用于在挖掘任务期间处理折断线的无缝渡越的系统的制作方法
本发明涉及一种配备有工具的挖掘机器(excavating machine),该挖掘机器允许该工具在实际空间中的位置和取向(姿势)方面多达六个自由度(degree-of-freedom,dof);以及一种用于在挖掘任务中在从参考表面中的一个多边形到参考表面中的另一多边形的渡越(transition)期间控制工具的朝向(heading)和运动方向的方法。
背景技术:
1、挖掘机是施工机械,其包括:工具(特别是铲斗);用于使工具移动的挖掘机臂,该挖掘机臂通常包括多个接头(joint),例如,动臂(boom)、杆、底盘(通常是在具有履带(track)或车轮的可移动底架上可旋转约360°的底盘)。这些机器是以多种方式来使用的,例如用于采掘、景观美化、物料处理。一般的挖掘机通常配备有适配器,该适配器允许快速更换为了具体任务而配置的工具。由于该特征,当代的挖掘机例如还可以配备有用于刷切或林业任务的液压锯和推进器(mover);配备有用于拆除作业的液压爪、切割器以及破碎机;配备有用于采矿任务的打桩机或液压钻机;或者配备有用于除雪任务的扫雪机和吹雪机。
2、挖掘机器的另一典型实施方式是所谓的反铲挖掘机或反铲。挖掘机的底盘是另一种类型的作业机器(例如,拖拉机),并且挖掘机臂是以永久或临时的方式附接至作业机器的后侧的。例如,jp 2010-71054a公开了这种作业机器。
3、作为示例,除非另外指定,否则从这里起表示更通用类型的挖掘机器的挖掘机能够相应地应用其它类型的挖掘机器(特别是反铲)的具体特征。
4、作为示例,从这里起将铲斗呈现为挖掘机的一般工具的代表。可以相应地应用其它类型的挖掘机工具(例如,耙子)的具体特征。而且,由于一般的挖掘机通常被配置成快速地更换工具,因此,在没有特殊准备步骤的情况下,并且在使用铲斗作为挖掘机的一般工具的代表的现场条件下,不意味着根据本发明的挖掘机必须以永久的方式配备有铲斗或任何其它工具。
5、铲斗包括铲斗刃口(edge),该刃口被专用于接触表面。铲斗本身也以各种形状和尺寸被使用。例如,将具有直切割刃口的宽大容量(泥浆)铲斗用于清理和整平。特别地,直切割刃口通常被用于待采掘的软物料,其中,对于较硬的物料,切割刃口是由一排齿形成的。作为另一示例,通用铲斗通常更小更坚固,并且具有被用于突破硬地面和岩石的硬化侧刀(side cutter)和齿。
6、普通挖掘机在挖掘机底盘中具有用于挖掘机操作员的驾驶间或驾驶室。底盘通常是可旋转的。典型挖掘机共用基本设置,其中,挖掘机臂的最靠近驾驶室的节段被称为(主)动臂,而承载工具的节段被称为杆(也被称为戽斗或戽斗杆)。作为示例,除非另外指定,否则“常规的”挖掘机设置(其中,底盘是可旋转的,并且臂包括动臂和杆)从这里起表示更一般的设置。能够相应地应用其它类型的设置(特别是摆臂式动臂挖掘机)的具体特征。
7、典型的现代挖掘机利用液压缸和马达来完成臂的移动。其它类似的方法(例如,绞车和钢索)也是可能的。作为示例,液压缸和马达从这里起被呈现为驱动挖掘机臂的一般装置的代表。能够相应地应用驱动挖掘机臂的其它装置(例如,钢索、电动机等)的具体特征。
8、(主)动臂附接至驾驶室,并且可以是几种不同构型中的一种,例如,不允许除直上直下外的移动的单动臂;或者在中间附近的所谓“转向节(knuckle)”处铰接的转向节动臂,使其像手指一样折回来。另一选项是在动臂的基部处的铰链,该铰链允许动臂独立于驾驶间枢转,例如,枢转高达180度。然而,这种铰链通常仅可用于小型挖掘机。此外,有些专门的构型是已知的,例如,三关节动臂(triple-articulated boom)。
9、被附接至动臂端部的是杆,其中,杆长度例如根据是需要伸展动力(较长杆)还是需要倒空(break-out)动力(较短杆)而发生改变。杆长度也可以是液压可调整的。
10、通常,将工具经由工具接头附接至杆,该工具接头至少允许工具相对于杆沿俯仰方向(通常沿上下方向)转动。通常,沿倾斜方向(例如,沿左右方向)的转动也是可能的。
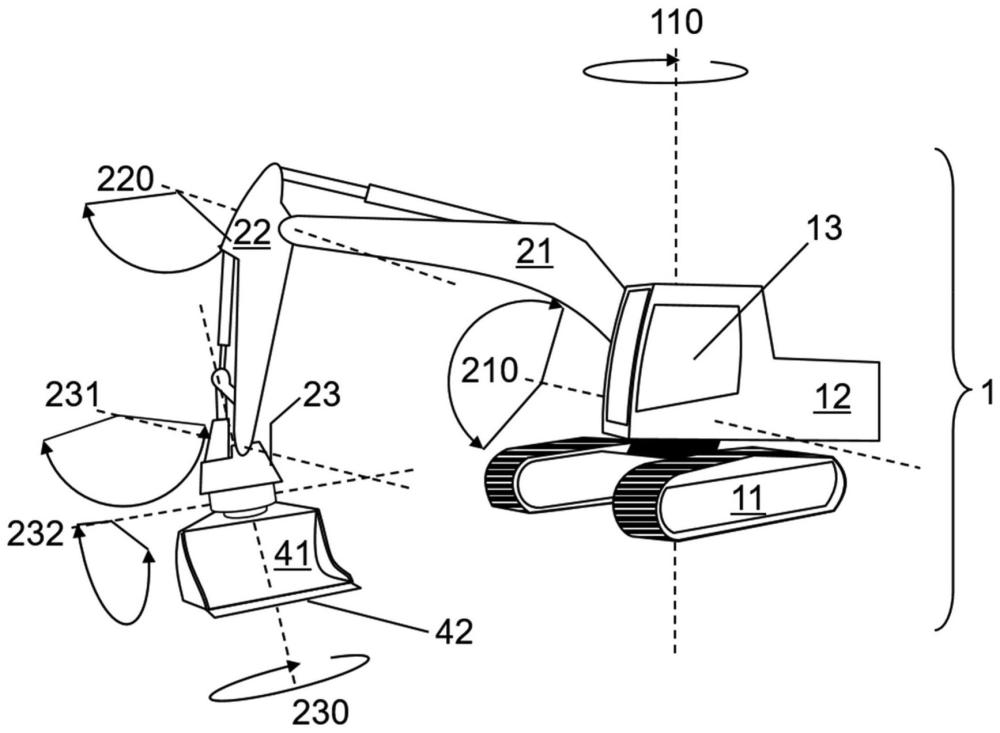
11、一种特殊的挖掘机类型还以处于杆的端部与工具之间的所谓倾斜-旋转器为特征,以便增加挖掘机的灵活性和精度。例如,这种倾斜-旋转器式挖掘机经常用在斯堪的纳维亚(scandinavia)的国家。可以将倾斜-旋转器最佳地描述为处于杆与工具之间的腕关节,该腕关节允许工具绕转子轴线旋转(通常旋转达360度),其中,工具还可以绕垂直于转子轴线的俯仰轴线以及垂直于转子轴线和俯仰轴线的倾斜轴线转动,例如在每种情况下转动高达±45度。例如,在ep 2364389 b1中描述了一种用于倾斜-旋转器的挖掘机系统和控件。
12、倾斜-旋转器允许以6dof精确地调整工具(特别是工具刃口)的姿势,并且在外部参考系中以另一独立的3dof来限定工具的运动方向。作为示例,将倾斜-旋转器从这里起呈现为允许工具在外部参考系中的6dof姿势(特别是朝向)和3dof运动方向控制的一般设置的代表。能够相应地应用具有类似能力的其它挖掘机臂的具体特征。
13、定位铲斗或者限定铲斗方向的一种普遍方式是操作员例如利用操纵杆直接限定液压缸的位置,这种控制装置例如在ep 1705545 a1中进行了公开。然而,即使是简单的移动(比如在打开铲斗的同时使铲斗沿水平移动笔直向前),也需要操纵杆上的多个经协调的移动。由于液压缸的取向在工具移动期间不断改变,因此,这些移动不是直观的且容易出错。从而,即使对于受过训练的和有经验的操作员,这种执行通常也是无成效的。
14、在现有技术中已知一种辅助驾驶员设定铲斗的给定实际空间位置的系统,例如,wo 2014/209209a1公开了一种系统,其中,自动地调整挖掘机臂的接头以提供由操作员指定的实际空间移动。
15、与将平坦表面分级(grading)的任务所严格必需的dof相比,典型的挖掘机具有更多的dof。这意味着铲斗刃口可以使用接头角度的多种组合来与表面对准。还可以存在用于重新定位路径的多个选项,并且可以计算关于某些标准的最佳路径。在现有技术中已知一种半自动重新映射系统(特别是基于反向运动学的半自动重新映射系统),其中,操作员只须选择新目标姿势,而由挖掘机的计算单元来生成和控制重新定位路径,例如,us 9,976,285 b2或ep 3 719 212 b1就公开了这样的系统。
16、在现有技术中还已知一种系统,其中,挖掘机以及至少其铲斗在外部坐标系中的位置以及相对于表示施工任务的设计数据。例如,ep 3 719 212 b1公开了一种系统,其中,利用传感器布置来确定挖掘机的绝对或相对位置,并且铲斗是根据操作员命令而移动至相对于设计数据的期望姿势。
17、设计数据通常包括参考表面。对于典型的挖掘任务,参考表面(例如,壕沟或铁路路堤)由多边形组成。多边形的接缝(joining)被称为折断线(breakline)。在铲斗与所述折断线对准的情况下,折断线的无缝渡越才有可能。如果铲斗未对准,则铲斗要么突破参考表面,要么留下三角形残留物。
18、现有技术的挖掘机可以防止穿过参考表面,然而这是以在表面上方留下挤出的残留物为代价的。现有技术需要对挖掘机进行重新定位,并开始第二次挖掘操作,这导致效率低下。
技术实现思路
1、本发明的目的
2、考虑到上述情况,本发明的目的是,提供一种用于挖掘机器的控制器,该控制器被配置成提供折断线的无缝过渡,从而消除对用于去除残留物的第二次挖掘任务的需要。本发明还涉及一种实现折断线的无缝渡越的方法和计算机程序产品。
3、发明概要
4、本发明涉及一种用于挖掘机器的控制器。挖掘机器包括:工具、臂、底盘、以及一组传感器。
5、挖掘机器可以进行永久设置。另选地,挖掘机器可以是另一类型的作业机器,或者是具有临时附接至其的挖掘臂(excavating arm)的拖拉机。可以将该组传感器所包括的一个或更多个传感器定位在底盘、臂或工具之中或之上。该组传感器所包括的一个或更多个传感器可以位于外部。
6、工具包括工具刃口。工具刃口可以专用于接触表面。工具刃口可以是工具的连续物理刃口或者假想刃口,特别是在有齿的铲斗或耙子的情况下。作为从这里开始的示例,工具的位置由工具刃口的位置(特别是工具刃口的中间)来表示。对于某些任务,对不同的参考点的选择可能是有利的。可以相应地应用另选参考点(例如,工具的中心)的具体特征。作为从这里开始的示例,挖掘工具的姿势是在外部(特别是全局)坐标系中的姿势。对于某些任务,对不同的坐标系的选择可能是有利的。可以相应地应用另选坐标系的具体特征。
7、该臂包括多个连杆以及用于使工具移动的工具接头,其中,工具被附接至工具接头。虽然利用具体设计描述了本发明的一些特征,但是本发明不限于那些设计。可以将本发明例如应用于挖掘机或反铲型挖掘机器。本发明不限于挖掘臂被永久附接的设计。本发明可以通过挖掘机器来实现,该挖掘机器的臂由液压装置、借助于钢索、借助于电动机或者由任何另选装置来驱动。本发明可以通过动臂、杆、或工具接头的任何具体设计来实现。本发明还可以通过另一种形式的关节臂来实现。
8、该组传感器被配置成提供与工具的位置和朝向有关的传感器读取数据。该组传感器可以提供与工具的6dof姿势有关的传感器读取数据。操作员可以具有限定取向参数而不是朝向的自由。除了朝向之外的取向参数可能因与挖掘任务相关的其它情况而受到限制。该组传感器可以提供与工具的运动方向有关的传感器读取数据。该组传感器还可以包括定位传感器,该定位传感器提供关于挖掘机相对于外部(特别是全局)坐标系的位置的传感器读取。这样的传感器可以包括一个或更多个gnss传感器,特别是允许实时运动学测量的高精度gnss传感器,或者从大地测量装置(例如,全站仪)获得信息的传感器布置。该组传感器还可以包括成像传感器、扫描(特别是激光扫描)传感器、激光雷达传感器、或雷达传感器。虽然所述传感器中的至少一部分需要位于挖掘机本身之中或之上,但是其它传感器(特别是采用全站仪形式的定位传感器)可以位于外部位置。本发明决不限于对专门位于挖掘机之中或之上的传感器的利用。
9、工具的姿势可以通过直接测量来提供。工具的姿势可以通过评估底盘和臂的接头的状态来间接提供。工具的运动方向可以根据直接测量来提供。另选地,运动方向可以根据姿势的变化率来导出。代替运动方向,也可以利用速度矢量。除非另外指定,否则可以通过用速度矢量部分或完全取代运动方向来执行本发明。作为对速度矢量(线性导数)的补充,也可以导出并利用角速度。
10、控制器包括输入接口和计算单元。控制器可以包括输出接口。输入接口、输出接口、以及计算单元是控制器的组件的功能定义而非结构定义。计算单元、输入接口、以及输出接口可以是分布式的。一些结构组件(特别是触摸屏)可以提供输入接口和输出接口两者的功能。一些结构组件可以提供计算单元和输入/输出接口两者的功能。
11、输入接口被配置成接收操作员的操作员转向命令(operator steeringcommand),该操作员转向命令与工具的期望位置和朝向和/或移动有关。输入接口可以被配置成接收操作员的操作员转向命令,该操作员转向命令与工具的期望姿势有关。工具的移动可以是旋转。操作员可以非远程地操作挖掘机器,然而,本发明不限于操作员从驾驶员室直接操作挖掘机器的情况。输入接口可以包括一个或更多个操纵杆。输入接口可以允许对臂的连杆的姿势或底盘的直接控制。输入接口可以为计算单元提供转向命令,以用于半自动地实现挖掘工具的移动,特别是在反向运动学方面的移动。输入接口可以包括触摸屏的输入区。输入接口可以允许某些特征的启用,特别是手动模式与半自动模式之间的选择。输入接口可以允许执行挖掘机的预定义的或用户定义的自动移动。作为示例,预定义的或用户定义的自动移动可以包括具有用户定义的工具取向以及预定义的或用户定义的速度分布(逐步上升、恒定速度、逐步下降)的分级操作。输入接口可以允许操作员辅助特征的启用,特别是设定或限制工具的速度或者锁定一个或更多个姿势dof。这种预定义的或用户定义的自动移动以及操作员辅助特征被认为是本发明的操作员转向命令。不必说,本领域技术人员会认识到,上述非排它性列表包括可彼此组合的特征。
12、输入接口可以是分布式的。某些功能可以由一个或更多个操纵杆、由开关/按钮控制,而其它功能可以由一个或更多个触摸屏控制。某些功能可以通过两个或多个另选装置(即,通过操纵杆上的按钮和/或单独开关和/或经由触摸屏的输入区)控制。操作员还可以通过输入接口提供或修改用户定义的操作员辅助特征或自动移动。技术人员还可以实现类似于上述列表的另选输入接口。这样的组合和另选方案处于本发明的含义内。
13、计算单元被配置成读取操作员转向命令,并且控制臂以再现工具的期望位置和朝向和/或移动。操作员转向命令可以包括预定义的或用户定义的自动移动或操作员辅助特征。
14、计算单元被配置成读取包括参考表面的设计模型。参考表面包括限定折断线的两个多边形。根据本发明的多边形还覆盖了可以由折断线附近的多边形局部近似的平面图,特别是非封闭平面图或者包含弯曲段的平面图。计算单元被配置成相对于设计模型来参考工具的位置和朝向。设计模型可以是挖掘任务的计算机辅助设计模型。不必说,基于其它设计标准的设计模型也是可能的。运动方向可以参考该参考表面的第一多边形和第二多边形。从这里起,参考第二多边形的运动方向可以被称为第二运动方向,其中,这种区别提高了文本的可读性。由于可以在没有与参考系有关的限制的情况下应用本发明,因此,这些术语纯粹是描述性的以提供可读性。运动方向和第二运动方向原本就是等同的特征。
15、在一些实施方式中,该组传感器包括成像传感器、扫描(特别是激光扫描)传感器、激光雷达传感器、或雷达传感器。对于这样的实施方式,挖掘机可以连续地或者以规则的间隔获得关于实际表面的状况。计算单元可以针对参考表面来参考实际表面,并且可以更新挖掘任务的状况。这些传感器中的一些传感器可以位于外部位置。
16、计算单元可以存储关于挖掘工具的几何形状的信息。计算单元可以存储关于多个进一步工具的几何形状的信息。实际安装的工具可以经由自动识别功能来识别,或者可以由操作员选择。
17、控制器被配置为执行半自动表面跟随功能,其中,基于工具相对于设计模型的实际参考位置和朝向并且基于实际读取的操作员转向命令,来生成操作员转向命令调整命令,以便根据参考表面来重定向工具刃口。不必说,可以利用6dof姿势来代替位置和朝向。
18、很明显,本领域技术人员可以实现另选设计解决方案来生成操作员转向命令调整命令。控制器可以生成附加命令,该附加命令向底盘或臂提供对直接操作员转向命令的调整。另选地,控制器可以基于对操作员转向命令的解释来生成一组新命令,并且仅将该一组新命令发送至底盘和/或臂。另选地,控制器可以锁定一些接头,特别是负责工具的取向的接头,并且不向这些接头发送操作员转向命令。本发明不限于任何具体的设计选择。
19、控制器还被配置为执行包括以下项的半自动折断线渡越功能:1.)基于特别是与工具的运动方向或速度有关的实际读取的操作员转向命令,并且基于工具相对于设计模型的折断线的实际参考位置和朝向,来识别折断线渡越移动;2.)基于工具相对于设计模型的实际参考位置和朝向并且基于实际读取的操作员转向命令,来生成操作员转向命令调整命令,以便使工具刃口与折断线平行对准。
20、在一些实施方式中,半自动折断线渡越功能可以生成操作员转向命令调整命令,以便使工具刃口相对于预定义的或用户定义的自动移动来与折断线平行对准。而且,操作员转向命令调整命令可以被生成为使得这些操作员转向命令调整命令遵守进一步操作员辅助特征,特别是速度限制。
21、在一些实施方式中,将半自动折断线渡越功能与半自动表面跟随功能相结合。该半自动折断线渡越功能通过以下来实现:基于工具相对于设计模型的实际参考位置和朝向并且基于实际读取的操作员转向命令,来生成操作员转向命令调整命令,以便1.)使工具刃口与折断线平行对准;2.)根据参考表面重定向工具刃口。不必说,可以将预定义的或用户定义的自动移动或者操作员辅助特征与这样的实施方式组合利用。
22、在半自动折断线渡越功能的一些实施方式中,工具的运动方向垂直于折断线。该半自动折断线渡越功能通过以下来实现:基于工具相对于设计模型的实际参考姿势并且基于实际读取的操作员转向命令,来生成操作员转向命令调整命令,以便1.)使工具刃口与折断线平行对准;2.)根据参考表面重定向工具刃口;3.)使工具刃口沿着垂直于折断线的运动方向移动。
23、在某些情况下,朝着折断线的非垂直运动方向可能是优选的。利用根据本发明的控制器可以实现垂直和非垂直接近方向两者。工具刃口的运动方向也可以在接近期间改变。
24、在一些实施方式中,在到达折断线之后,计算单元可以根据参考表面的第二多边形来对准工具。典型地,连续的挖掘动作可能是优选的,其中工具移动在渡越折断线并对准至第二多边形之后继续。然而,本发明不限于这样的实施方式。特别是其中挖掘动作在折断线处停止的其它实施方式可以利用根据本发明的控制器。
25、在一些实施方式中,控制器还被配置为:1.)在半自动折断线渡越功能启用时,存储表示工具的朝向的先前朝向数据;2.)基于先前朝向数据,在渡越折断线之后,自动恢复工具的朝向。不必说,在恢复移动期间,工具的任何部分都不在参考表面之下。恢复可以被执行为使得工具刃口的一端接触折断线。与折断线的对准可以被执行为使得工具刃口的一端接触折断线。该特征是特别有利的,因为工具的朝向会影响残留物是沉积在工具的左侧还是右侧。因此,操作员可能更喜欢将工具移动成使得工具刃口成角度。
26、在一些实施方式中,控制器还被配置为:1.)存储表示工具的先前取向和运动方向的数据,所述先前取向和运动方向表示在半自动折断线渡越功能启用时的状态;2.)生成操作员转向命令调整命令,以便在渡越折断线之后将工具重定向成第二取向和第二运动方向。相对于第二多边形的第二取向和第二运动方向分别等于所存储的相对于第一多边形的先前取向和运动方向。
27、在一些实施方式中,挖掘机器是挖掘机。在一些更具体的实施方式中,挖掘机具有可旋转底盘。
28、在一些实施方式中,挖掘机器是反铲型挖掘机器。不必说,除了这里列出的具体实施方式之外,本领域技术人员还可以设想根据本发明的挖掘机器的进一步实现。
29、在一些实施方式中,挖掘工具是铲斗,并且工具刃口是被构造成接触表面的迎角刃口(attack edge)。根据本发明,也可以利用其它工具,特别是耙子、推土机刮铲(bulldozer blade)和装载机(loader)。
30、在一些实施方式中,臂包括动臂和杆。动臂可以是几种不同构型中的一种,例如,不允许除直上直下之外的移动的单动臂;或者在中间附近的所谓“转向节”处铰接的转向节动臂,使其像手指一样折回来。另一选项是在动臂的基部处的铰链,该铰链允许动臂独立于底盘枢转,例如,枢转高达180度。杆长度可以取决于任务,在一些实施方式中,杆长度也可以是液压可调整的。
31、在一些实施方式中,挖掘机器是挖掘机,底盘可旋转360°,工具是铲斗,臂包括动臂和杆(“常规设置”)。
32、在一些实施方式中,工具接头是倾斜-旋转器。由于倾斜-旋转器提供了额外的dof,因此配备有倾斜-旋转器的挖掘机特别适合于实现本发明。不过,没有倾斜-旋转器的另选实施方式也可以利用本发明。倾斜-旋转器可以与前面段落中的“常规设置”一起应用。
33、在一些实施方式中,控制器还被配置为执行半自动平行操作功能,该半自动平行操作功能包括:1.)基于特别是与工具的运动方向或速度有关的实际读取的操作员转向命令,并且基于工具相对于设计模型的折断线的实际参考位置和朝向,来识别平行操作移动;2.)基于工具相对于设计模型的实际参考位置和朝向并且基于实际读取的操作员转向命令,来生成操作员转向命令调整命令,以便a.)根据参考表面来重定向工具刃口;b.)将工具刃口重定向到这样的位置,即,在该位置中,工具刃口接触折断线;c.)使工具刃口在参考表面中沿平行于折断线的方向移动。
34、不必说,在本发明的含义内,平行操作功能的另选实施方式也是可能的。特别是,执行这样的平行操作,其中,工具刃口以相对于折断线的操作员可选偏移量(offset)来转向。
35、而且,对于包括多于一个折断线的参考表面,可以将折断线渡越功能和平行操作功能组合。
36、在一些实施方式中,该组传感器被配置成获取包括关于实际表面的信息的传感器读取数据。在一些实施方式中,该组传感器包括以下项中的至少一者:1.)成像传感器;2.)扫描传感器;3.)激光雷达;以及4.)雷达。在一些实施方式中,控制器包括输出接口。输出接口可以被配置成显示:a.)工具的姿势或者位置和朝向、参考表面、实际表面、以及半自动折断线渡越功能和/或半自动平行操作功能的状况;以及b.)包括工具相对于折断线的位置和朝向的引导反馈。另选地,引导反馈可以提供视觉或声学辅助,以将工具的朝向、取向或姿势对准至折断线。
37、在一些实施方式中,输入接口包括触摸屏的输入区。输入区可以被配置成启用和停用半自动折断线渡越功能和/或半自动平行操作功能和/或引导反馈以及它们的相应选项。触摸屏可以由输出接口包括,并且可以显示折断线渡越功能和/或平行操作功能和/或引导反馈是否有效。根据本发明,借助于另一屏幕的输出区、通过led灯、或者通过其它可视另选方案的另选显示方法也是可能的。
38、输出接口还可以显示参考表面以及挖掘工具的姿势(特别是朝向)。输出接口可以显示其它信息,特别是关于实际表面的信息、挖掘任务的进展、挖掘机器相对于局部或全球参考系的位置、机器组件的健康状况。输出接口可以显示工具的当前和期望位置,输出接口还可以显示由计算单元计算的路径。不必说,输出接口可以不在给定时刻显示所有信息。被显示在输出接口上的信息可由操作员选择。输出接口可以包括触摸屏,其中,该触摸屏可以包括输入区。操作员可以使用输入区来选择要显示的信息。也可以利用另选输入装置。
39、在一些具体实施方式中,该组传感器包括至少一个定位传感器。输出接口还可以显示挖掘机的绝对位置。不必说,该组传感器可以包括定位传感器和扫描传感器两者。
40、本发明还涉及一种半自动折断线渡越的方法。所述方法包括以下步骤:1.)根据参考表面对准工具刃口;2.)基于特别是与工具的运动方向或速度有关的实际读取的操作员转向命令,并且基于工具相对于设计模型的折断线的实际参考位置和朝向,来识别折断线渡越移动;3.)基于工具相对于设计模型的实际参考位置和朝向并且基于实际读取的操作员转向命令,来生成操作员转向命令调整命令,以便a.)使工具刃口与折断线平行对准;以及b.)根据参考表面重定向工具刃口。
41、在一些实施方式中,将工具刃口沿垂直于折断线的运动方向进行转向。该操作员转向命令调整命令是基于工具相对于设计模型的实际参考位置和朝向并且基于实际读取的操作员转向命令来生成的,以便a.)使工具刃口与折断线平行对准;b.)根据参考表面重定向工具刃口;以及c.)使工具刃口沿垂直于折断线的运动方向移动。
42、在一些实施方式中,工具刃口在折断线处自动停止。在使工具刃口停止之后,操作员可以在不同的位置开始新的挖掘动作。操作员可以在对准工具之后继续渡越至第二多边形。输入接口被配置成启用在折断线处停止的功能。输出接口可以显示在折断线处停止的功能是否有效。
43、在一些实施方式中,将工具的运动方向自动对准至折断线处的第二多边形。在对准之后,工具可以在第二多边形中继续挖掘动作。这些实施方式是特别有利的,因为它们使得能够实现折断线的无缝渡越,而无需操作员的过度努力。
44、在一些实施方式中,在工具的对准期间不暂停工具的移动。这些实施方式是特别有利的,因为在这些实施方式中,对准过程不干扰挖掘任务。而且,它们还允许在工具的运动方向改变的同时保持工具对准。这对于更复杂的挖掘任务是特别有利的。控制器和/或操作员可以限制要在工具移动期间执行的对准的程度以保护工具。在工具移动期间仅允许某些类型的对准的其它实施方式也处于本发明的含义内。
45、另选地,工具刃口也可以以另一种方式来进行对准,其中,首先暂停工具的移动,执行工具的对准,以及在完成对准之后重新开始移动。工具可以在工具刃口接触折断线时被对准,如果优选朝向偏置(bias)以将残留物推到工具的给定侧,那么该实施方式是特别有利的。在该对准方法中,工具在没有朝向偏置的情况下不被转向。
46、本发明还涉及一种半自动平行操作的方法。所述方法包括以下步骤:1.)基于特别是与工具的运动方向或速度有关的实际读取的操作员转向命令,并且基于工具相对于设计模型的折断线的实际参考位置和朝向,来识别平行操作移动;2.)基于工具相对于设计模型的实际参考位置和朝向并且基于实际读取的操作员转向命令,来生成操作员转向命令调整命令,以便a.)根据参考表面来重定向工具刃口;b.)将工具刃口重定向到接触折断线的位置;以及c.)使工具刃口在参考表面中沿平行于折断线的方向移动。
47、平行操作的另选实施方式也是可能的。例如,可以将工具对准成使得该工具的运动方向和取向平行于折断线,同时该工具的位置处于预定义距离内。这种对准对于要以一定距离平行于折断线执行的挖掘任务可能是有用的,例如,挖掘平行于高速公路路堤的壕沟或者清理折断线的残留物。
48、而且,对于包括多于一个折断线的参考表面,可以将半自动折断线渡越方法和半自动平行操作方法组合。
49、本发明还涉及一种用于控制器的具体实施方式的计算机程序产品,该计算机程序产品在由计算单元执行时,使自动执行半自动折断线渡越方法的所选实施方式的步骤。
50、本发明还涉及一种用于控制器的具体实施方式的计算机程序产品,该计算机程序产品在由计算单元执行时,使自动执行半自动平行操作方法的所选实施方式的步骤。
- 还没有人留言评论。精彩留言会获得点赞!