破碎工况识别方法、装置及电子设备与流程
本技术涉及工程机械领域,尤其涉及一种破碎工况识别方法、装置及电子设备。
背景技术:
1、挖掘机是一种广泛应用于土方工程、建筑、矿山开发和其他工程作业的重型机械设备,可以执行多种任务,例如挖土、铲料、填土、打桩等。当挖掘机在执行破碎作业时,通常配备有破碎锤等附件,用于对坚硬材料(如混凝土、岩石等)进行破碎和拆除。识别挖掘机的破碎工况有助于监控设备状态,从而优化作业流程,提升作业效率。
2、相关技术中一般通过采集工况数据并与阈值比对相结合的方式判断破碎工况,包括:(1)基于挖掘机泵的压力差识别破碎工况:该方法通过传感器采集主泵ⅰ和主泵ⅱ的压力值,计算其压差,并判断该压差是否大于压差界值来识别破碎模式。(2)手柄信号识别破碎工况:通过传感器获取设备运行时手柄的先导压力信号,当破碎信号值存在大于第一阈值的情况时,则判定为破碎工况。
3、然而上述过程依靠单一传感器采集数据,且不同品牌、型号的挖掘机在动作、控制逻辑、配置参数上具有差异,导致存在误判的可能性。
技术实现思路
1、本技术实施例提供一种破碎工况识别方法、装置及电子设备,用以达到提高识别破碎工况的准确性,防止误判的效果。
2、第一方面,本技术实施例提供一种破碎工况识别方法,包括:
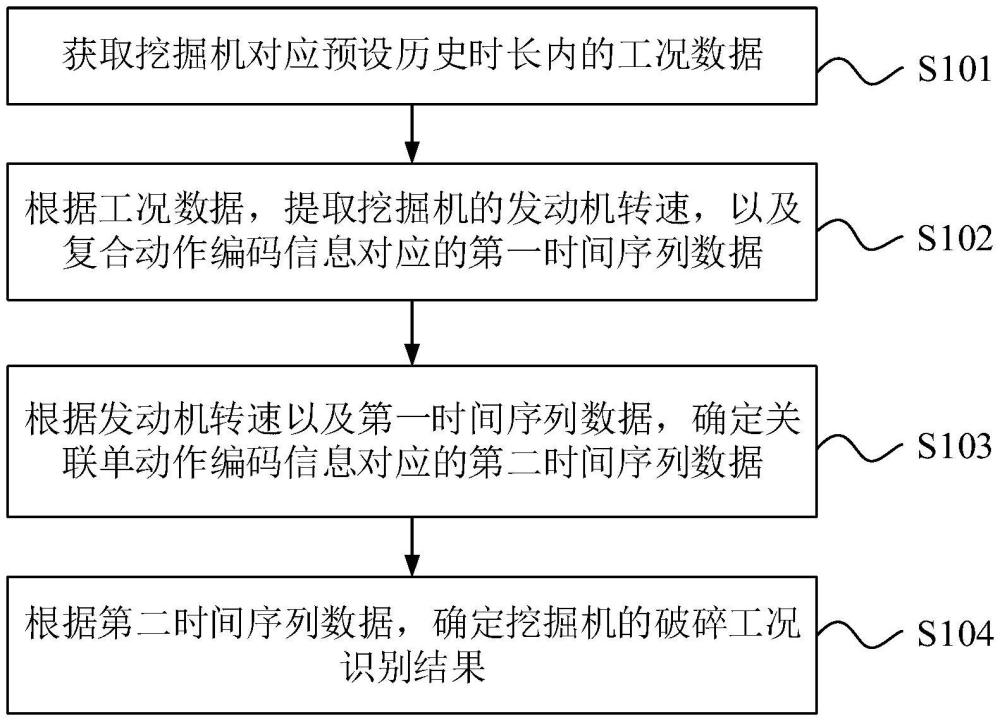
3、获取挖掘机对应预设历史时长内的工况数据;
4、根据工况数据,提取挖掘机的发动机转速,以及复合动作编码信息对应的第一时间序列数据,复合动作编码信息为对复合动作中的单动作进行编码得到的信息;
5、根据发动机转速以及第一时间序列数据,确定关联单动作编码信息对应的第二时间序列数据,关联单动作为与破碎工况相关的单动作;
6、根据第二时间序列数据,确定挖掘机的破碎工况识别结果。
7、在一种可能的实施方式中,根据第二时间序列数据,确定挖掘机的破碎工况识别结果,包括:
8、根据第二时间序列数据,确定单位时间内目标单动作编码信息中关联单动作编码信息的第一数量比例;
9、根据第一数量比例以及关联单动作的动作数量,确定挖掘机的破碎工况识别结果。
10、在一种可能的实施方式中,根据第一数量比例以及关联单动作的动作数量,确定挖掘机的破碎工况识别结果,包括:
11、若关联单动作的动作数量为1,且第一数量比例大于第一比例阈值,确定挖掘机的破碎工况识别结果为挖掘机在单位时间内为破碎工况;
12、若关联单动作的动作数量大于1,针对各关联单动作,分别确定单位时间内各个关联单动作编码信息对应的第二数量比例;若存在大于第二比例阈值的第二数量比例,且存在大于第三比例阈值的第二数量比例,确定挖掘机的破碎工况识别结果为挖掘机在执行对应关联单动作的单位时间内为破碎工况,其中,第二比例阈值小于第一比例阈值,第三比例阈值小于第二比例阈值。
13、在一种可能的实施方式中,针对各关联单动作,分别确定单位时间内各个关联单动作编码信息对应的第二数量比例,包括:
14、确定单位时间内目标单动作编码信息的动作数量;
15、若目标单动作编码信息的动作数量大于预设的数量阈值,针对各关联单动作,分别确定单位时间内各个关联单动作编码信息对应的第二数量比例。
16、在一种可能的实施方式中,根据发动机转速以及第一时间序列数据,确定关联单动作编码信息对应的第二时间序列数据,包括:
17、根据预设的发动机转速阈值,对发动机转速进行筛选,确定目标发动机转速;
18、在第一时间序列数据中,提取对应目标发动机转速对应时刻的目标复合动作编码信息;
19、根据目标复合动作编码信息,确定关联单动作编码信息对应的第二时间序列数据。
20、在一种可能的实施方式中,根据目标复合动作编码信息,确定关联单动作编码信息对应的第二时间序列数据,包括:
21、根据挖掘机的破碎锤管路中的阀芯,确定连接阀芯对应的目标单动作;
22、在目标复合动作编码信息中,根据目标单动作,确定关联单动作编码信息对应的第二时间序列数据。
23、在一种可能的实施方式中,方法还包括:
24、若目标发动机转速的数据记录量大于预设的数据记录量阈值,确定挖掘机在目标发动机转速对应的单位时间内进行实际工作,并确定挖掘机进行实际工作的第一单位时间数量;
25、确定挖掘机在单位时间内为破碎工况的第二单位时间数量;
26、若第二单位时间数量占第一单位时间数量的比例大于预设的比例阈值,确定挖掘机在预设历史时长内为破碎工况。
27、在一种可能的实施方式中,根据工况数据,提取挖掘机的发动机转速,以及复合动作编码信息对应的第一时间序列数据,包括:
28、根据工况数据,确定复合动作中的单动作以及单动作对应的二进制编码;
29、根据单动作以及单动作对应的二进制编码,确定复合二进制编码;
30、对复合二进制编码进行转换,得到复合动作编码信息对应的第一时间序列数据。
31、第二方面,本技术实施例提供一种破碎工况识别装置,包括:
32、获取模块,用于获取挖掘机对应预设历史时长内的工况数据;
33、提取模块,用于根据工况数据,提取挖掘机的发动机转速,以及复合动作编码信息对应的第一时间序列数据,复合动作编码信息为对复合动作中的单动作进行编码得到的信息;
34、第一确定模块,用于根据发动机转速以及第一时间序列数据,确定关联单动作编码信息对应的第二时间序列数据,关联单动作为与破碎工况相关的单动作;
35、第二确定模块,用于根据第二时间序列数据,确定挖掘机的破碎工况识别结果。
36、在一种可能的实施方式中,第二确定模块,具体用于:
37、根据第二时间序列数据,确定单位时间内目标单动作编码信息中关联单动作编码信息的第一数量比例;
38、根据第一数量比例以及关联单动作的动作数量,确定挖掘机的破碎工况识别结果。
39、在一种可能的实施方式中,第二确定模块,还用于:
40、若关联单动作的动作数量为1,且第一数量比例大于第一比例阈值,确定挖掘机的破碎工况识别结果为挖掘机在单位时间内为破碎工况;
41、若关联单动作的动作数量大于1,针对各关联单动作,分别确定单位时间内各个关联单动作编码信息对应的第二数量比例;若存在大于第二比例阈值的第二数量比例,且存在大于第三比例阈值的第二数量比例,确定挖掘机的破碎工况识别结果为挖掘机在执行对应关联单动作的单位时间内为破碎工况,其中,第二比例阈值小于第一比例阈值,第三比例阈值小于第二比例阈值。
42、在一种可能的实施方式中,第二确定模块,还用于:
43、确定单位时间内目标单动作编码信息的动作数量;
44、若目标单动作编码信息的动作数量大于预设的数量阈值,针对各关联单动作,分别确定单位时间内各个关联单动作编码信息对应的第二数量比例。
45、在一种可能的实施方式中,第一确定模块,具体用于:
46、根据预设的发动机转速阈值,对发动机转速进行筛选,确定目标发动机转速;
47、在第一时间序列数据中,提取对应目标发动机转速对应时刻的目标复合动作编码信息;
48、根据目标复合动作编码信息,确定关联单动作编码信息对应的第二时间序列数据。
49、在一种可能的实施方式中,第一确定模块,还用于:
50、根据挖掘机的破碎锤管路中的阀芯,确定连接阀芯对应的目标单动作;
51、在目标复合动作编码信息中,根据目标单动作,确定关联单动作编码信息对应的第二时间序列数据。
52、在一种可能的实施方式中,第一确定模块,还用于:
53、若目标发动机转速的数据记录量大于预设的数据记录量阈值,确定挖掘机在目标发动机转速对应的单位时间内进行实际工作,并确定挖掘机进行实际工作的第一单位时间数量;
54、确定挖掘机在单位时间内为破碎工况的第二单位时间数量;
55、若第二单位时间数量占第一单位时间数量的比例大于预设的比例阈值,确定挖掘机在预设历史时长内为破碎工况。
56、在一种可能的实施方式中,提取模块,具体用于:
57、根据工况数据,确定复合动作中的单动作以及单动作对应的二进制编码;
58、根据单动作以及单动作对应的二进制编码,确定复合二进制编码;
59、对复合二进制编码进行转换,得到复合动作编码信息对应的第一时间序列数据。
60、第三方面,本技术实施例提供一种电子设备,包括:存储器,处理器;
61、存储器存储计算机执行指令;
62、处理器执行存储器存储的计算机执行指令,使得处理器执行如上第一方面和/或第一方面各种可能的实施方式。
63、第四方面,本技术实施例提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,计算机执行指令被处理器执行时用于实现如上第一方面和/或第一方面各种可能的实施方式。
64、第五方面,本技术实施例提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如上第一方面和/或第一方面各种可能的实施方式。
65、本技术实施例提供的破碎工况识别方法、装置及电子设备,通过获取挖掘机在一段预设历史时长内的工况数据,然后在工况数据中提取出发动机转速和与挖掘机设备的复合动作对应的编码信息,得到复合动作编码信息对应的第一时间序列数据,进而根据发动机转速和第一时间序列数据,分析与破碎工况相关的单动作,得到关联单动作编码信息对应的第二时间序列数据,最后基于第二时间序列数据进行综合判断,确定挖掘机是否处于破碎工况的手段,一方面,通过综合使用发动机转速、复合动作编码信息等多个维度的数据来判断破碎工况,可以克服单一传感器可能存在的误差问题,另一方面,通过多重数据验证和基于历史工况的关联单动作编码信息对应的时间序列数据分析,能够更精确地捕捉到与破碎工况相关的具体动作,进而通过这些精确的动作特征来识别是否为破碎工况,可以准确地识别破碎工况,减少因设备配置差异、传感器精度不足等因素造成的误判。
- 还没有人留言评论。精彩留言会获得点赞!