作业机械控制方法、系统、作业机械及设备与流程
本发明涉及作业机械控制,尤其涉及一种作业机械控制方法、系统、作业机械及设备。
背景技术:
1、作业机械一般通过往复运动进行工况作业的完成,例如,装载机、挖掘机等。例如,装载机主要通过往复的装卸料过程进行土壤、砂石、石灰、煤炭等散状物料的铲装;挖掘机主要通过往复的挖掘和搬运过程进行土壤、砂石、石灰、煤炭等散状物料的铲装。
2、现有技术通过控制作业机械的作业机构完成铲装操作,例如,通过控制装载机的铲斗或动臂举升或下降至固定角度,以完成装料或卸料操作。但是,作业机械在作业时,作业工况并不是一成不变的,例如,装载机的铲斗举升或下降的角度会随工况的变化随时发生变化。
3、因此,如何控制作业机械的作业机构根据工况进行任意调整是目前业界亟待解决的重要课题。
技术实现思路
1、本发明实施例提供一种作业机械控制方法、系统、作业机械及设备,用以解决现有技术中只能控制移动到固定位置的缺陷,实现根据作业工况控制作业机械的作业机构移动到任意位置。
2、本发明实施例提供一种作业机械控制方法,包括:
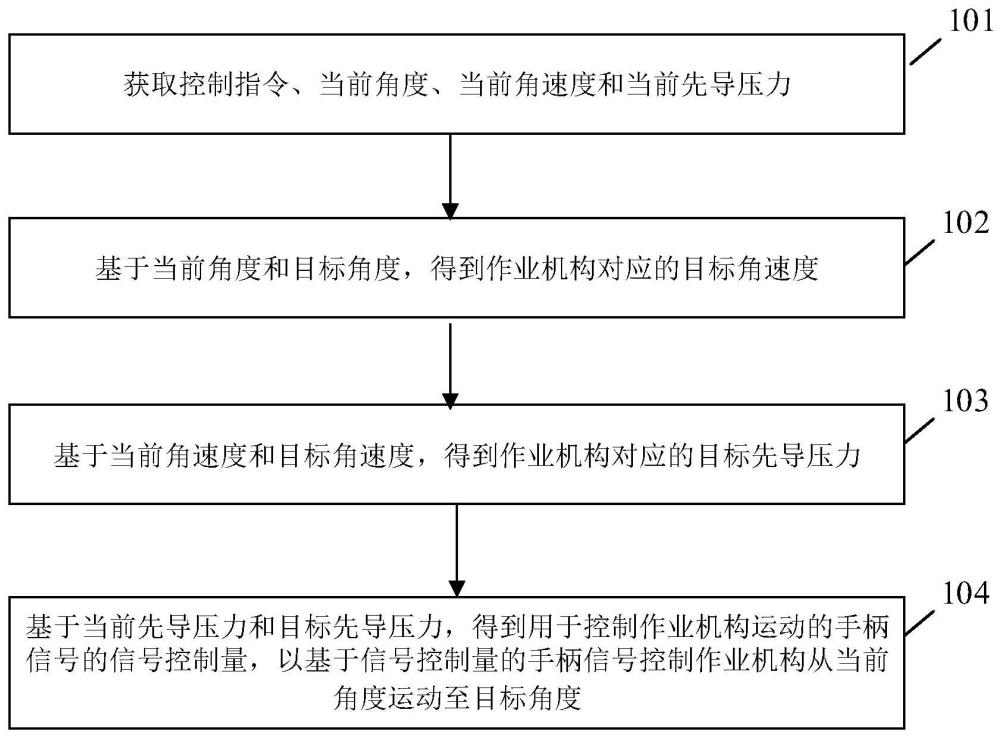
3、获取控制指令、当前角度、当前角速度和当前先导压力,其中,所述控制指令包括:所述作业机械的作业机构以及所述作业机构对应的目标角度,角度基于所述作业机构对应的平面和水平面确定;
4、基于所述当前角度和所述目标角度,得到所述作业机构对应的目标角速度;
5、基于所述当前角速度和所述目标角速度,得到所述作业机构对应的目标先导压力;
6、基于所述当前先导压力和所述目标先导压力,得到用于控制所述作业机构运动的手柄信号的信号控制量,以基于所述信号控制量的手柄信号控制所述作业机构从所述当前角度运动至所述目标角度。
7、根据本发明一个实施例的作业机械控制方法,所述基于所述当前角度和所述目标角度,得到所述作业机构对应的目标角速度,包括:
8、计算所述当前角度和所述目标角度的角度差值;
9、基于所述角度差值,确定所述目标角速度。
10、根据本发明一个实施例的作业机械控制方法,所述基于所述当前角速度和所述目标角速度,得到所述作业机构对应的目标先导压力之前,还包括:
11、确定第一预测模型的第一集总干扰参数的估计值,其中,所述第一集总干扰参数的估计值用于指示所述第一预测模型得到目标先导压力的准确度;
12、所述基于所述当前角速度和所述目标角速度,得到所述作业机构对应的目标先导压力,包括:
13、将所述当前角速度、所述目标角速度和所述第一集总干扰参数的估计值输入所述第一预测模型,得到所述第一预测模型输出的所述目标先导压力;
14、其中,所述第一预测模型基于当前角速度样本、目标角速度样本、所述第一集总干扰参数的估计值样本和先导压力样本训练得到。
15、根据本发明一个实施例的作业机械控制方法,所述基于所述当前先导压力和所述目标先导压力,得到用于控制所述作业机构运动的手柄信号的信号控制量之前,还包括:
16、确定第二预测模型的第二集总干扰参数的估计值,其中,所述第二集总干扰参数的估计值用于指示所述第二预测模型得到手柄信号的信号控制量的准确度;
17、所述基于所述当前先导压力和所述目标先导压力,得到用于控制所述作业机构运动的手柄信号的信号控制量,包括:
18、将所述当前先导压力、所述目标先导压力和所述第二集总干扰参数的估计值输入所述第二预测模型,得到所述第二预测模型输出的实时手柄信号的信号控制量;
19、其中,所述第二预测模块基于当前先导压力、目标先导压力、第二集总干扰参数的估计值样本和手柄信号的信号控制量样本训练得到。
20、本发明实施例还提供一种作业机械控制系统,包括:信号获取模块、第一控制器、第二控制器和第三控制器;
21、所述信号获取模块,用于获取控制指令、当前角度、当前角速度和当前先导压力,其中,所述控制指令包括:所述作业机械的作业机构以及所述作业机构对应的目标角度,角度基于所述作业机构对应的平面和水平面确定;
22、所述第一控制器,用于基于所述信号获取模块输出的所述当前角度和所述目标角度,得到所述作业机构对应的目标角速度;
23、所述第二控制器,用于基于所述信号获取模块输出的所述当前角速度,以及所述第一控制器输出的所述目标角速度,得到所述作业机构对应的目标先导压力;
24、所述第三控制器,用于基于所述信号获取模块输出的所述当前先导压力,以及所述第二控制器输出的所述目标先导压力,得到用于控制所述作业机构运动的手柄信号的信号控制量,并将所述信号控制量传输给所述作业机械的手柄,以基于所述信号控制量的手柄信号控制所述作业机构从所述当前角度运动至所述目标角度。
25、根据本发明一个实施例的作业机械控制系统,所述第一控制器、所述第二控制器和所述第三控制器串联连接;
26、所述第一控制器连接所述第二控制器,所述第二控制器连接所述第三控制器。
27、根据本发明一个实施例的作业机械控制系统,所述系统还包括:第一抗扰控制器;
28、所述第一抗扰控制器和所述第二控制器连接;
29、所述第一抗扰控制器,用于确定所述第二控制器中的第一预测模型的第一集总干扰参数的估计值,并将所述第一集总干扰参数的估计值传输给所述第二控制器;其中,所述第一集总干扰参数的估计值用于指示所述第一预测模型得到目标先导压力的准确度;
30、所述第二控制器,用于将所述当前角速度、所述目标角速度和所述第一集总干扰参数的估计值输入所述第一预测模型,得到所述第一预测模型输出的所述目标先导压力;其中,所述第一预测模型基于当前角速度样本、目标角速度样本、所述第一集总干扰参数的估计值样本和先导压力样本训练得到。
31、根据本发明一个实施例的作业机械控制系统,所述系统还包括:第二抗扰控制器;
32、所述第二抗扰控制器和所述第三控制器连接;
33、所述第二抗扰控制器,用于确定所述第三控制器中的第二预测模型的第二集总干扰参数的估计值,并将所述第二集总干扰参数的估计值传输给所述第三控制器;其中,所述第二集总干扰参数的估计值用于指示所述第二预测模型得到手柄信号的信号控制量的准确度;
34、所述第三控制器,用于将所述当前先导压力、所述目标先导压力和所述第二集总干扰参数的估计值输入所述第二预测模型,得到所述第二预测模型输出的实时手柄信号的信号控制量;其中,所述第二预测模块基于当前先导压力、目标先导压力、第二集总干扰参数的估计值样本和手柄信号的信号控制量样本训练得到。
35、本发明实施例还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上任一实施例所述的作业机械控制方法的步骤。
36、本发明实施例还提供一种作业机械,用于实现如上任一实施例所述的作业机械控制方法的步骤。
37、本发明实施例提供的作业机械控制方法、系统、作业机械及设备,通过获取作业机械的作业机构的当前角度、当前角速度、当前先导压力和目标角度;按照串级计算方式,基于当前角度和目标角度,得到作业机构对应的目标角速度;基于当前角速度和目标角速度,得到作业机构对应的目标先导压力;基于当前先导压力和目标先导压力,得到用于控制作业机构运动的手柄信号的信号控制量,进而基于信号控制量的手柄信号控制作业机构从当前角度运动至目标角度,可见,在作业机械作业时,无论何种作业工况或者作业机构处于何种状态(对应当前角度),均能控制作业机构到任意位置(对应目标角度)(即可通过基于获得的参数,通过串级计算,得到将作业机构从当前角度调整至目标角度对应的手柄信号的信号控制量),实现了能够控制作业机械的作业机构移动到任意位置。
- 还没有人留言评论。精彩留言会获得点赞!