一种水下清淤机器人的控制系统及其清淤方法与流程
本发明属于疏浚工程,具体涉及一种水下清淤机器人的控制系统及其清淤方法。
背景技术:
1、cn113931246a公开了一种疏浚硬质土的水下清淤机器人,该水下清淤机器人采用绞刀和泥泵进行疏浚作业。在疏浚工作中,对清淤机器人的控制主要在于协调挖掘产量和输送量。
2、在沙土、砾石等土质的挖掘过程中,土体粒径是固定的,即砂砾自身的尺寸,与切削过程无关,而在硬质土的挖掘过程中,由于硬质土的特殊性,切削过程中参数的控制会直接影响土体粒径,土体粒径处于变化状态,使得作业参数更加复杂多变,给整个控制系统带来了全新的问题。
3、因此有必要针对硬质土挖掘过程中作业参数的特殊性,提供一种水下清淤机器人的控制系统及其清淤方法。
技术实现思路
1、为克服上述现有技术的不足,本发明提供了一种水下清淤机器人的控制系统及其清淤方法。
2、本发明采用的技术方案如下:
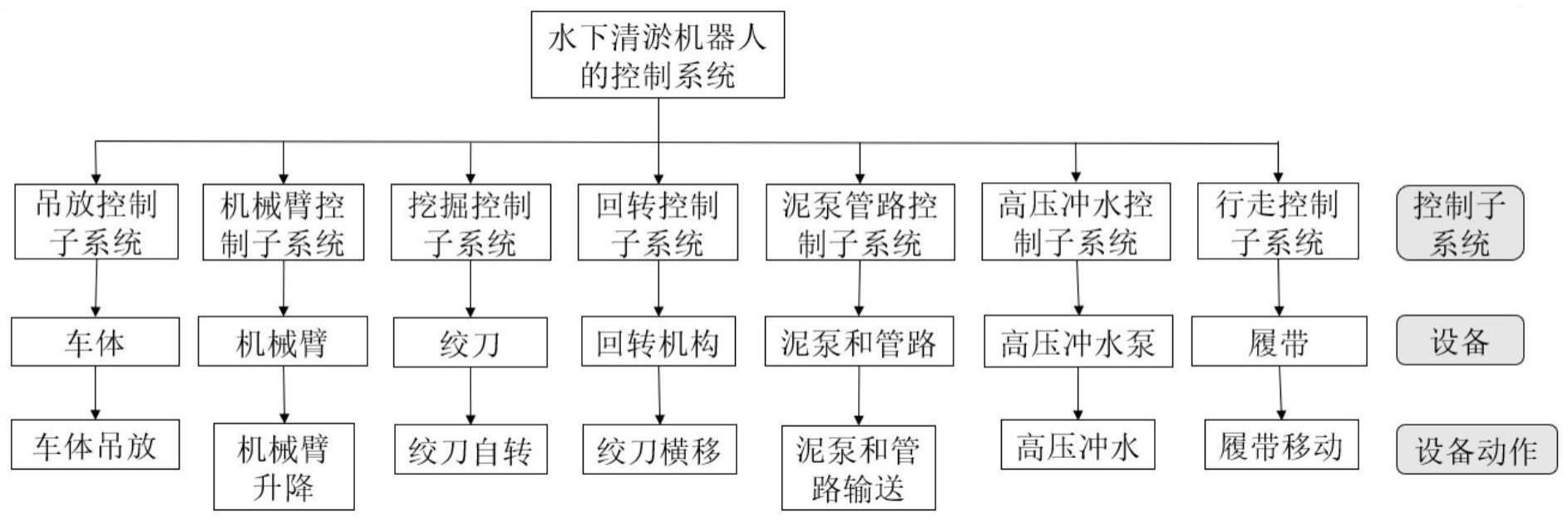
3、本发明的第一个方面提供了一种水下清淤机器人的控制系统,所述控制系统包括七个控制子系统,分别为吊放控制子系统、机械臂控制子系统、挖掘控制子系统、回转控制子系统、泥泵管路控制子系统、高压冲水控制子系统和行走控制子系统,所述七个控制子系统分别控制车体、机械臂、绞刀、回转机构、泥泵和管路、高压冲水泵、履带共七个设备,并分别控制相应七个设备执行车体吊放、机械臂升降、绞刀自转、绞刀横移、泥泵和管路输送、高压冲水和履带移动共七个设备动作;
4、所述水下清淤机器人在疏浚硬质土作业中包括挖掘硬质土和输送硬质土两个核心环节,所述机械臂控制子系统、挖掘控制子系统和回转控制子系统协同配合控制绞刀将硬质土切碎并搅起,所述泥泵管路控制子系统控制泥泵将切削下来的硬质土同周围的水体一起抽吸上来,并通过管路输送出去;
5、其中,所述机械臂控制子系统、挖掘控制子系统和回转控制子系统协同控制硬质土的挖掘产量、切削下来的硬质土的土体粒径和绞刀受到的切削受力;所述挖掘产量结合泥泵和管路的参数,即泥泵-流量特性曲线、泥泵转速,以及管路的长度和直径,进一步计算出管路内的浆体流速、输送浓度和输送流量,所述泥泵和管路的输送量同时限制硬质土的挖掘产量,以避免出现淤堵。
6、进一步地,在挖掘硬质土的过程中,所述机械臂控制子系统控制机械臂下降,以增加绞刀的埋深,挖掘产量提高;所述回转控制子系统控制回转机构提高绞刀横移的速度,挖掘产量提高。
7、进一步地,所述挖掘控制子系统控制绞刀的转速,所述回转控制子系统控制绞刀横移的速度,两者共同控制切削下来的硬质土的土体粒径a,计算公式如下:
8、
9、式(1)中,vs为绞刀横移的速度,n为绞刀的转速,m为绞刀上的刀齿排数。
10、进一步地,所述泥泵在不同转速运转时其扬程-流量特性曲线不同,根据比例定律所述泥泵管路控制子系统控制泥泵提高其转速,管路内的输送流量增加。
11、进一步地,所述管路内的输送浓度控制在11-17%。
12、进一步地,所述绞刀横移的速度和绞刀的齿尖线速度的合速度为土粒速度,所述绞刀的齿尖线速度=2πr*n,n为绞刀的转速,r为绞刀半径;所述土粒速度的上限为吸口流速的30%,具体的公式表示如下:
13、v土粒速度≤30%v吸口流速 (2)
14、v吸口流速=q输送流量/s吸口面积 (3)
15、式(3)中,s吸口面积为绞刀内侧的管道吸口的吸口面积,s吸口面积为常量。
16、进一步地,所述管路内的输送浓度和土体粒径结合,通过经验公式计算出临界流速,且管路内的浆体流速为临界流速的1.1-1.5倍;同时所述绞刀由电机或者液压马达驱动,所述绞刀的切削受力受结构强度的限制,所述绞刀的功率的最大允许值即电机或液压马达的额定功率。
17、进一步地,在水下清淤机器人的疏浚过程中,对管路内的浆体流速、输送浓度,以及土粒速度和绞刀的功率进行监测,在异常工况下分别通过挖掘控制子系统、回转控制子系统、机械臂控制子系统和泥泵管路控制子系统对绞刀的转速、绞刀横移的速度、机械臂的升降和泥泵的转速进行调控,以保证整个疏浚作业安全、高效、稳定地进行。
18、进一步地,在以下五种情况下分别采用不同的调控方法:
19、(1)当浆体流速<1.1*临界流速,且输送浓度偏高时,则先通过泥泵控制子系统提高泥泵的转速,以快速提升浆体流速,其次通过回转控制子系统降低绞刀横移的速度,以减小土体粒径,降低临界流速,同时也降低了挖掘产量,进而降低输送浓度;
20、(2)当浆体流速<1.1*临界流速,且输送浓度偏低时,则先通过挖掘控制子系统提高绞刀的转速,减小土体粒径;同时,需要避免绞刀的功率超过其最大允许值,并计算土粒速度,且避免其超过土粒速度上限,以免造成较大的遗漏量;
21、(3)当浆体流速>1.5*临界流速,且输送浓度偏高时,则先通过泥泵管路控制子系统降低泥泵的转速,减少能源浪费;其次,通过挖掘控制子系统降低绞刀的转速,减小绞刀的功率,进一步在满足疏浚需求下降低能耗;最后,通过回转控制子系统降低绞刀横移的速度,以降低输送浓度,避免造成浓度局部突然升高而发生堵管;
22、(4)当浆体流速>1.5*临界流速,且输送浓度偏低时,则先通过回转控制子系统增大绞刀横移的速度,以增加挖掘产量,但同时需要避免绞刀的功率超过其最大允许值,并计算土粒速度,且避免其超过土粒速度上限,以免造成较大的遗漏量;其次,通过机械臂控制子系统控制机械臂下降,增加绞刀的埋深,以增加挖掘产量;若输送浓度增加后,浆体流速依然偏高,此时按照第三种情形进行调控;
23、(5)当由于土体突然变硬导致绞刀功率突然增加时,则先通过回转控制子系统降低绞刀横移的速度,并在绞刀的功率允许范围内通过挖掘控制子系统提高绞刀的转速,并计算土粒速度,且避免其超过土粒速度上限,以免造成较大的遗漏量。
24、本发明的第二个方面提供了一种水下清淤机器人的清淤方法,其特征在于,包括以下步骤:
25、①备车:按顺序依次启动绞刀、泥泵和高压冲水泵;根据土质硬度和需要的挖掘的深度,设定绞刀的转速和泥泵的转速,调节机械臂,使绞刀埋入土体中,并调整到合适的作业高度和角度;
26、②横扫:准备工作做完后开始清淤,根据土质情况优选作业参数,并根据挖掘产量和输送量的匹配关系,控制回转机构按照一定的回转速度向左或向右水平转动,回转机构带动绞刀横移,同时绞刀自转将硬质土逐步切削下来,切削下来的土块通过泥泵抽送走;此时,绞刀自转、高压冲水、泥泵输送、绞刀横移四个设备动作同时执行;
27、③移位:保持绞刀自转、高压冲水和泥泵输送三个动作持续运转,控制履带使整个车体前进;此时,绞刀自转、高压冲水、泥泵输送和履带行走四个动作同时执行;
28、④完成:重复上述作业流程,完成下一个断面的疏浚。
29、本发明的水下清淤机器人的控制系统及其清淤方法的有益效果如下:
30、本发明首次提出水下清淤机器人自动控制系统,并通过水下清淤机器人自动控制技术,实现水下机器人清淤施工自动化,可以在保障设备安全的前提下,提高清淤施工效率,减少人工成本。本发明的水下清淤机器人的控制系统,解决了硬质土输送土体粒径变化使得作业参数分析更为复杂的难题,通过对疏浚过程中的关键参数进行监测和调控,并给出不同异常作业情况下的参数调控方法,以保证整个疏浚作业的安全、高效、稳定进行。
- 还没有人留言评论。精彩留言会获得点赞!