一种高架桥预制立柱安装自动调整方法及系统与流程
[0001]
本发明涉及工程建筑技术领域,尤指一种高架桥预制立柱安装自动调整方法及系统。
背景技术:
[0002]
预制装配式建筑技术是一种以预制装配式混凝土结构为主要构件,经装配、连接而成的新兴绿色环保节能型建筑技术。随着我国对建筑产业化政策的调整,建筑工业化的热潮不断升温,预制装配施工的应用范围越来越广。
[0003]
高架桥是指跨越深沟峡谷以代替高路堤的桥梁,以及在城市桥梁中跨越道路的桥梁,高架桥一般由高支撑的塔或支柱支撑。城市发展时,往往伴随着交通拥挤、建筑物密集等问题,而街道又难以较大范围的拓宽,采用高架桥可以疏散交通密度,提高运输效率。此外,在城市间的高速公路或铁路,为避免和其他线路平面交叉、节省用地、减少路基沉陷等,也常采用高架桥。
[0004]
在高架桥的预制立柱安装过程中,由于预制立柱的体积较大、高度较高,往往很难对其垂直度、坐标等进行精准调整,而高架桥的建设又关于民生大计,对预制立柱的安装精度要求极高,因此,需要一种施工效率更高,对预制立柱的调整精度更高的预制立柱安装方法。
技术实现要素:
[0005]
本发明的目的是提供一种高架桥预制立柱安装自动调整方法及系统,能够使预制立柱的安装效率更高,且对预制立柱的调整精度更高,有利于保证高架桥的质量。
[0006]
本发明提供的技术方案如下:
[0007]
本发明提供一种高架桥预制立柱安装自动调整方法,包括步骤:
[0008]
根据预制立柱的施工图建立三维模型,并提取所述三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据;
[0009]
通过自动测量机器人实时采集预制立柱的第一当前数据;
[0010]
将所述第一当前数据与所述参考数据进行比对,获得第一偏差,并根据所述第一偏差对预制立柱进行粗调;
[0011]
通过三维激光扫描仪对预制立柱进行扫描,获得预制立柱的第二当前数据;
[0012]
将所述第二当前数据与所述参考数据进行比对,获得第二偏差,并根据所述第二偏差对预制立柱进行精调。
[0013]
具体的,在本方案中,自动测量机器人布置在吊装立柱旁5-10米处,三维激光扫描仪的扫描仪精度为0.1mm。
[0014]
通过预制立柱的施工图能够建立对应的三维模型,具体可以为bim(建筑信息模型),提取三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据;在预制立柱下吊过程中,可以通过自动测量机器人实时采集预制立柱的第一当前数据,包括坐标、垂
直度等数据,将第一当前数据与参考数据进行比对,能够获得预制立柱的第一偏差,之后便能够根据第一偏差对预制立柱进行粗调;粗调之后,再通过三维激光扫描仪对预制立柱进行扫描,能够获得更精准的预制立柱的第二当前数据,将第二当前数据与参考数据进行比对,能够获得更精准的第二偏差,之后便可以根据第二偏差对预制立柱进行精调。由于本方案是在立柱吊装的过程中,实现预制立柱偏差的自动测量以及对应的粗调和精调,能够减少安装过程中的人为干预,有利于提高预制立柱的安装效率,且通过先粗调后精调的方式,能够使预制立柱的调整精度更高,有利于保证高架桥的质量。
[0015]
进一步地,所述的提取所述三维模型内预制立柱的施工信息之后,通过自动测量机器人实时采集预制立柱的第一当前数据之前,还包括步骤:
[0016]
根据预制立柱的施工信息确定立柱调整支架的位置,所述立柱调整支架通过电动液压千斤顶驱动;
[0017]
在预制立柱运抵施工现场后,通过吊车下吊预制立柱,在预制立柱接近地面时,暂停预制立柱的下吊,并在预制立柱的下方安装所述立柱调整支架;
[0018]
继续下吊预制立柱,直至所述立柱调整支架与所述电动液压千斤顶顶紧。
[0019]
通过设置立柱调整支架进行预制立柱的调整,且立柱调整支架通过电动液压千斤顶驱动,使得在进行预制立柱的调整时,能够通过控制端控制电动液压千斤顶进行调整,从而实现预制立柱的自动调整,有利于提高调整效率和调整精度。
[0020]
具体的,在本方案中,立柱调整支架采用1.5cm厚钢板焊接而成,使用m20普通螺栓安装至立柱预埋灌浆套筒上,在两侧设置加强肋,保证调整支架在施工过程中不变形。
[0021]
进一步地,所述的在预制立柱接近地面时,暂停预制立柱的下吊,并预制立柱的下方安装所述立柱调整支架,具体包括:
[0022]
在预制立柱四个侧面的下方分别安装对应的所述立柱调整支架;
[0023]
所述的根据所述第一偏差对预制立柱进行粗调,具体包括:
[0024]
根据所述第一偏差分别控制四个所述电动液压千斤顶从四个方向对预制立柱进行粗调;
[0025]
所述的根据所述第二偏差对预制立柱进行精调,具体包括:
[0026]
根据所述第二偏差分别控制四个所述电动液压千斤顶从四个方向对预制立柱进行精调。
[0027]
通过设置四个立柱调整支架,且四个电动液压千斤顶独立控制,能够从四个方向对预制立柱进行粗调或精调,且调整的精度更高。具体的,为了保证调整精度,四个立柱调整支架可以分别与在预制立柱四个侧面中央对应。
[0028]
进一步地,所述的根据预制立柱的施工图建立三维模型,并提取所述三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据,具体包括:
[0029]
通过总控计算机建立三维模型,并提取所述三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据;
[0030]
所述的通过自动测量机器人实时采集预制立柱的第一当前数据,具体包括:
[0031]
通过下位终端控制所述自动测量机器人实时采集预制立柱的第一当前数据,并将所述第一当前数据回传至所述总控计算机;
[0032]
所述的通过三维激光扫描仪对预制立柱进行扫描,获得预制立柱的第二当前数
据,具体包括:
[0033]
通过下位终端控制所述三维激光扫描仪对预制立柱进行扫描,获得预制立柱的第二当前数据,并将所述第二当前数据回传至所述总控计算机。
[0034]
进一步地,所述的将所述第一当前数据与所述参考数据进行比对,获得第一偏差,并根据所述第一偏差对预制立柱进行粗调,具体包括:
[0035]
通过所述总控计算机对所述第一当前数据和所述参考数据进行比对,获得第一偏差,并根据所述第一偏差向所述下位终端发送调整指令;
[0036]
所述下位终端根据调整指令控制所述电动液压千斤顶对预制立柱进行粗调;
[0037]
所述的将所述第二当前数据与所述参考数据进行比对,获得第二偏差,并根据所述第二偏差对预制立柱进行精调,具体包括:
[0038]
通过所述总控计算机对所述第二当前数据和所述参考数据进行比对,获得第二偏差,并根据所述第二偏差向所述下位终端发送调整指令;
[0039]
所述下位终端根据调整指令控制所述电动液压千斤顶对预制立柱进行精调。
[0040]
本方案通过总控计算机进行三维建模,以及数据的比对、分析和计算等,并通过下位终端,如平板电脑等进行现场的调整控制,能够便于安装现场的及时进行,以及高架桥预制立柱安装的总体控制,同时,还可以便于对个预制立柱进行同时安装,有利于提高安装效率。当然,也可以将总控计算机和下位终端合二为一,但这样不利于远端的总体调控。
[0041]
具体的,可以在施工现场或现场外设置一台立柱调整总控计算机,并将电动液压千斤顶、三维激光扫描仪、自动测量机器人与该计算机连接(按现场条件选择无线或有线连接),保证施工数据信息能够通过该计算机进行分析处理。总控计算机完成数据处理后,将数据传送至下位终端,如平板电脑,现场施工人员通过平板电脑对现场的设备进行操控。
[0042]
进一步地,所述的根据预制立柱施工图建立三维模型之后,提取所述三维模型内立柱的施工信息之前,还包括步骤:
[0043]
对所述三维模型进行钢筋预埋件和预留孔洞的碰撞检查;
[0044]
若存在碰撞或错误,则对所述三维模型进行优化,直至碰撞或错误消失,获得优化三维模型。
[0045]
通过对三维模型进行钢筋预埋件和预留孔洞的碰撞检查,能够不断对三维模型进行优化,从而提高预制立柱的安装精度。
[0046]
进一步地,所述的根据所述第二偏差对预制立柱进行精调之后,还包括:
[0047]
对预制立柱进行灌浆处理;
[0048]
待灌浆完成后,拆除所述立柱调整支架和所述电动液压千斤顶,完成立柱吊装。
[0049]
另外,本发明还提供一种高架桥预制立柱安装自动调整系统,包括:
[0050]
总控计算机,用于根据预制立柱的施工图建立三维模型,并提取所述三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据;
[0051]
自动测量机器人;
[0052]
三维激光扫描仪;
[0053]
下位终端,用于在预制立柱下吊过程中,控制自动测量机器人实时采集预制立柱的第一当前数据,并将所述第一当前数据回传至所述总控计算机;
[0054]
其中,所述总控计算机对所述第一当前数据和所述参考数据进行比对,获得第一
偏差,并根据所述第一偏差向所述下位终端发送调整指令,所述下位终端根据调整指令对预制立柱进行粗调;
[0055]
所述下位终端还用于在粗调后,控制三维激光扫描仪对预制立柱进行扫描,获得预制立柱的第二当前数据,并将所述第二当前数据回传至所述总控计算机,所述总控计算机对所述第二当前数据和所述参考数据进行比对,获得第二偏差,并根据所述第二偏差向所述下位终端发送调整指令,所述下位终端根据调整指令对预制立柱进行精调。
[0056]
进一步地,还包括:
[0057]
立柱调整支架,安装在预制立柱的下方,且所述立柱调整支架通过电动液压千斤顶驱动;
[0058]
所述下位终端根据调整指令控制所述电动液压千斤顶对预制立柱进行粗调或精调。
[0059]
进一步地,所述立柱调整支架的数量为四个,且分别设置在预制立柱四个侧面的下方,用于分别从四个方向对预制立柱进行调整。
[0060]
通过本发明提供的一种高架桥预制立柱安装自动调整方法及系统,由于本方案是在立柱吊装的过程中,实现预制立柱偏差的自动测量以及对应的粗调和精调,能够减少安装过程中的人为干预,有利于提高预制立柱的安装效率,且通过先粗调后精调的方式,能够使预制立柱的调整精度更高,有利于保证高架桥的质量。
附图说明
[0061]
下面将以明确易懂的方式,结合附图说明优选实施方式,对本方案的上述特性、技术特征、优点及其实现方式予以进一步说明。
[0062]
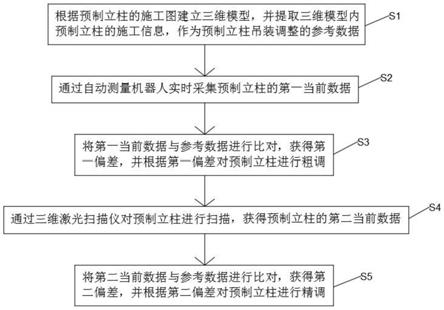
图1是本发明一个实施例的流程示意图;
[0063]
图2是本发明另一个实施例的流程示意图;
[0064]
图3是本发明实施例的控制结构示意图。
[0065]
图中标号:1-总控计算机;2-下位终端;3-自动测量机器人;4-三维激光扫描仪;5-电动液压千斤顶。
具体实施方式
[0066]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
[0067]
为使图面简洁,各图中只示意性地表示出了与本发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
[0068]
实施例1
[0069]
本发明的一个实施例,如图1所示,本发明提供一种高架桥预制立柱安装自动调整方法,包括步骤:
[0070]
s1、根据预制立柱的施工图建立三维模型,并提取三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据。
[0071]
优选的,在根据预制立柱施工图建立三维模型之后,提取三维模型内立柱的施工信息之前,还包括步骤:
[0072]
对三维模型进行钢筋预埋件和预留孔洞的碰撞检查;若存在碰撞或错误,则对三维模型进行优化,直至碰撞或错误消失,获得优化三维模型。
[0073]
通过对三维模型进行钢筋预埋件和预留孔洞的碰撞检查,能够不断对三维模型进行优化,从而提高预制立柱的安装精度。
[0074]
s2、通过自动测量机器人实时采集预制立柱的第一当前数据。
[0075]
具体的,在本方案中,自动测量机器人布置在吊装立柱旁5-10米处。
[0076]
s3、将第一当前数据与参考数据进行比对,获得第一偏差,并根据第一偏差对预制立柱进行粗调。
[0077]
s4、通过三维激光扫描仪对预制立柱进行扫描,获得预制立柱的第二当前数据。
[0078]
具体的,在本方案中,三维激光扫描仪的扫描仪精度为0.1mm。
[0079]
s5、将第二当前数据与参考数据进行比对,获得第二偏差,并根据第二偏差对预制立柱进行精调。
[0080]
通过预制立柱的施工图能够建立对应的三维模型,具体可以为bim(建筑信息模型),提取三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据;在预制立柱下吊过程中,可以通过自动测量机器人实时采集预制立柱的第一当前数据,包括坐标、垂直度等数据,将第一当前数据与参考数据进行比对,能够获得预制立柱的第一偏差,之后便能够根据第一偏差对预制立柱进行粗调;粗调之后,再通过三维激光扫描仪对预制立柱进行扫描,能够获得更精准的预制立柱的第二当前数据,将第二当前数据与参考数据进行比对,能够获得更精准的第二偏差,之后便可以根据第二偏差对预制立柱进行精调。由于本方案是在立柱吊装的过程中,实现预制立柱偏差的自动测量以及对应的粗调和精调,能够减少安装过程中的人为干预,有利于提高预制立柱的安装效率,且通过先粗调后精调的方式,能够使预制立柱的调整精度更高,有利于保证高架桥的质量。
[0081]
实施例2
[0082]
本发明的一个实施例,如图2所示,在实施例1的基础上,提取三维模型内预制立柱的施工信息之后,通过自动测量机器人实时采集预制立柱的第一当前数据之前,还包括步骤:
[0083]
s11、根据预制立柱的施工信息确定立柱调整支架的位置,立柱调整支架通过电动液压千斤顶驱动。
[0084]
s12、在预制立柱运抵施工现场后,通过吊车缓慢下吊预制立柱,在预制立柱接近地面时,暂停预制立柱的下吊,并在预制立柱的下方安装立柱调整支架。
[0085]
s13、继续缓慢下吊预制立柱,直至立柱调整支架与电动液压千斤顶顶紧。
[0086]
通过设置立柱调整支架进行预制立柱的调整,且立柱调整支架通过电动液压千斤顶驱动,使得在进行预制立柱的调整时,能够通过控制端控制电动液压千斤顶进行调整,从而实现预制立柱的自动调整,有利于提高调整效率和调整精度。
[0087]
具体的,在本方案中,立柱调整支架采用1.5cm厚钢板焊接而成,使用m20普通螺栓
安装至立柱预埋灌浆套筒上,在两侧设置加强肋,保证调整支架在施工过程中不变形。
[0088]
优选的,在预制立柱接近地面时,暂停预制立柱的下吊,并预制立柱的下方安装立柱调整支架,具体包括:在预制立柱四个侧面的下方分别安装对应的立柱调整支架。
[0089]
根据第一偏差对预制立柱进行粗调,具体包括:根据第一偏差分别控制四个电动液压千斤顶从四个方向对预制立柱进行粗调;
[0090]
根据第二偏差对预制立柱进行精调,具体包括:根据第二偏差分别控制四个电动液压千斤顶从四个方向对预制立柱进行精调。
[0091]
通过设置四个立柱调整支架,且四个电动液压千斤顶独立控制,能够从四个方向对预制立柱进行粗调或精调,且调整的精度更高。具体的,为了保证调整精度,四个立柱调整支架可以分别与在预制立柱四个侧面中央对应。
[0092]
优选的,根据预制立柱的施工图建立三维模型,并提取三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据,具体包括:通过总控计算机建立三维模型,并提取三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据。
[0093]
通过自动测量机器人实时采集预制立柱的第一当前数据,具体包括:通过下位终端控制自动测量机器人实时采集预制立柱的第一当前数据,并将第一当前数据回传至总控计算机。
[0094]
通过三维激光扫描仪对预制立柱进行扫描,获得预制立柱的第二当前数据,具体包括:通过下位终端控制三维激光扫描仪对预制立柱进行扫描,获得预制立柱的第二当前数据,并将第二当前数据回传至总控计算机。
[0095]
进一步优选的,将第一当前数据与参考数据进行比对,获得第一偏差,并根据第一偏差对预制立柱进行粗调,具体包括:通过总控计算机对第一当前数据和参考数据进行比对,获得第一偏差,并根据第一偏差向下位终端发送调整指令;下位终端根据调整指令控制电动液压千斤顶对预制立柱进行粗调;
[0096]
将第二当前数据与参考数据进行比对,获得第二偏差,并根据第二偏差对预制立柱进行精调,具体包括:通过总控计算机对第二当前数据和参考数据进行比对,获得第二偏差,并根据第二偏差向下位终端发送调整指令;下位终端根据调整指令控制电动液压千斤顶对预制立柱进行精调。
[0097]
本方案通过总控计算机进行三维建模,以及数据的比对、分析和计算等,并通过下位终端,如平板电脑等进行现场的调整控制,能够便于安装现场的及时进行,以及高架桥预制立柱安装的总体控制,同时,还可以便于对个预制立柱进行同时安装,有利于提高安装效率。当然,也可以将总控计算机和下位终端合二为一,但这样不利于远端的总体调控。
[0098]
具体的,可以在施工现场或现场外设置一台立柱调整总控计算机,并将电动液压千斤顶、三维激光扫描仪、自动测量机器人与该计算机连接(按现场条件选择无线或有线连接),保证施工数据信息能够通过该计算机进行分析处理。总控计算机完成数据处理后,将数据传送至下位终端,如平板电脑,现场施工人员通过平板电脑对现场的设备进行操控。
[0099]
优选的,根据第二偏差对预制立柱进行精调之后,还包括:对预制立柱进行灌浆处理;待灌浆完成后,拆除立柱调整支架和电动液压千斤顶,完成立柱吊装。
[0100]
实施例3
[0101]
本发明的一个实施例,如图3所示,本发明还提供一种高架桥预制立柱安装自动调
整系统,包括:总控计算机1、下位终端2、自动测量机器人3和三维激光扫描仪4。
[0102]
总控计算机1用于根据预制立柱的施工图建立三维模型,并提取三维模型内预制立柱的施工信息,作为预制立柱吊装调整的参考数据。
[0103]
优选的,在得到三维模型之后,还包括对三维模型进行钢筋预埋件和预留孔洞的碰撞检查;若存在碰撞或错误,则对三维模型进行优化,直至碰撞或错误消失,获得优化三维模型。
[0104]
通过对三维模型进行钢筋预埋件和预留孔洞的碰撞检查,能够不断对三维模型进行优化,从而提高预制立柱的安装精度。
[0105]
下位终端2用于在预制立柱下吊过程中,控制自动测量机器人3实时采集预制立柱的第一当前数据,并将第一当前数据回传至总控计算机1。
[0106]
总控计算机1对第一当前数据和参考数据进行比对,获得第一偏差,并根据第一偏差向下位终端2发送调整指令,下位终端2根据调整指令对预制立柱进行粗调。
[0107]
下位终端2还用于在粗调后,控制三维激光扫描仪4对预制立柱进行扫描,获得预制立柱的第二当前数据,并将第二当前数据回传至总控计算机1,总控计算机1对第二当前数据和参考数据进行比对,获得第二偏差,并根据第二偏差向下位终端2发送调整指令,下位终端2根据调整指令对预制立柱进行精调。
[0108]
由于本方案是在立柱吊装的过程中,实现预制立柱偏差的自动测量以及对应的粗调和精调,能够减少安装过程中的人为干预,有利于提高预制立柱的安装效率,且通过先粗调后精调的方式,能够使预制立柱的调整精度更高,有利于保证高架桥的质量。
[0109]
优选的,该系统还包括立柱调整支架。立柱调整支架安装在预制立柱的下方,且立柱调整支架通过电动液压千斤顶5驱动。
[0110]
具体的,在本方案中,立柱调整支架采用1.5cm厚钢板焊接而成,使用m20普通螺栓安装至立柱预埋灌浆套筒上,在两侧设置加强肋,保证调整支架在施工过程中不变形。
[0111]
下位终端2根据调整指令控制电动液压千斤顶5对预制立柱进行粗调或精调。
[0112]
优选的,立柱调整支架的数量为四个,且分别设置在预制立柱四个侧面的下方,用于分别从四个方向对预制立柱进行调整。
[0113]
应当说明的是,上述实施例均可根据需要自由组合。以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1