驱动装置带动运转,驱动装置的动机电机带动摇柄转动,摇柄带动动力杆往复运动,动力杆在往复运动时带动第一固定轴沿第一导向滑槽上下滑动,第一固定轴通过联动杆同步带动第二固定轴沿第二导向滑槽上下滑动;
22、当第一固定轴沿第一导向滑槽上下滑动,第二固定轴沿第二导向滑槽同步上下滑动时,第一固定轴带动第一滑动支杆和第二滑动支杆移动,并使得第一滑动支杆和第二滑动支杆与联动杆之间的夹角变化;第二固定轴带动第一导向杆和第二导向杆移动,并使得第一导向杆和第二导向杆与联动杆之间的夹角变化;
23、第一同步杆使得第一滑动支杆和第一导向杆同步运动,第二同步杆使得第二滑动支杆和第二导向杆同步运动;
24、在第一滑动支杆和第一导向杆移动过程中,通过支腿带动水平导向板和其上的垂向刮板进行向后-向上-返回的重复动作,将清淤作业机器人底盘下方的淤泥刮除,实现清淤作业机器人平台自动脱困。
25、上述清淤作业机器人进行清淤时,通过两侧履带实现行走,通过动力伸缩杆和支撑臂带动铲斗移动,并配合铲斗内部搅拌轴上布置的螺旋形刀片将淤泥粉碎打散,然后经淤泥抽吸口、淤泥抽吸管道与淤泥抽吸泵进行清除淤泥。
26、本发明的有益技术效果是:
27、本发明通过在清淤作业机器人的底盘下方设置淤泥刮除装置,可在清淤作业机器人行走清淤时,能够及时高效的将清淤作业机器人底盘下方的淤泥刮除,防止清淤作业机器人底盘积聚过多淤泥,以致拖慢清淤作业机器人的行走速度等,确保了清淤工作的顺利进行,提高了清淤工作效率。
28、本发明中的驱动装置采用动力电机通过摇柄、动力杆带动连杆机构运动的方式,并将连杆机构设置为平行四边形结构,配合固定轴沿倾斜导向滑槽的往复运动,可较好实现与连杆机构相连接的淤泥刮除装置的往复刮除淤泥动作,结构设计合理,动作高效,而且具有优异的运行稳定性。
29、本发明中的淤泥刮除装置采用水平导向板和垂向刮板的布置方式,而且水平导向板的内部中空,并在其上设置有条形镂空淤泥导向孔等,即确保了执行动作时对淤泥的刮除效果,又可避免淤泥在水平导向板等上粘附积聚。
30、本发明清淤作业机器人的底盘采用竖向支撑梁和横向支撑梁形成的支撑框架结构,并且将导向滑槽固定在固定主支架上,固定主支架通过固定块与支撑框架连接,即不会干涉驱动装置和淤泥刮除装置的运行,而且结构比较稳固。
31、本发明中的清淤装置包括铲斗、支撑臂与动力伸缩杆,动力伸缩杆驱动支撑臂运动,进而带动铲斗执行相关动作,并且在铲斗内部布置有螺旋形刀片,对淤泥的粉碎效果好,而且破碎后的淤泥可直接通过铲斗处的淤泥抽吸口进行抽吸,淤泥清除效率高。
- 还没有人留言评论。精彩留言会获得点赞!