一种智能深水清淤装置及方法与流程
本技术涉及箱体所处的高度的,具体涉及一种智能深水清淤装置及方法。
背景技术:
1、我国江河大多含沙量高,在河流上修建水库后,水位抬高,流速降低,必然导致泥沙在水库中淤积。我国现有水库经过几十年运行,普遍存在不同程度的淤积。水库淤积会产生一系列问题:导致库容损失,降低水库防洪和兴利效益;抬高回水位、增加水库淹没损失;坝前堆淤影响工程正常和安全运行;清水下泄引起下游河道冲刷;污染物随泥沙淤积沉淀污染水质等。因此,水库淤积严重影响水库防洪安全、运行安全、生态安全,是水库运行管理中亟待解决的重要问题。
2、针对不同性质的水库,泥沙、颗粒物、污染物在河湖库中产生的问题是有差异,应用的处理技术与设备既存在共性,同时也具备差异性。长江黄河支流上的水库(湖泊型水库)大多具有饮用水供水功能、底泥的淤积和污染会产生饮水安全问题。“淤污”型湖泊型水库底泥释放污染都集中在10-20cm的表层,必须精准确定释放污染物的范围和释放层位,进行“精确、薄层、低扰动、高浓度”的清淤。但是目前现有清淤装备的气力泵吸口为固定开口,无法实现薄层污染层的清淤控制,从而降低的清淤效率。
技术实现思路
1、本技术提供一种智能深水清淤装置及方法,能够根据淤泥情况调整吸入口面积,以实现精准清淤,提高清淤效率。
2、在本技术的第一方面提供了一种智能深水清淤方法,所述方法应用于清淤装置,所述清淤装置包括箱体、马达、主轴、叶片、液压缸、箱罩;
3、所述箱体的两个侧边分别固定设置有一个所述马达,两个所述马达的转轴固定连接于所述主轴,所述主轴设置有叶片;
4、所述液压缸的缸筒与所述箱体固定连接,所述液压缸的活塞杆与所述箱罩活动连接,所述箱罩与所述箱体铰接;
5、所述方法包括:
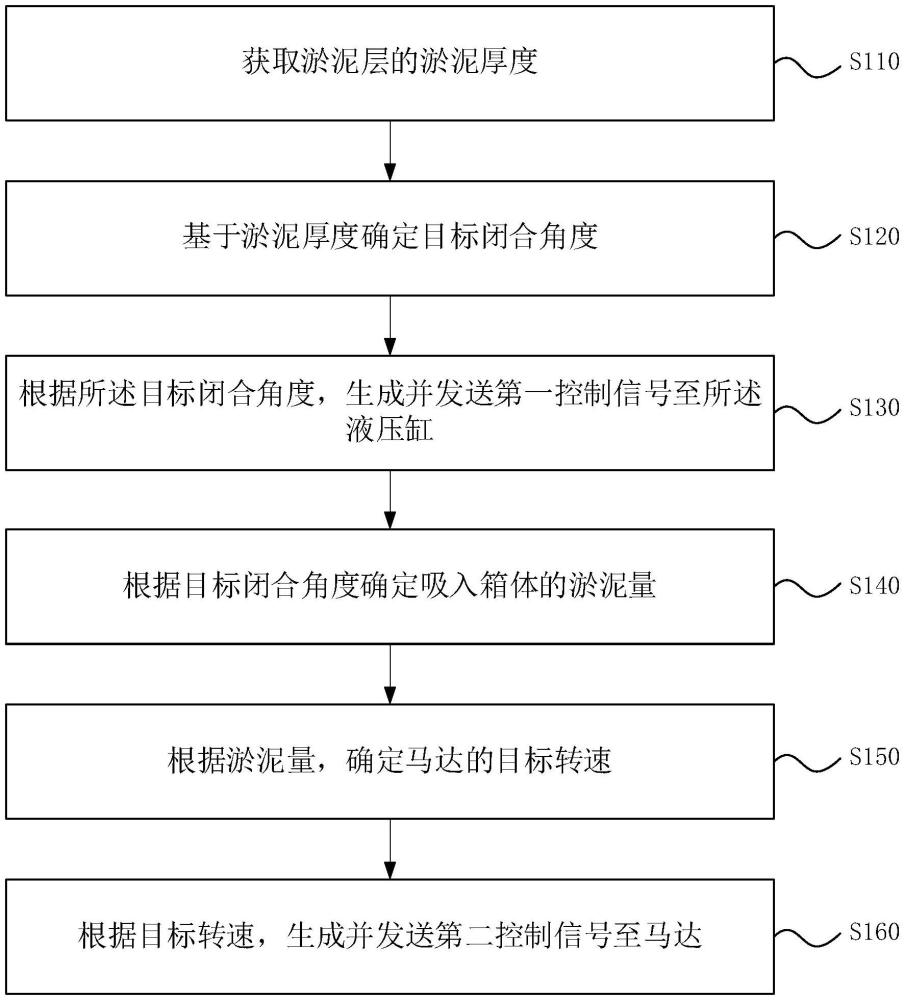
6、获取淤泥层的淤泥厚度;
7、基于所述淤泥厚度确定目标闭合角度;
8、根据所述目标闭合角度,生成并发送第一控制信号至所述液压缸,以使所述液压缸的活塞杆带动所述箱罩绕所述箱体闭合,并使所述箱罩与所述箱体的闭合角度为所述目标闭合角度;
9、根据所述目标闭合角度确定吸入所述箱体的淤泥量;
10、根据所述淤泥量,确定所述马达的目标转速;
11、根据所述目标转速,生成并发送第二控制信号至所述马达,以使所述马达以所述目标转速带动所述叶片转动,从而对所述箱体的淤泥进行破碎。
12、可选的,所述基于所述淤泥厚度确定目标闭合角度,具体包括:
13、获取淤泥层的淤泥物理特性;
14、获取预设非线性模型的计算系数;
15、将所述计算系数带入非线性方程,根据所述淤泥物理特性以及所述淤泥厚度,计算所述目标闭合角度。
16、可选的,所述根据所述目标闭合角度,生成并发送第一控制信号至所述液压缸,具体包括:
17、根据所述液压缸的伸缩量,确定所述箱罩与所述箱体的当前闭合角度;
18、根据所述当前闭合角度以及所述目标闭合角度,确定角度偏差;
19、基于所述角度偏差,计算pid控制信号,得到所述第一控制信号,所述第一控制信号的表达式如下:
20、
21、其中,u为所述第一控制信号,kp为比例增益常数,ki为积分增益常数,kd为微分增益常数,δθ为所述角度偏差。
22、可选的,所述根据所述目标闭合角度确定吸入所述箱体的淤泥量,具体包括:
23、根据所述目标闭合角度,确定淤泥吸入口的吸入面积;
24、获取测量的所述淤泥层的淤泥密度以及水下深度;
25、根据所述吸入面积、水下深度以及所述淤泥密度,计算得到所述淤泥量。
26、可选的,所述清淤装置还包括卷扬机,所述卷扬机设置于清淤船,所述卷扬机通过钢丝绳与所述箱体连接;
27、在所述根据所述目标转速,生成并发送第二控制信号至所述马达之后,所述方法还包括:
28、根据所述钢丝绳的长度,确定所述箱体所处的高度;
29、若判断出所述箱体所处的高度不存在淤泥,则通过所述卷扬机调整所述钢丝绳的长度,以降低所述箱体的高度;或者,
30、若判断出所述箱体所处的高度不存在淤泥,则根据所述清淤船当前的第一行驶速度,确定第二行驶速度,以使所述清淤船行驶调整所述箱体的位置,其中,所述第二行驶速度大于所述第一行驶速度。
31、在本技术的第二方面提供了一种智能深水清淤装置,所述清淤装置包括箱体、马达、主轴、叶片、液压缸、箱罩,其中:
32、所述箱体的两个侧边分别固定设置有一个所述马达,两个所述马达的主轴固定连接于所述主轴,所述主轴设置有叶片;
33、所述液压缸的缸筒与所述箱体固定连接,所述液压缸的活塞杆与所述箱罩活动连接,所述箱罩与所述箱体铰接。
34、可选的,所述清淤装置还包括挡板,所述挡板设置于所述箱体内侧;
35、所述挡板与所述箱体铰接,以使所述箱体吸入淤泥时,所述挡板打开所述箱体与所述箱罩组成的吸入口,所述箱体排出淤泥时所述挡板堵住所述吸入口。
36、可选的,所述清淤装置还包括气力泵;
37、所述气力泵设置于所述箱体,用于将淤泥吸出所述箱体。
38、可选的,所述清淤装置还包括多个导流侧板,所述导流侧板设置于所述箱罩;
39、所述箱罩的第一侧边与第二侧边设置有相同数量的多个所述导流侧板,且所述第一侧边的多个导流侧板的设置方向相同,所述第二侧边的多个导流侧板的设置方向相同,所述第一侧边为所述箱罩的任意一个侧边,所述第二侧边为所述箱罩除所述第一侧边外的一个侧边。
40、可选的,所述清淤装置还包括多个吸口格栅以及多个刮刀,多个所述吸口格栅设置于所述箱体,多个所述刮刀设置于所述主轴;
41、所述刮刀与所述吸口格栅一一对应设置,所述主轴带动所述刮刀转动,以将所述吸口格栅的障碍物拨开。
42、综上所述,本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
43、1.本技术能够根据淤泥层厚度调整吸入口的开合角度,从而控制吸入口的面积,实现精准清淤。这是通过获取淤泥层的厚度信息,并通过计算确定箱罩与箱体的闭合角度来调整吸入口的面积。液压缸带动箱罩的闭合程度可以灵活调节,使得吸入口根据不同的淤泥情况动态变化,精准吸入适量的淤泥。同时,根据吸入口面积和淤泥量调整马达的转速,实现对淤泥的有效破碎和处理,从而提高清淤效率并降低能源消耗。
44、2.本技术通过引入淤泥物理特性和非线性模型计算系数,结合淤泥厚度,精准计算出目标闭合角度。这样能够针对不同淤泥层的物理特性(如密度、黏度等)动态调整吸入口的开合角度,确保在不同淤泥条件下都能实现最优的吸入效果。总之提高了清淤装置的适应性和控制精度,从而优化清淤效率,减少不必要的能耗和设备磨损。
45、3.通过pid控制方法,根据液压缸的伸缩量实时调整箱罩的闭合角度。通过计算当前闭合角度与目标闭合角度之间的偏差,生成精准的控制信号来调整液压缸的动作。pid控制结合比例、积分和微分调节器,确保清淤装置在响应过程中既能迅速调整角度,又能减少误差和振荡,使得箱罩的闭合更加平稳、准确,提升了清淤过程的控制精度和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!