一种水面垃圾收集机器人
本技术涉及机器人,尤其涉及一种水面垃圾收集机器人。
背景技术:
1、目前,水面垃圾清理大多是采用大型垃圾打捞船对水面垃圾进行收集,但这类水面垃圾清理设备的成本较高,且此类的水面垃圾清理设备需要人力操作和值守,存在用工成本高、效率低的问题。
2、因此,需要提供一种具有无人值守功能且成本较低的水面垃圾收集机器人,降低水面垃圾清理的成本,提高水面垃圾清理的效率。
技术实现思路
1、本实用新型实施例的目的是提供一种水面垃圾收集机器人,以实现降低水面垃圾清理的成本,提高水面垃圾清理的效率的目的。
2、为解决上述技术问题,本实用新型实施例提供如下技术方案:
3、本技术提供了一种水面垃圾收集机器人,包括:外桶,外桶的顶部设有进水豁口,外桶具有内隔板,内隔板将外桶的容纳腔分隔为上腔和下腔,内隔板上设有第一通孔,外桶的桶底设有第二通孔;水泵,水泵设置在下腔内,水泵的一端与第一通孔连通,水泵的另一端与第二通孔连通;浮动桶,浮动桶设置在内隔板上,浮动桶的桶底设有让位通孔;内桶支座,内桶支座穿过让位通孔设置在内隔板上,在内桶支座的外侧与外桶之间形成第一储水空间,在内桶支座的内侧形成第二储水空间,内桶支座底部设有使第一储水空间与第二储水空间连通的出水豁口;浮动桶的桶底位于第一储水空间内;内桶,内桶设置在内桶支座上,内桶底部设有与第二储水空间相连通的漏水孔;挡水件,挡水件设置在进水豁口处,挡水件延伸至浮动桶和内桶的上方,挡水件可在浮动桶的作用下关闭或打开进水豁口;浮筏组件,浮筏组件设置在外桶上;蓄电池,蓄电池设置在下腔内,蓄电池与水泵电连接;集成控制器,集成控制器设置在下腔内,集成控制器与蓄电池电连接,集成控制器与水泵信号连接;水位传感器,水位传感器设置在内桶内,用于检测内桶内的水位,水位传感器与蓄电池电连接,水位传感器与集成控制器信号连接。
4、进一步地,浮动桶的密度小于水的密度;浮动桶可在外桶上腔底部水的浮力下根据水位变化上下浮动;水面垃圾收集机器人还包括:浮动桶配重件,浮动桶的桶底的上表面设有环形凹槽,多个浮动桶配重件均布安装在环形凹槽内。
5、进一步地,水面垃圾收集机器人还包括:整体配重件,至少一个整体配重件设置在下腔内。
6、进一步地,外桶包括:外桶体,外桶体具有内隔板,外桶体上均布有多个外桶体外沿,相邻两个外桶体外沿之间形成有进水豁口,外桶体外沿高于进水豁口;外桶封底,外桶封底与外桶体螺纹连接,外桶封底具有第二通孔。
7、进一步地,水面垃圾收集机器人还包括:太阳能发电组件,太阳能发电组件设置在浮筏组件上,太阳能发电组件与蓄电池电连接。
8、进一步地,水面垃圾收集机器人还包括超声波传感器,设置在内桶的上方,用于检测内桶内的水位或用于检测内桶内垃圾的高度;超声波传感器与蓄电池电连接,超声波传感器与集成控制器信号连接;集成控制器设有定位与通讯模块、以及水位控制模块。
9、进一步地,浮筏组件包括:安装圈;浮筏体,浮筏体上设有弧形安装槽,浮筏体具有与外桶外壁相适配的圆弧形端面;浮筏体的密度小于水的密度;浮筏体通过弧形安装槽安装在安装圈上;多个浮筏体均布安装在安装圈上;
10、浮筏组件套装在外桶上,各浮筏体的圆弧形端面与外桶外壁贴合。
11、进一步地,挡水件的一端夹设在安装圈和外桶之间,挡水件的另一端搭设在外桶、浮动桶和内桶上;挡水件为多个,多个挡水件与多个进水豁口一一对应地设置;相邻两个浮筏体之间设有一个挡水件;挡水件由柔性材料制成。
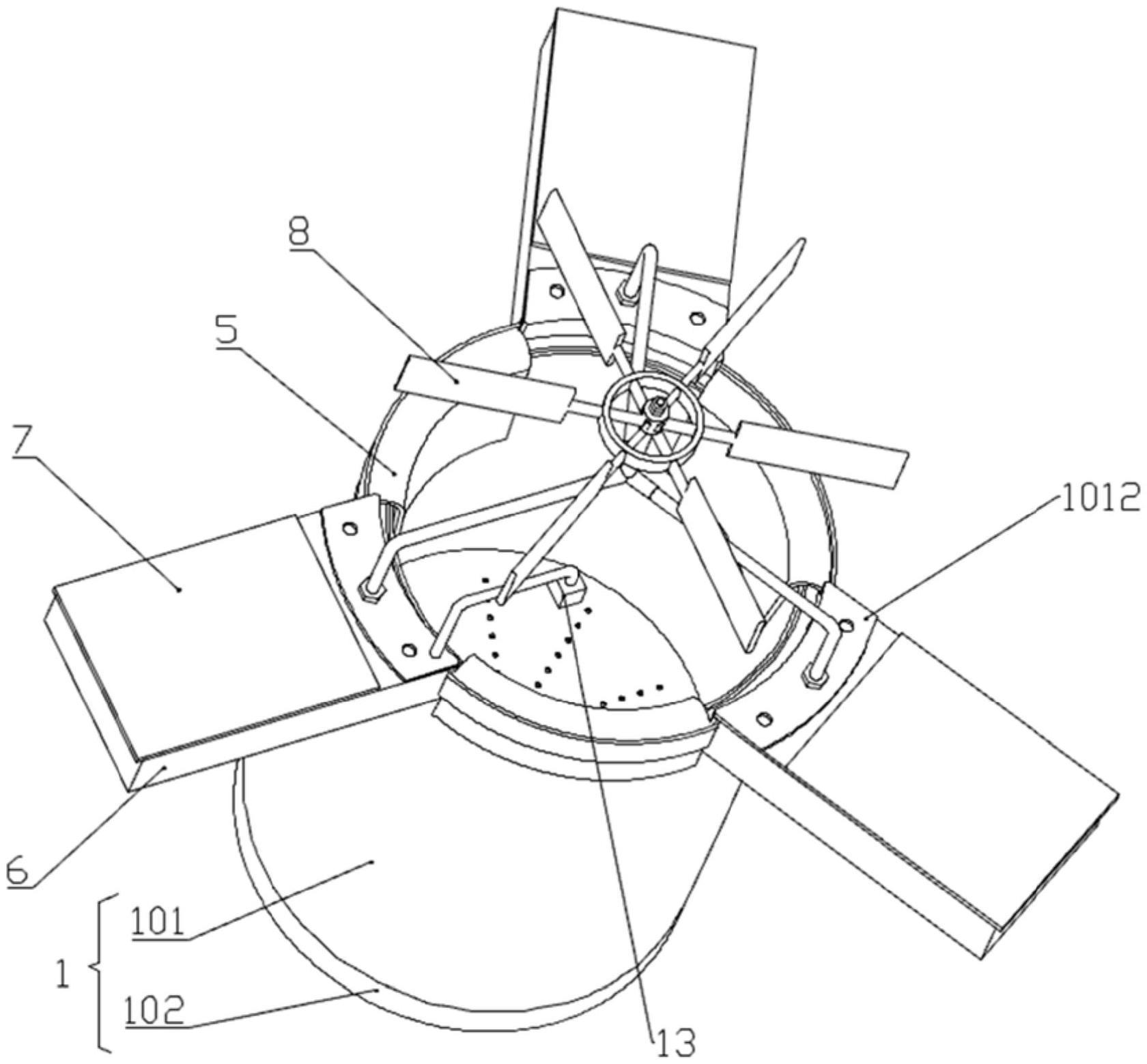
12、进一步地,水面垃圾收集机器人还包括:风帆组件,风帆组件设置在外桶的上方。
13、进一步地,风帆组件包括:支架,支架与外桶的外桶体外沿连接;安装轴,安装轴的一端与支架连接;
14、风帆架和轴承,风帆架通过轴承可转动地套设在安装轴的另一端;锁紧螺母,锁紧螺母安装在安装轴上,用于锁紧轴承和风帆架;其中,风帆架包括:外固定圈,外固定圈上设有多个安装孔;内固定圈,内固定圈设置在外固定圈内,内固定圈上设有多个安装凹槽;
15、多个风帆,风帆包括片状主体和安装柄,安装柄穿过安装孔插入安装凹槽;多个风帆、多个安装凹槽与多个安装孔一一对应设置;支架包括多个安装杆和一个多通管,多通管具有一个主管和多个支管;外桶具有多个外桶体外沿,多个外桶体外沿、多个支管与多个安装杆一一对应地设置;安装轴的一端与主管连接;安装杆的一端与支管连接,另一端通过固定螺母与外桶的外桶体外沿连接。
16、相较于现有技术,本实用新型提供的水面垃圾收集机器人,具有桶内水位自适应控制功能,以及具有桶内水位主动调节功能,从而使本技术提供的水面垃圾收集机器人具备无人值守功能,可以降低水面垃圾清理的成本,提高水面垃圾清理的效率。具体来说,通过利用外桶内水的浮力实现浮动桶的升降,浮动桶与挡水件的配合动作,实现进水豁口的开闭,进而控制外桶内外的液面之差,控制进水,进水时水面垃圾也跟随进水而进入内桶中,实现水面垃圾的收集,即实现了桶内水位自适应控制功能,实现垃圾自适应收集功能。水位传感器可以检测内桶内水的高度,当水位到达设定的高度时,集成控制器控制水泵开始运行,将水排出至外桶外,从而实现桶内水位主动调节功能。
17、此外,太阳能发电组件的设置可以在有太阳能时发电并将电能存储在蓄电池中,从而使本技术提供的水面垃圾收集机器人的续航能力更长,更加节能环保,实现能源自给自足。
18、超声波传感器的设置可以在桶内的水位持续超过上限时,通过集成控制器的定位与通讯模块向附近的信号监测站发送故障打捞信号,打捞人员可以根据水面垃圾收集机器人的位置就近打捞。
19、超声波传感器的设置还可以在桶内的垃圾堆积高度高于设定的垃圾堆积高度上限时,通过集成控制器的定位与通讯模块向附近的信号监测站发送垃圾已满打捞信号,打捞人员可以根据水面垃圾收集机器人的位置就近打捞。
20、当水面无风时,水面垃圾收集机器人随着水的流动而移动,水面垃圾也随着水的流动而移动,水面垃圾收集机器人的移动方向与水面垃圾的移动方向趋于一致,有利于水面垃圾收集机器人对水面垃圾的收集。
21、当水面有风时,风帆组件的设置,可以利用风能实现水面垃圾收集机器人对水面垃圾的自适应追踪功能,实现水面垃圾的高效收集。即风帆在风力的推动作用下旋转,同时带动机器人随风在水面移动,水面垃圾也会在风力的作用下移动,这样水面垃圾收集机器人的移动方向与水面垃圾的移动方向趋于一致,目的地也趋于一致,从而可以实现水面垃圾收集机器人自适应追踪水面垃圾的功能,提高水面垃圾收集效率。并且由于风帆组件的风帆架可绕安装轴旋转的设置,水面垃圾收集机器人在水面移动和旋转的速度降低,避免出现水面垃圾收集人移动过快导致的还未将水面垃圾收集进内桶就漂走的问题出现,从而更有利于水面垃圾的收集。
22、并且,如果是封闭水域,水面垃圾会最终向岸边停靠,水面垃圾收集机器人最终也有机会靠近岸边停靠,从而方便水面垃圾的收集和打捞人员打捞。
- 还没有人留言评论。精彩留言会获得点赞!