测量装置,可移动装置,以及车辆的制作方法
1.本公开涉及一种测量装置,可移动装置,以及车辆。
背景技术:
2.诸如照相机之类的成像设备附接到可移动装置(例如,车辆,无人机),以设计可移动测量装置,该可移动测量装置可以测量可移动装置的外部环境的状态或状况,诸如附近的车辆、路面状况、隧道表面状况。用于测量外部环境的状态或条件的成像装置可以使用已知的摄像机,例如具有广角透镜的摄像机,以及配备有多个摄像机的立体摄像机。
3.日本专利申请特开no.2007-49276-a公开了一种车载全景摄像机系统。
4.引文列表
5.专利文献
6.【专利文献1】日本专利申请公开第2007-49276-a号
技术实现要素:
7.技术问题
8.然而,在日本特开2007-49276-a号公报中公开的构造中,当捕获可移动装置附近的物体(例如,路面)的图像时,因摄像机的成像范围和可移动装置发生干扰,成像范围变小。
9.本发明鉴于上述问题而设计,本发明旨在提供一种新型且有用的测量装置,可移动装置,以及车辆,其能够以更高的精度和更大的范围执行对象的测量。
10.解决问题的方案
11.本发明的示例实施例包括可安装在可移动装置上的测量装置。所述测量装置包括:第一成像装置,配置为在第一图像捕获方向捕获图像,所述第一图像捕获方向相对于所述可移动装置的行进方向具有第一角度;以及第二成像装置,与所述第一成像装置相邻,配置为在第二图像捕获方向捕获图像,所述第二图像捕获方向相对于所述可移动装置的行进方向具有第二角度。所述第一成像装置和所述第二成像装置配置为使得所述第一成像装置的第一成像范围和所述第二成像装置的第二成像范围至少部分地重叠。所述第一成像装置的所述第一图像捕获方向和所述第二成像装置的所述第二图像捕获方向中的至少一个相对于所述可移动装置的宽度尺寸设为给定角度。
12.本发明的示例实施例包括可安装在可移动装置上的测量装置。所述测量装置包括:多个成像装置,其包括至少三个成像装置,每个成像装置配置为在图像捕获方向捕获图像,所述图像捕获方向相对于可移动装置的行进方向具有给定角度。所述多个成像装置中的至少两个相邻成像装置配置为使得相邻成像装置的成像范围至少部分地重叠,并且,至少一个所述成像装置的图像捕获方向相对于可移动装置的宽度尺寸设为给定角度,而除了具有以给定角度设置的图像捕获方向的所述至少一个成像装置之外,另一个或多个所述成像装置的图像捕获方向相对于可移动装置的宽度尺寸没有设为给定角度。
13.本发明的示例实施例包括可安装在可移动装置上的测量装置。所述测量装置包括:多个成像装置,其至少包括第一成像装置和第二成像装置。所述第一成像装置与所述第二成像装置相比,配置为更靠近成像目标。所述第一成像装置的第一图像捕获范围和所述第二成像装置的第二图像捕获范围在成像目标处至少部分重叠。当所述第一成像装置相对于可移动装置的宽度尺寸的第一倾斜角“θ2a”由所述第一成像装置的第一图像捕获方向和从所述成像目标垂直延伸的垂直线定义,而所述第二成像装置相对于可移动装置的宽度尺寸的第二倾斜角度“θb”由所述第二成像装置的第二图像捕获方向和从所述成像目标垂直延伸的垂直线定义时,所述第一倾斜角“θ2a”和所述第二倾斜角“θb”满足“θ2a>θb”的条件。
14.本发明的效果
15.根据本发明的优选实施例,可以提供一种新型且有用的测量装置,可移动装置,以及车辆,其可以以更高的精度和更大的范围执行对象的测量。
附图说明
16.附图旨在描绘本发明的示例实施例,并且不应被解释为限制其范围。除非明确指出,否则附图不应视为按比例绘制。同样,在几个视图中,相同或相似的附图标记表示相同或相似的组件。
17.图1a和图1b是根据第一实施例的可移动测量装置的示例图。图1a是可移动测量装置的侧视图。图1b是从后侧观察的可移动测量装置的立体图。
18.图2是根据第一实施例的可移动测量装置的测量处理的方案。
19.图3是从第一实施例的测量装置的下方侧观察的测量装置的立体图。
20.图4是从第一实施例的测量装置的侧面观察的测量装置的截面图。
21.图5是从第一实施例的测量装置的后方侧观察的测量装置的截面图。
22.图6是比较例的测量装置的背面的示意图。
23.图7a和图7b是比较例的测量装置的上侧的示意图。
24.图8a和图8b是比较例的测量装置的后侧的示意图。
25.图9是根据第一实施例的测量装置的成像范围的示意图。
26.图10a和图10b是测量装置中的摄像机的布局的示意图,其中,图10a是根据第一实施例的立体摄像机的布局的示意图,图10b是比较例的摄像机的布局的示意图。
27.图11是根据第一实施例的测量装置的图像捕获范围的立体图。
28.图12a和图12b是测量装置中的摄像机的布局的示意性侧视图,其中,图12a表示根据第一实施例的立体摄像机的布局,图12b表示根据第一实施例的立体摄像机的布局,图12b表示比较例的摄像机的布局。
29.图13a和图13b是根据第一实施例的测量装置的有效工作距离的示意图,图13a是从后侧观察的测量装置的后视图,图13b是从后侧观察的测量装置的立体图。
30.图14是从测量装置的后侧观察的根据第二实施例的测量装置的截面图。
31.图15是从测量装置的后侧观察的第三实施例的测量装置的截面图。
32.图16是从测量装置的后侧观察的第四实施例的测量装置的截面图。
33.图17是从测量装置的后侧观察的第五实施例的测量装置的截面图。
34.图18是从测量装置的后侧观察的第六实施例的测量装置的截面图。
具体实施方式
35.在下文中,给出了对本发明的一个或多个实施例的描述。在本说明书中,相同的附图标记赋予相同的部件,并且将省略其描述。
36.在下文中,参照图1和图2描述根据第一实施例的包括测量装置100的可移动测量装置800。可移动测量装置800也可以称为测量装置或测量系统。图1a和图1b(图1)是根据第一实施例的包括测量装置100的可移动测量装置800的示例图。图1a是可移动测量装置800的侧视图。图1b是从可移动测量装置800的后侧观察的可移动测量装置800的立体图。图2是可移动测量装置800的测量处理的方案。
37.在参照图1和图2的描述以及本公开中的其他描述中,将车辆700的行进的方向称为车辆700的行进方向,将车辆700的行进方向称为前方向或前进方向,与前方向相反的方向称为后方向或倒退方向,重力方向称为向下方向,与重力方向相反的方向称为向上方向,相对于行进方向的水平右方向称为右方向,相对于行进方向的水平左方向称为左方向。
38.如图1和图2所示,可移动测量装置800包括例如车辆700(可移动装置的示例),附接到车辆700的安装架750,以及通过安装架750安装在车辆700上的测量装置100。
39.关于图1和图2所示的可移动测量装置800,安装架750安装在车辆700的后端,如图2所示,安装为测量装置100设有的立体摄像机130(成像装置的示例)的光路的轨迹s基本指向下方。利用该配置,当车辆700沿向前方向f(见图2)移动以进行测量时,可移动测量装置800可以使用配置在测量装置100中的立体摄像130捕获路面900的图像,在本说明书中,作为测量对象或摄像对象的路面900的凹凸(不规则)和状态(例如,车道线是否消失)为对象。
40.更具体地说,可移动测量装置800可以测量“裂缝比率、车辙、以及平坦度(沿着行驶方向的不规则性)”的路面特性。根据测得的路面特性,可以计算维护控制指数(mci)。通常,mci用于基于路面特性(例如“裂缝比率、车辙、以及平坦度”)定量评估铺装性。mci可以由个人计算机(pc)或平板设备(其是配置在车辆700外部的外部设备)计算,其从车辆700接收测量处理之后的测量数据,或者可以通过设置在车辆700内部的pc,车辆700一边在路面900上行驶,一边进行计算。
41.此外,并不局限于车辆700的后端,也可以将安装架750附接到车辆700的任何侧面,例如车辆700的前端或车辆700的设有门的侧面。
42.以下,参照图3至图5对第一实施例的测量装置100进行说明。图3是从测量装置的下方侧观察的测量装置100的立体图。图4是从测量装置100的侧面观察的测量装置100的截面图。图5是从测量装置100的后方侧观察的测量装置100的截面图。
43.参照图3,测量装置100包括例如基架110,摄像机安装架120,立体摄像机130,以及保护盖单元200。测量装置100例如包括多个立体摄像机130以获取宽广范围的测量数据。如图3所示,测量装置100可以包括例如三个立体摄像机130(130-1、130-2、130-3),三个立体摄像机130附接到三个摄像机安装架120(120-1、120-2、120-3)。此外,基架110的一端固定到安装架750(参照图1),而摄像机安装架120安装到基架110的另一端。摄像机安装架120固定用作成像设备的立体摄像机130。此外,摄像机安装架120可以设置有用于调整立体摄像机130的摄像角度的角度调整机构。
44.立体摄像机130是具有两个透镜131的摄像机,可以通过处理获取的图像数据测量直到测量目标的范围或距离。在本说明书中,测量装置100设有的成像装置采用立体摄像机130,但不限于此。例如,在确认物体的状态或状况的情况下,具有单眼透镜的摄像机也可以用作成像装置。此外,测量装置100设有的成像装置的数量不限于三个,可以是两个,或者四个或更多。通过在测量装置100中包括多个成像装置,可以从更大的范围获取测量数据。此外,通过将立体摄像机130的透镜131设为焦距35mm以下的广角透镜,可以从更大的范围获取测量数据。在下文中,在本说明书中,立体摄像130的术语可以表示一个或多个立体摄像机130。
45.保护盖单元200由例如树脂板和支撑树脂板的铝框架构成,形成在下面侧(即,成像装置的图像拍摄方向侧)具有开口部211(包括开口部211a,211b,211c)的盒体。立体摄像机130设置在保护盖单元200的内部空间中。
46.此外,保护罩单元200具有侧开口部212a和侧开口部212b(参照图3),其中,侧开口部212a从右侧的下端侧形成,而侧开口部212b从左侧的下端侧形成。此外,形成为开口部211与侧开口部212a连通,开口部211与侧开口部212b连通。这样,形成在保护罩单元200的开口部形成作为开口部211和子开口部212a及212b的整体,从右侧面通过下面直到左侧面,形成一个开口空间。
47.此外,框架216a和216b设置在与立体摄像机130的光路的轨迹(参照图9中的s-1至s-3)不干扰的位置,这将在后文描述。在图3的示例情况下,下面侧的开口部211由框架216a和216b分隔,以形成三个子开口部211a,211b和211c,但是在某些情况下可以省略框架216a和216b。
48.此外,保护罩单元200可以设置有可以覆盖子开口部211a、211b、和211c的保护构件。通过使用保护构件覆盖子开口部211a、211b、和211c,当不执行测量时,可以保护设置在保护盖单元200内部的立体摄像机130免受外部干扰。
49.如图4所示,立体摄像机130(130-1、130-2、130-3)的图像拍摄方向相对于车辆700(参照图1)的行进方向(前后方向)具有所设定的角度,设为“θ1”。换句话说,当如图4所示,从车辆700的宽度尺寸(宽度方向)观察测量装置100时,立体摄像机130的图像拍摄方向(图4中用点划线表示)相对于竖直方向或向下方向(图4中用双点划线表示),向车辆700的行进方向的后方以所设定角度“θ1”倾斜。此外,如果将测量装置100安装在车辆700的前端,立体摄像机130的图像拍摄方向可以相对于竖直方向或向下方向,向车辆700的行进方向的前方以所设定角度倾斜。
50.此外,如图5所示,在多个立体摄像机130中,立体摄像机130-1和130-3的图像拍摄方向相对于车辆700的宽度方向(左右方向的宽度尺寸)分别以所给定角度倾斜,立体摄像机130-1的给定角度为“θ2”,立体摄像机130-3的给定角度为“θ3”。换句话说,当从前后方向观看测量装置100时,立体摄像机130-1和130-3的图像拍摄方向(图5中用点划线表示)相对于竖直方向或向下方向(图5中用双点划线表示),向车辆700的宽度方向(左右方向上的宽度尺寸)外侧,分别以所设定的角度“θ2”和“θ3”倾斜。立体摄像机130-1和130-3设置的给定角度“θ2”和“θ3”可以是相同角度或不同角度。
51.另一方面,如图5所示,立体摄像机130-2的图像拍摄方向相对于车辆700的宽度方向(左右方向的宽度尺寸),不具有所给定的角度。换句话说,当从前后方向观看测量装置
100时,立体相机130-2的图像拍摄方向与垂直方向(上下方向)一致,该垂直方向(上下方向)对应于从测量目标(例如路面900)延伸的垂直线。
52.以下,参照图6至图8,通过与比较例的测量装置100x进行比较,对第一实施例的测量装置100进行说明。图6是比较例的测量装置100x的后方的示意图。图7a和7b(图7)是比较例的测量装置100x的上侧的示意图。图8a和图8b(图8)是比较例的测量装置100x的后方的示意图。参照图6、图7、和图8,通过仅指示用作成像装置的摄像机130x的位置,简化了测量装置100x的配置。
53.如图6所示,当多个摄像机130x用于捕获具有较宽范围的物体(例如,路面900)的图像时,一个摄像机130x的图像捕获范围和另一摄像机130x的另一图像捕获范围重叠,形成重叠区域d。在该配置中,如果通过在宽度方向上设置摄像机130x之间的较大间隔来将测量装置100x的宽度方向上的摄像范围a设置得较宽,则测量装置100x的尺寸在宽度方向变大,这不合适。
54.如图7a所示,当使用多个摄像机130x在较宽范围内捕获对象(例如,路面900)的图像时,车辆700的一部分可能会与摄像范围a的一部分发生干涉而成为干涉区域n。在这种情况下,测量装置100x无法捕获与干涉区域n相对应的路面900的图像,由于干涉区域n,物体(例如,路面900)的摄像范围a变小。另一方面,如图7b所示,如果多个照相机130x配置在离开车辆700的后端的位置处以避免摄像范围a和车辆700之间的干扰,则测量装置100x在前后方向上变大,这不可取。
55.在下文中,描述摄像机130或130x的透镜的外表面与被测量物体(测量目标)之间的工作距离。具体地说,在本说明书中,将能够实现给定的测量精度的、从最短的工作距离到最长的工作距离的距离范围称为有效工作距离wd。有效工作距离wd例如对应于在摄像机目录中指定的推荐拍摄距离和推荐操作距离的范围。如果摄像机130(或130x)与测量目标(例如路面900)之间的距离在有效工作距离wd的范围内,则可以在摄像范围内获得具有更高图像质量的图像。相反,如果摄像机130(或130x)与测量目标(例如,路面900)之间的距离偏离有效工作距离wd(如果摄像机130(或130x)与测量目标之间的距离变为大于或小于有效工作距离wd),则测量精度会因缺陷图像(例如图像模糊)而降低。
56.例如,如果通过在摄像机130x和物体(例如,路面900)之间设置更大的距离,以扩大摄像范围a的尺寸,将图8a中所示的测量装置100x的结构改变为图8b所示的测量装置100x的结构,则路面900上的摄像范围a偏离摄像机130x的有效工作距离wd,如图8b所示,由此产生缺陷图像(例如,图像模糊)。
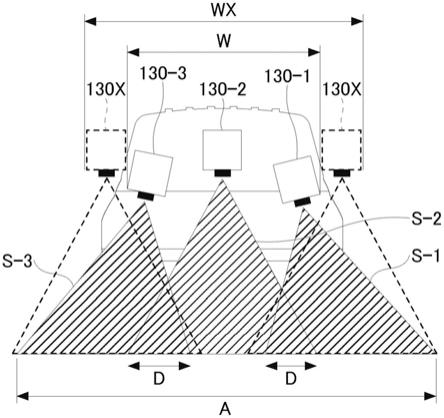
57.图9是根据第一实施例的测量装置100的摄像范围的示意图。在图9中,仅指示用作成像装置的立体摄像机130的位置,将测量装置100的构成简略化。此外,立体摄像机130-1的光路s-1的轨迹、立体摄像机130-2的光路s-2的轨迹、以及立体摄像机130-3的光路s-3的轨迹在图9中用阴影线表示。此外,在图9中还使用虚线表示配置在比较例的测量装置100x(参照图6)的两外侧的摄像机130x的位置。
58.如图5所示,根据第一实施例的测量装置100的立体摄像机130-1和130-3的图像拍摄方向向着车辆700的宽度方向外侧,分别设置给定角度“θ2”和“θ3”倾斜。利用这种配置,如图9所示,位于外侧的立体摄像机130-1和130-3与希望图像重叠的立体摄像机130-2具有重叠区域d,在具有重叠区域d的状态下,能确保摄像范围a,与立体摄像机130x(参照图9中
的虚线)的位置相比,能将位于外侧的立体摄像机130-1和130-3朝车辆700的宽度方向内侧设置。通过该配置,与测量装置100x的尺寸相比,可以将测量装置100的尺寸设置为较小,特别是,与测量装置100x的宽度wx相比,可以将测量装置100的宽度w设置为较小,从而可以减小测量装置100的尺寸。
59.在下文中,参照图10a和图10b(图10)描述在测量装置100中的立体摄像机130的布局或布置。图10a和图10b(图10)是测量装置100中的立体摄像机130的布局的示意图。图10a是根据第一实施例的立体摄像机130的布局的示意图。图10b是比较例的立体摄像机130的布局的示意图。在图10a和图10b中,未表示车辆700、安装架750、以及测量装置100的外部部件,而仅表示立体摄像机130-1和130-2。
60.如图10a和图10b所示,每个立体摄像机130-1和130-2可以相对于路面900以给定的倾斜角度倾斜。所述给定的倾斜角度可以由立体摄像机130的图像捕获方向(图10中的点划线)和垂直于测量目标例如路面900的线定义。在本说明书中,将垂直于测量目标表面的线称为垂直线。
61.如图10a和图10b所示,一个摄像机(例如,立体摄像机130-1)相对于从路面900延伸的垂直线以第一倾斜角“θ2a”倾斜,而另一个摄像机(例如,立体摄像机130-2)与所述一个摄像机相邻,相对于从路面900延伸的垂直线以第二倾斜角“θb”倾斜。
62.在图10a的示例情况下,立体摄像机130-1相对于垂直线以第一倾斜角“θ2a”、例如30度(30
°
),在车辆700的宽度方向向外倾斜,这意味着立体摄像机130-1的图像捕获方向在车辆700的宽度方向向外倾斜第一倾斜角“θ2a”。
63.此外,在图10a的示例情况下,与立体摄像机130-1相邻的立体摄像机130-2相对于垂直线不倾斜,而是与垂直线一致,这意味着通过将第二倾斜角“θb”设为零度(0
°
)(θb=0
°
),立体摄像机130-2相对于垂直线倾斜。从而立体摄像机130-2相对于垂直线不倾斜,立体摄像机130-2的图像拍摄方向相对于车辆700的宽度方向不倾斜。
64.如上所述,由于立体摄像机130-1(或130-3)的图像拍摄方向在车辆700的宽度方向上向外倾斜,因此,第一倾斜角“θ2a”和第二倾斜角“θb”可以在实施例中满足以下条件(1):
65.θ2a>θb
ꢀꢀꢀ
(1)
66.优选地,一个摄像机(例如,立体摄像机130-1)的第一倾斜角“θ2a”和相邻的另一个摄像机(例如,立体摄像机130-2)的第二倾斜角“θb”在实施例中满足以下条件(2):
67.|θ2a-θb|≤30
°ꢀꢀꢀ
(2)
68.在本实施例的配置中,立体摄像机130-1可绕设置在给定位置的旋转中心旋转,利用该旋转中心,可以将成像范围a设定在有效工作距离wd内,同时减小测量装置100的尺寸。然而,如图10b所示,如果立体摄像机130-1的第一倾斜角“θ2a”增加太大,则立体摄像机130-1和相邻的立体摄像机130-2的位置变得彼此太靠近,由此,立体照摄像机130-1进入相邻的立体摄像机130-2的图像捕获范围(即,视野),从而,立体照摄像机130-2捕获立体摄像机130-1的图像,这引起了问题。
69.通过设定“|θ2a-θb|≤30
°”
的条件(2),如上所述,立体摄像机130-2不捕获与立体摄像机130-2相邻的立体摄像机130-1的图像,同时,成像范围a设定在有效工作距离wd内,减小测量装置100的尺寸。
70.在本说明书中,立体摄像机130的第一倾斜角“θ2a”对应于在图5以及本说明书后文描述的图14至图18中所示的立体摄像机130的给定角度“θ2”或“θ3”,立体摄像机130的第二倾斜角“θb”在图5以及本说明书后文描述的图14至图18中设定为零度(0
°
)。
71.此外,如图10a(和图5)所示,与配置在车辆700的宽度方向中央的立体摄像机130-2相比,配置在车辆700的宽度方向上的外侧的立体摄像机130-1和130-3安装在较低的位置。利用这种配置,在测量装置100中使用的立体摄像机130-1、130-2和130-3中的每一个都可以采用具有相同有效工作距离wd的相同摄像机。换句话说,没有为测量装置100设置不同类型的摄像机,由此,可以降低测量装置100的成本。对于第一实施例的测量装置100,两个外侧的立体摄像机130-1和130-3与中央的立体摄像机130-2之间的高度差设置为例如200mm。
72.图11是根据第一实施例的测量装置100的图像捕获范围的立体图。如图4所示,关于根据第一实施例的测量装置100,立体摄像机130(130-1、130-2、130-3)的图像拍摄方向设置为向着车辆700的行进方向后方,具有给定角度。通过这种配置,如图11所示,能使得立体摄像机130-1的光路轨迹s-1、立体摄像机130-2的光路轨迹s-2、以及立体摄像机130的光路轨迹s-3在车辆700的行进方向上向后移动,由此,可以避免成像范围a和车辆700之间的干扰,可以防止路面900上的成像范围a的尺寸减小。
73.图12a和图12b(图12)是测量装置100中的立体摄像机130的布局的示意性侧视图。图12a表示第一实施例的立体摄像机130的布局。图12b表示比较例的立体摄像机130的布局。在图12中,未表示测量装置100的安装架750以及测量装置100的外部部件。
74.如图12a所示,设定立体摄像机130相对于车辆700的向后行驶方向的给定角度“θ1”(参照图4),优选地,设置以下条件(3),诸如“θ1”小于或等于25度(25
°
)。
75.θ1≤25
°ꢀꢀꢀꢀ
(3)
76.如果在车辆700行驶或车辆700在交通信号灯停车期间,车辆700(即,可移动测量装置800)与在车辆700后方的跟随车辆701(称为“后方车辆”)之间的车辆间距离变得更近,如图12b所示,后方车辆701可能进入立体摄像机130的视场,由此,不能正确地执行路面900的测量。
77.通过如上所述将条件(3)设定为“θ1≤25
°”
,可以减少,特别是防止与后方车辆701的干扰。在该实施例中,即使一车辆与另一后面车辆之间的车辆到车辆的距离变为大约2m,通过设置条件(3),也可以有效地确保立体摄像机130的视场。
78.图13a和图13b(图13)是根据第一实施例的测量装置100的有效工作距离wd的示意图。图13a是从后侧观察的测量装置100的后视图。图13b是从后侧观察的测量装置100的立体图。在图13中,省略立体摄像机130-1的光路s-1的轨迹,仅表示立体摄像机130-2的光路s-2的轨迹和立体摄像机130-3的光路s-3的轨迹。对于根据第一实施例的测量装置100,例如,具有1000mm至2500mm的有效工作距离wd的立体摄像机用作立体摄像机130。
79.图13a表示在立体摄像机130-2的光路s-2的轨迹中不太可能出现缺陷图像(例如图像模糊)的一个区域(例如有效工作距离wd-2)。同样,图13a表示在立体摄像机130-3的光路s-3的轨迹中不太可能出现缺陷图像(例如,图像模糊)的另一区域(例如,有效工作距离wd-3)。如图13a所示,有效工作距离wd-2和wd-3中的每一个都包括截棱锥的区域,该区域是虚拟区域。可以将作为测量目标的路面900设置在形成一个截棱锥的有效工作距离wd-2和
形成另一截棱锥的有效工作距离wd-3内。可以将路面900类似地设置在形成立体摄像机130-1的另一个截棱锥wd-1内(参照图11)。
80.此外,如图13a和图13b所示,关于立体摄像机130-3的有效工作距离wd-3,截棱锥之中,将最接近立体摄像机130-3的工作距离形成的四边形设为上面u,将离立体摄像机130-3最远的工作距离形成的四边形设为下面l。由于立体摄像机130-3向左后侧倾斜,因此,构成上面u的四边形的四个顶点之中,位于右前方的顶点p1(第一顶点p1)配置在最低点。此外,构成下面l的四边形的四个顶点之中,位于顶点p1对角方向的左后方的顶点p2(第二顶点p2)配置在最高点。
81.此外,如图13b所示,可以使用区域a-3捕获图像,该区域包括设置在截棱锥的上面前方侧的顶点p1的邻近点p3和设置在位于对角方向的截棱锥的底面后方侧的顶点p2的邻近点p4。利用该配置,可以增加设置在外侧的立体摄像机130-3的成像范围,由此,可以增加测量装置100的成像范围a的尺寸。此外,由于可以在有效工作距离wd内捕获图像,因此,在所获取的图像中不太可能出现缺陷图像(例如,图像模糊)。
82.已经使用立体摄像机130作为成像装置描述了根据第一实施例的测量装置100,但是不限于此。在下文中,描述根据其他实施例的测量装置,其中可以类似地应用在第一实施例中描述的配置和功能。
83.图14是从后侧观察第二实施例的测量装置100a的截面图。测量装置100a包括例如具有单眼透镜131作为成像装置的摄像机130a。
84.已经描述了根据第一实施例的测量装置100具有三个立体摄像机130作为成像设备,但是不限于此。例如,如在本说明书中描述的其他实施例中所表示,成像装置的数量可以是两个,或者四个或更多。
85.图15是从后侧观察第三实施例的测量装置100b的截面图。测量装置100b包括例如两个立体摄像机130(130-1、130-2)。设置在车辆700的宽度方向上的外侧的立体摄像机130-1和130-2的图像拍摄方向相对于车辆700的宽度方向,分别具有给定的角度“θ2”和“θ3”。测量装置100b的其他配置与根据第一实施例的测量装置100的配置相同。
86.图16是从后方侧观察第四实施例的测量装置100c的截面图。测量装置100c包括例如两个立体摄像机130(130-1、130-2)。相对于车辆700的宽度方向,将设置在车辆700的宽度方向上的外侧的立体摄像机130-1的图像拍摄方向设置为给定角度“θ2”。立体摄像机130-2的图像拍摄方向相对于车辆700的宽度方向,不具有给定角度。测量装置100c的其他配置与根据本发明第一实施例的测量装置100的配置相同。尽管右侧的立体摄像机130-1相对于车辆700的宽度方向设置为给定角度“θ2”,而左侧的立体摄像机130-2相对于车辆700的宽度方向设置为不具有给定角度,但并不限于此。例如,可以将左侧的立体摄像机130-2相对于车辆700的宽度方向设置为给定角度,而将右侧的立体摄像机130-1相对于车辆700的宽度方向设置为不具有给定角度。
87.图17是从后方侧观察第五实施例的测量装置100d的截面图。测量装置100d包括例如四个立体摄像机130(130-1、130-2、130-3、130-4)。设置在车辆700的宽度方向上的外侧的立体摄像机130-1和130-4的图像拍摄方向相对于车辆700的宽度方向分别设置有给定角度“θ2”和“θ3”,另一方面,立体摄像机130-2和130-3的图像拍摄方向设定为相对于车辆700的宽度方向不具有给定角度。测量装置100d的其他构成与根据第一实施例的测量装置100
的配置相同。
88.图18是从后方侧观察第六实施例的测量装置100e的截面图。测量装置100e包括例如五个立体摄像机130(130-1、130-2、130-3、130-4、130-5)。设置在车辆700的宽度方向上的外侧的立体摄像机130-1和130-5的图像拍摄方向相对于车辆700的宽度方向分别设置有给定角度“θ2”和“θ3”,另一方面,立体摄像机130-2、130-3和130-4的图像拍摄方向设定为相对于车辆700的宽度方向不具有给定角度。测量装置100e的其他配置与根据第一实施例的测量装置100的配置相同。
89.在上述任一实施例中,在将测量装置安装在诸如汽车、卡车等车辆上的同时使用该测量装置。该测量装置可以安装在任何能够移动的可移动装置上。
90.附图标记列表
91.100、100a-100e 测量装置
92.110 基架
93.120 摄像机安装架
94.130 立体摄像机(成像装置)
95.130a 单眼摄像机(成像装置)
96.131 透镜
97.200 保护罩单元
98.211、211a、211b、211c、212a、212b 开口部
99.216a、216b 框架
100.700 车辆(可移动装置)
101.750 安装架
102.800 可移动测量装置
103.900 路面(成像目标)
104.s 光路轨迹
105.a 成像范围
106.d 重叠区域
107.wd 有效工作距离
108.n 干扰区
109.f 前进方向
110.p1 顶点(第一顶点)
111.p2 顶点(第二顶点)
112.p3、p4 邻近点
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1