一种城市管道工程智能化开挖施工设备及施工方法与流程
本发明属于城市管道工程,特别是涉及一种城市管道工程智能化开挖施工设备及施工方法。
背景技术:
1、随着城市建设的迅速发展,地下管网的建设和完善变得尤为重要,城市道路的狭窄以及日益密集的行车和人流量使得城市管道施工面临诸多挑战和安全隐患,具体表现为城市的道路使用频率较高,城市道路的施工对于城市道路的使用必定会产生影响,在此环境中需要分析以及多方面考虑,尽可能的减少对于城市正常运作的限制,相应的缩短施工周期,提高施工效率以及施工质量。
2、然而,在给城市管道开槽施工时需根据沟槽开挖深度、宽度、地质条件以及周边环境特点等情况选取合适的开挖及支护方式,在进行开挖管沟时,通常管沟的机械开挖方式大多为挖掘机开挖,通过控制挖掘机的铲头对地进行挖掘,来获得管沟,采用挖掘机开挖时,占用城市道路可用的面积,极大的影响了城市道路正常运作,也带来极大的安全隐患,更不能一次性挖掘出管沟;同时管沟开挖完成后,因受施工环境限制,施工上空或者周边具有电缆时,无法使用大型机械安装钢板桩,此时需要人工安装,未支护沟槽易垮塌,给人工安装带来隐患,垮塌后需要二次返工也导致施工效率低、周期长等问题;此外,目前尚未有针对城市管道开挖支护一体化专用施工设备,制约了城市管道开挖支护施工机械化、智能化、环保化的程度。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明的目的在于提供一种城市管道工程智能化开挖施工设备及施工方法,用于解决现有技术中未有针对城市管道开挖支护一体化专用施工设备的问题。
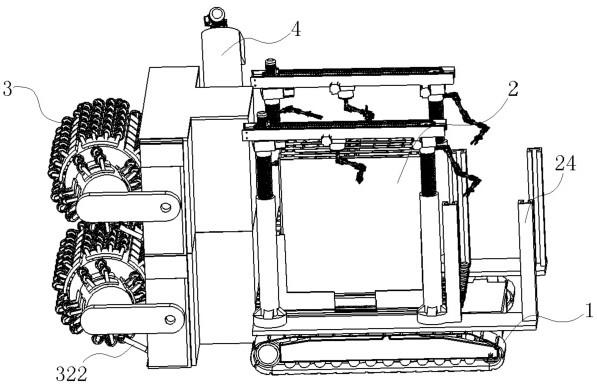
2、为实现上述目的及其他相关目的,本发明提供一种城市管道工程智能化开挖施工设备,包括:
3、行走装置,所述行走装置包括行走机构、设于所述行走机构左右两端上方的抓取伸缩机构;
4、支护装置,所述支护装置包括复数个支护机构、多个支撑机构、复数个设于所述行走机构上方用于分别夹持所述支护机构的夹持机构、四个用于放置多个所述支撑机构的竖置架,所述支撑机构将管沟宽度方向两侧的支护机构支撑连接;
5、多个开挖装置,多个所述开挖装置竖向布置于所述行走机构前端,所述开挖装置包括固接于所述行走机构前端的横调机构、两组分别铰接于所述横调机构左右两端的边撑机构、开挖机构、两组分别铰接于所述横调机构上的中撑机构,所述开挖机构转动连接于两组所述边撑机构之间;
6、所述开挖机构包括转动设于两组所述中撑机构之间的辊轴、多个第一开挖组件、同轴固定配合在所述辊轴上的中空滚筒、对称设于所述辊筒两端的第二开挖组件、驱动所述辊轴转动的开挖动力组件,所述中空滚筒内壁与所述辊轴外壁之间形成调节空间,多个所述第一开挖组件沿所述辊轴轴向布置且均位于所述调节空间内,多个所述第一开挖组件、两个所述第二开挖组件和所述边撑机构配合能挖掘不同宽度和高度管沟;
7、螺旋输送机构,所述螺旋输送机构用于将所述开挖装置挖掘土体输送出管沟。
8、可选地,所述第一开挖组件包括同轴固定配合于所述辊轴上的固定盘、与所述辊轴同轴固定配合的第一齿轮、多个滑动杆、多个分别垂直固接于所述滑动杆一端的推动杆、多个分别与所述滑动杆另一端固接的弧形块,所述第一齿轮侧面上具有与所述推动杆数量相等且滑动配合的弧形槽,所述滑动杆与所述弧形块数量相等且一一对应,所述中空滚筒和所述固定盘侧面周向上均具有多个分别与所述滑动杆滑动配合的滑动槽,每个所述弧形块上均布置有多个滚刀,驱动多个所述第一开挖组件上的多个所述第一齿轮同时转动的调节动力组件;
9、所述调节动力组件包括调节直线动力件、多个第二齿轮、调节轴、垂直且固接于所述调节轴上的转臂,所述第二齿轮与所述第一齿轮数量相等且啮合传动,多个所述第二齿轮均与所述调节轴同轴固定配合,所述调节直线动力件固定端和伸缩端分别与所述调节空间内壁和所述转臂铰接,所述调节轴与每个所述固定盘转动连接。
10、可选地,所述辊轴两端均开设有盲孔;
11、每个所述第二开挖组件包括固定端固接于所述盲孔底部的横向伸缩动力件、一端与所述横向伸缩动力件伸缩端固定连接的中空伸出筒、向所述行走机构后端倾斜设置的转筒、多组沿所述中空伸出筒轴向布置的第一开挖部、多组所述转筒轴向布置的第二开挖部、转动连接部,所述转筒一端通过所述转动连接部与所述中空伸出筒另一端同轴固定连接,另一端通过万向轴与所述边撑机构转动连接,所述盲孔侧壁沿自身轴向具有多个轴槽,所述中空伸出筒与所述横向伸缩动力件连接的一端周向上具有多个与所述轴槽滑动配合的传递块;
12、所述第一开挖部和所述第二开挖部结构相同;
13、所述第一开挖部包括多个沿所述中空伸出筒周向间隔布置的开挖模块,每个开挖模块包括四个第一伸缩臂和弧形条,四个第一伸缩臂呈矩形结构设置且一端均与所述中空伸出筒侧壁固定连接、另一端均与所述弧形条朝向所述中空伸出筒中轴线一面固定连接,所述弧形条上具有多个滚刀;
14、所述第二开挖部与所述边撑机构相邻的所述弧形条上的所述滚刀向外延伸至所述行走机构侧面外。
15、可选地,所述横调机构包括固接于所述行走机构前端的u型架、两个垂直且对称设于所述u型架开口两端的连板、两个l型板,所述连板侧面上具有第一板槽,两个连板上的所述第一板槽分别与两个l型架水平部分滑动配合;
16、布置于底端的所述横调机构底部具有底板和两个第一接板,所述底板两端均具有分别与两个所述第一接板滑动配合的第二板槽,两个所述第一接板分别与两个所述l型板侧面固定连接,布置于顶端的所述横调机构具有顶板和两个第二接板,所述顶板两端均具有分别与两个所述第二接板滑动配合的第三板槽,两个所述第三接板分别与两个所述l型板侧面固定连接。
17、可选地,每组所述边撑机构包括一端铰接于所述横调机构上的支撑臂、将所述支撑臂竖向转动的支撑伸缩动力件、丝杆、与所述丝杆螺纹配合的丝台、驱动所述丝杆转动的角度调节动力件,所述支撑臂沿自身长度方向具有角度调节槽,所述丝杆转动设于所述角度调节槽内,所述第二开挖组件转动连接于所述丝台上;
18、每组所述中撑机构包括一端铰接于所述横调机构上的中撑臂、将所述中撑臂竖向转动的中撑伸缩动力件,所述中撑臂另一端与所述辊轴转动连接。
19、可选地, 所述支护机构包括支护板、支撑尖端、梯形穿接块、竖槽和两个圆槽,所述支撑尖端与所述支护板底部固定连接,所述梯形穿接块的上底与所述支护板朝向管沟长度方向的一侧面固定连接,所述支护板朝向管沟长度方向另一侧面上具有与所述梯形穿接块配合的穿接槽,所述竖槽与所述支护板朝向管沟中心方向的侧面固定连接,两个所述圆槽沿所述竖槽对称设置且与所述竖槽位于所述支护板的同一侧面上,所述支护板顶部具有与所述支撑尖端配合的尖端槽;
20、所述支撑机构包括中空支撑筒、两个支撑杆、两个齿条、撑开齿轮、转轴、撑开动力件、两组支撑组件,所述转轴转动设于所述中空支撑筒内侧中部位置,所述撑开齿轮与所述转轴同轴固定配合,所述撑开齿轮均与两个所述齿条啮合传动,两个所述齿条一端分别与两个所述支撑杆固定连接,两个所述支撑杆均与所述中空支撑筒内壁滑动配合,通过所述撑开动力件驱动所述转轴转动带动两个所述齿条反向运动;两个所述齿条背面分别与所述中空支撑筒内壁滑动配合;
21、每个支撑组件包括第一支杆、和所述第一支杆交叉设置的第二支杆、两个分别垂直固接于所述第一支杆两端的第一撑柱、两个分别垂直固接于所述第二支杆两端的第二撑柱、垂直固接于所述第一支杆和所述第二支杆交叉位置的中心撑柱,所述支撑杆另一端与所述第一支杆和所述第二支杆交叉位置垂直固接。
22、可选地,所述夹持机构包括两个前后相对设置且固接于所述行走机构上方的支座、前后设置且固接于所述行走机构上方的滑轨、转动连接在两个所述支座上的转杆、两个l型座、驱动所述转杆转动的夹持动力件,所述l型座水平部分底部与所述滑轨滑动配合,所述l型座水平部分顶部具有与所述支撑尖端配合的支撑槽,所述l型座竖直部分侧面具有与所述支撑槽连通且与所述支护板配合的护槽,所述转杆沿自身中部对称设有旋向相反的螺纹线,两个所述l型座水平部分分别与所述转杆上的不同旋向螺纹线螺纹配合,通过所述夹持动力件驱动所述转杆转动带动两个所述l型座相向运动或者反向运动。
23、可选地,所述抓取伸缩机构包括两个前后固接在所述行走机构上方的竖直臂、两个竖向运动臂、纵梁、三个旋转台、第一机械臂、第二机械臂、第三机械臂、驱动两个所述竖向运动臂同时转动的运动动力组件;
24、所述竖直臂顶端沿自身轴向具有运动槽,所述运动槽侧壁上具有螺纹,所述运动臂上具有与所述螺纹配合的螺纹线,两个所述竖向运动臂均与所述纵梁两端垂直且转动连接,所述第一机械臂通过所述旋转台连接于所述纵梁中部位置,所述第二机械臂和所述第三机械臂分别通过所述旋转台连接于两个所述竖向运动臂上;
25、所述旋转台包括固接于所述纵梁底部的固定箱、转动设于所述固定箱上的固定轴、与所述固定轴同轴固定配合的涡轮、与所述涡轮啮合传动的蜗杆、驱动所述蜗杆转动的转动驱动件,所述蜗杆与所述固定箱转动连接,所述固定轴一端延伸出所述固定箱外,所述第一机械臂一端与所述固定轴伸出一端固定连接;
26、所述第一机械臂、所述第二机械臂和所述第三机械臂结构相同,所述第一机械臂包括至少三组相连接的转动支臂、与一所述转动支臂一端固定连接的抓取臂;
27、所述转动支臂包括两个u型骨架、两个分别与两个所述u型骨架连接的u型支臂、两个相互垂直固接的转动臂、承载臂、两组分别设于所述u型骨架内的环形传动部件,两个所述转动臂分别转动连接于所述u型支臂内,两组所述环形传动部件分别与两个所述转动臂传动连接,一所述u型骨架与所述固定轴侧壁固定连接,另一所述u型骨架与所述承载臂一端固定连接,一所述转动支臂上的一所述u型骨架与上一所述转臂支臂上的所述承载臂另一端固定连接;
28、所述抓取臂包括与所述承载臂固接的固定架、抓取架、旋转臂、l型臂、两个弧形臂、两个相互啮合传动的弧形齿轮、两个抓爪、设于所述固定架内的旋转驱动件、设于所述抓取架内用于驱动所述旋转臂转动的抓取驱动件,所述固定架与所述抓取架通过所述旋转驱动件连接,所述旋转臂与一所述l型臂一端端部转动连接,所述l型臂另一端与一所述弧形臂固定连接,两个所述抓爪一端分别与两个所述弧形齿轮固定连接,所述抓爪另一端具有锯齿结构和弧形结构。
29、可选地,所述行走机构包括车架、两个设于所述车架左右两端的行走履带、设于所述车架四周的横向伸展组件、驱动左右两端所述行走履带伸展的伸展动力组件,两个所述行走履带分别通过两个所述横向伸展组件与所述车架连接,所述伸展动力组件和所述横向伸展组件配合驱动两个所述行走履带分别向左和向右运动;
30、所述车架中间位置沿左右横向开设有驱动腔,所述伸展动力组件包括沿所述车架前后纵向设置的第一锥齿轮、两个分别与所述第一锥齿轮啮合传动的第二锥齿轮、两个同轴转动设于所述驱动腔内的驱动轴、两个一端分别与两个所述行走履带固接的传动轴、多个位于所述传动轴另一端且沿所述传动轴周向布置的滑台、与所述第一锥齿轮同轴固定配合的转动轴、驱动所述转动轴转动的转动动力件,两个所述驱动轴一端分别与两个所述第二锥齿轮同轴固定配合,另一端具有与所述传动轴滑动配合的滑动腔,所述滑动腔侧壁上具有多个与所述滑台滑动配合的滑槽,所述车架中间位置左右两端分别具有与所述驱动腔连通且不同旋向的螺纹孔,两个所述传动轴上分别具有与两个不同旋向的所述螺纹孔螺纹配合的螺纹;
31、每个所述横向伸展组件包括一端固接于所述车架上的固定臂、伸展臂、驱动所述伸展臂伸缩的伸展动力件,所述固定臂另一端具有与所述伸展臂滑动配合的伸展槽,所述伸展动力件两端分别与所述车架和所述伸展臂侧面固定连接。
32、一种城市管道工程智能化开挖的施工方法,其特征在于:使用前文所述的城市管道工程智能化开挖施工设备,包括如下步骤:
33、修建工作井:在预设管沟起始位置和终止位置修建工作井,通过吊装设备将开挖施工设备吊入工作井中;
34、行走机构调整:根据管沟预设尺寸调整所述行走机构左右宽度;
35、开挖装置调整:根据管沟预设尺寸调整所述开挖装置左右宽度和上下高度,通过两个横向伸缩动力件推动所述中空伸出筒伸出所述盲孔,此时所述横调机构和所述边撑机构同时向宽度方向动作以达到预设宽度;
36、通过所述调节动力件驱动多个所述第一开挖组件上的多个所述第二齿轮同时转动,所述第一齿轮转动使得所述滑动杆伸出,所述弧形块转动半径增大,所述第一开挖部和所述第二开挖部上的第一伸缩臂均伸长,使得所述弧形条转动半径增大,同时与所述边撑机构配合控制所述开挖装置运动以达到预设高度;
37、挖掘支护:通过所述开挖动力组件和所述行走机构配合,所述行走机构行进过程中所述辊轴转动以实现管沟的挖掘,所述螺旋输送机构将挖掘土体输送出管沟,通过抓取伸缩机构将所述支护装置对管沟宽度方向两侧进行支护以完成管沟的边开挖边支护;
38、吊出开挖施工设备:边开挖边支护至终止位置工作井后,吊出开挖施工设备,完成管沟挖掘支护施工。
39、如上所述,本发明的一种城市管道工程智能化开挖施工设备及施工方法,至少具有以下有益效果:
40、通过多个第一开挖组件、对称设于辊筒两端的第二开挖组件、中撑机构和边撑机构配合,使得能够在行走机构左右两侧方向调整开挖装置的宽度,从而适应不同宽度和高度管沟,提高了适用性。通过开挖动力组件驱动辊轴转动同时带动多个第一开挖组件、两个第二开挖组件转动对土体进行切削,管沟挖掘成型后,行走机构行进过程中将开挖装置向管沟长度方向推进,同时通过抓取伸缩机构将支护机构插入管沟宽度方向两侧,之后利用支撑机构将管沟宽度方向两侧的支护机构支撑连接,使得对管沟宽度方向两侧侧壁起到支撑和防护作用,减低工人劳动强度且能够有效避免进入沟槽内作业发生沟槽坍塌风险,工人施工安全系数高。通过行走装置、支护装置、开挖装置和螺旋输送机构的集成设计使得整个开挖施工设备能够实现一体化作业,从开挖、土体输送到再到支护,形成一个完整的作业流程,大大提高了工作效率和作业质量、降低作业成本、提高作业安全性。
41、通过直线动力件的伸缩推动转臂带动多个第二齿轮转动,多个第一齿轮旋转分别带动推动杆在弧形槽内滑动,多个滑动杆在固定盘上的滑动槽内滑动,与中撑机构配合使得能够根据管沟高度调整滚刀在辊轴圆周方向的位置调整,从而有效挖掘不同高度的管沟,提高了适用性和实用性。通过横向伸缩动力件固定在盲孔底部,伸缩端与中空伸出筒连接,使得中空伸出筒可以灵活地伸缩,从而调整第一开挖部和第二开挖部的位置,以适应不同的开挖宽度需求,通过伸出盲孔的第一开挖部和第二开挖部上的开挖模块的每个第一伸缩臂的伸缩和中撑机构、边撑机构的配合,使得能够适应不同开挖深度需求。当需要适应不同管沟开挖宽度时,通过两个横向伸缩动力件的伸缩将两个中空伸出筒向左右两侧伸出,从而以达到管沟开挖宽度,当需要适应不同管沟开挖深度时,通过第一伸缩臂的伸缩、中撑机构、转动连接部和边撑机构的配合,使得能够达到管沟开挖深度,与边撑机构相邻的弧形条上的滚刀向外延伸至行走机构侧面外,使得第二开挖组件在挖掘管沟边缘时,能够更好地清理管沟边缘的土体,确保管沟边缘的挖掘效果。通过连接套筒、连接杆、连接伸缩件和两个万向节的组合设计,连接套筒与连接杆滑动配合,且内壁凹槽与外壁凸块滑动配合,既保证了连接的灵活性,又能在一定程度上承受不同方向的力,万向节可使转筒在不同角度下随中空伸出筒灵活转动,适应管沟挖掘过程中复杂的地形和角度变化,满足不同管沟宽度和深度调节。
- 还没有人留言评论。精彩留言会获得点赞!