一种双棱镜轨检小车测量系统及其方法与流程
:
1.本发明涉及轨道检测技术领域,尤其涉及一种双棱镜轨检小车测量系统及其方法。
背景技术:
:
2.轨检小车由轨距、水平等测量装置与机身棱镜及工控机组成的测量小车和高精度全站仪、无线通讯单元等组成,检测铁路轨道内部几何状态(轨距、水平、轨向、高低、正失扭曲)和外部几何状态(轨道中线偏差、高程偏差)的测量装置。对高速铁路道床结构的铺设、长轨铺设、长钢轨精调和后期维护有着重要意义。
3.传统的轨检小车采用一个基准棱镜对小车中心进行测量,接着通过两个倾角传感器测量出横向和纵向倾角得到小车姿态,最后反向计算轨道被测点的位置。测量中,除了需要通过全站仪测得棱镜的方向和角度,还需要增加一个高精度水准仪,在轨道的几何状态检测中,电子水准仪不仅直接影响高程差的计算,还影响了小车的姿态,进而影响轨向和高低的测量值。但是电子水准仪由于安装、不稳定以及环境因素会导致误差,影响测量精度,且价格也比较昂贵。
技术实现要素:
:
4.本发明的目的在于提供一种双棱镜轨检小车测量系统及其方法,以解决现有技术的不足。
5.本发明由如下技术方案实施:一种双棱镜轨检小车测量系统,包括安装在铁轨上的小车、全站仪、一个里程测量传感器、一个轨距测量传感器、一个倾角传感器、斜向推杆、推柄和工控机,其特征在于:还包括两个检测棱镜,所述两个检测棱镜分别在竖直方向上间隔一定距离安装在小车横梁上部,所述两个检测棱镜在竖直方向的投影和小车中心重合。
6.优选的,所述两个检测棱镜在竖直方向的间隔距离不小于30cm。
7.本发明还提供一种双棱镜轨检小车测量方法,包括以下步骤:
8.s1、将小车放置在待测铁轨上,在小车横梁上部安装两个检测棱镜,所述两个检测棱镜分别在竖直方向上间隔一定距离安装在小车横梁上部,所述两个检测棱镜在竖直方向的投影和小车中心重合;
9.s2、利用全站仪采集所述两个棱镜在第一测量点的三维空间坐标,并计算得到两个棱镜中心处的三维空间坐标,具体为:
10.第一测量点上棱镜中心:(x1
up
,y1
up
,h1
up
);
11.第一测量点下棱镜中心:(x1
down
,y1
down
,h1
down
);
12.第一测量点双棱镜中心:(x1
middle
,y1
middle
,h1
middle
)
13.其中,
14.x1
middle
=(x1
up
+x1
down
)/2;
15.y1
middle
=(y1
up
+y1
down
)/2;
16.h1
middle
=(h1
up
+h1
down
)/2;
17.s3、将小车往前推动一段距离d,再次记录下此时所述两个棱镜在第二测量点的三维空间坐标,并计算得到此时两个棱镜中心处的三维空间坐标,具体为:
18.第二测量点上棱镜中心:(x2
up
,y2
up
,h2
up
);
19.第二测量点下棱镜中心:(x2
down
,y2
down
,h2
down
);
20.第二测量点双棱镜中心:(x2
middle
,y2
middle
,h2
middle
);
21.其中,
22.x2
middle
=(x2
up
+x2
down
)/2;
23.y2
middle
=(y2
up
+y2
down
)/2;
24.h2
middle
=(h2
up
+h2
down
)/2;
25.s4、将步骤s2和步骤s3计算得到的两个棱镜中点处的三维空间坐标连接,作为轨检小车的行进方向;
26.s5、根据所述小车的行进方向进行角度运算,计算所述两个棱镜的连接线在第一测量点的横向倾角和纵向倾角;
27.s6、根据所述步骤s1
‑
s5的方法依次类推,计算小车在第二测量点到第n测量点的横向倾角和纵向倾角。
28.优选的,还包括将所述横向倾角和电子水准仪的测试结果进行融合,结合实测轨距,计算出轨道检测点的轨面高程差,如果所述轨面高程差过大,则报警。
29.优选的,还包括:根据所述横向倾角、纵向倾角,反算出小车的刚体方程的六个参数,解出小车姿态,通过拟合的轨道空间曲线,计算轨道的轨向和高低。
30.优选的,所述根据所述小车的行进方向进行角度运算,计算第一测量点的横向倾角和纵向倾角,具体为:
31.将小车的行进方向表示为两次棱镜中心连接成的向量:
[0032][0033]
将小车的行进方向在水平面的投影表示为:
[0034][0035]
将小车横梁在水平面的投影表示为:
[0036][0037]
将第一测量点的双棱镜所组成的倾角向量在水平面的投影表示为:
[0038][0039]
则第一测量点的双棱镜所组成的倾角向量在水平横梁方向的投影值表示为:
[0040][0041]
第一测量点的双棱镜所组成的倾角向量在水平行进方向的投影值为:
[0042][0043]
第一测量点的横向倾角α的正切值为:
[0044][0045]
第一测量点的纵向倾角β的正切值为:
[0046][0047]
第一测量点的横向倾角α、纵向倾角β分别为:
[0048][0049][0050]
本发明的优点:
[0051]
1、本发明结构简单,在保证精度的情况下,降低成本。避免由于电子水准仪的单点误差对高程差、轨向、高低产生一系列影响。
[0052]
2、本发明若小车出现一定程度的倾斜变形,可通过倾角传感器和计算的横向倾角误差进行报警。
附图说明:
[0053]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0054]
图1为本发明实施例的一种双棱镜轨检小车测量系统的双检测棱镜横向倾角示意图;
[0055]
图2为本发明实施例的一种双棱镜轨检小车测量系统的双检测棱镜纵向倾角示意图;
[0056]
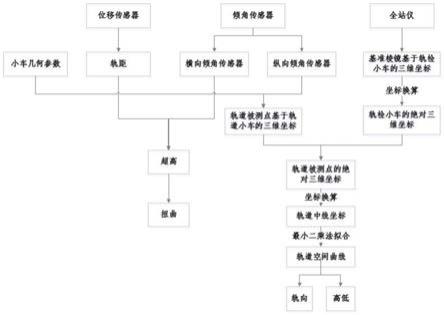
图3为本发明实施例的一种双棱镜轨检小车测量方法流程示意图。
具体实施方式:
[0057]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0058]
实施例1
[0059]
本实施例提供一种双棱镜轨检小车测量系统,包括安装在铁轨上的小车、全站仪、一个里程测量传感器、一个轨距测量传感器、一个倾角传感器、斜向推杆、推柄和工控机,其特征在于:还包括两个检测棱镜,两个检测棱镜分别在竖直方向上间隔一定距离安装在小车横梁上部,两个检测棱镜在竖直方向的投影和小车中心重合。
[0060]
对于超高检测,需要获取轨道横截面上的倾斜角度并通过三角函数关系换算出来。如图1、2所示,采用在轨道检测小车横梁底部安放倾角传感器,保证其与横梁底部平行,测量出轨检小车的横向倾角α和纵向倾角β的测量方案。结合两侧钢轨顶面中心点之间的距离l求出轨道的超高值h,计算公式为:h=l*sinα。沿线路方向,规定左转曲线超高为负,右转曲线超高为正,得到轨道的实测超高值后,进一步与设置值进行比较,判断超高是否符合要求。
[0061]
本发明采用的方案中,两个检测棱镜在竖直方向的间隔距离不小于30cm。
[0062]
本实施例可利用全站仪测量小车上的两个测试棱镜三维坐标,并通过在轨道上将小车前进一段距离后,再次测量小车上的两个测试棱镜三维坐标,进而最终反算出小车的横向倾角和前进方向的纵向倾角,修正由倾角传感器单独计算得到的轨道左、右钢轨的高程差。利用纵向倾角,可以更精确地估计小车的位置和姿态,在不增加更多传感器的情况下,提高检测精度。
[0063]
另外,轨距测量传感器可选用直线位移传感器ktm
‑
100mm,倾角传感器选用sang3000系列双轴传感器,全站仪选用tca2003型全站仪。
[0064]
实施例2
[0065]
本实施例还提供一种双棱镜轨检小车测量方法,包括以下步骤:
[0066]
s1、将小车放置在待测铁轨上,在小车横梁上部安装两个检测棱镜,两个检测棱镜分别在竖直方向上间隔一定距离安装在小车横梁上部,两个检测棱镜在竖直方向的投影和小车中心重合;
[0067]
s2、利用全站仪采集两个棱镜在第一测量点的三维空间坐标,并计算得到两个棱镜中心处的三维空间坐标,具体为:
[0068]
第一测量点上棱镜中心:(x1
up
,y1
up
,h1
up
);
[0069]
第一测量点下棱镜中心:(x1
down
,y1
down
,h1
down
);
[0070]
第一测量点双棱镜中心:(x1
middle
,y1
middle
,h1
middle
)
[0071]
其中,
[0072]
x1
middle
=(x1
up
+x1
down
)/2;
[0073]
y1
middle
=(y1
up
+y1
down
)/2;
[0074]
h1
middle
=(h1
up
+h1
down
)/2;
[0075]
s3、将小车往前推动一段距离d,再次记录下此时两个棱镜在第二测量点的三维空
间坐标,并计算得到此时两个棱镜中心处的三维空间坐标,具体为:
[0076]
第二测量点上棱镜中心:(x2
up
,y2
up
,h2
up
);
[0077]
第二测量点下棱镜中心:(x2
down
,y2
down
,h2
down
);
[0078]
第二测量点双棱镜中心:(x2
middle
,y2
middle
,h2
middle
);
[0079]
其中,
[0080]
x2
middle
=(x2
up
+x2
down
)/2;
[0081]
y2
middle
=(y2
up
+y2
down
)/2;
[0082]
h2
middle
=(h2
up
+h2
down
)/2;
[0083]
s4、将步骤s2和步骤s3计算得到的两个棱镜中点处的三维空间坐标连接,作为轨检小车的行进方向;
[0084]
s5、根据小车的行进方向进行角度运算,计算两个棱镜的连接线在第一测量点的横向倾角和纵向倾角,具体为:
[0085]
小车的行进方向可以表示为两次棱镜中心连接成的向量:
[0086][0087]
小车的行进方向在水平面的投影为:
[0088][0089]
将小车横梁在水平面的投影表示为:
[0090][0091]
行进了一小段距离,可认为小车的横梁和行进方向在水平面的投影垂直,即
[0092]
第一测量点的双棱镜所组成的倾角向量在水平面的投影为:
[0093][0094]
则第一测量点的双棱镜所组成的倾角向量在水平横梁方向的投影值表示为:
[0095][0096]
第一测量点的双棱镜所组成的倾角向量在水平行进方向的投影值为:
[0097][0098]
第一测量点的横向倾角α的正切值为:
[0099][0100]
第一测量点的纵向倾角β的正切值为:
[0101][0102]
第一测量点的横向倾角α、纵向倾角β分别为:
[0103][0104][0105]
由此,求得横向倾角α和纵向倾角β,要修正第二测量点的横向和纵向倾角需要第三测量点的数据,以此类推,可得到后续每一个测量点的横向、纵向倾斜角数据。根据图3进行坐标换算,并结合轨道检测小车及全站仪的几何参数,得到轨道检测小车的6个刚体坐标,进一步计算轨道被测点的三维坐标,通过散点拟合轨道空间曲线,最后得到轨向和高低值。得到横向、纵向倾角以后的坐标换算,按一般的求解6个刚体坐标计算即可
[0106]
s6、根据步骤s1
‑
s5的方法依次类推,计算小车在第二测量点到第n测量点的横向倾角和纵向倾角。
[0107]
另外,还包括将横向倾角和电子水准仪的测试结果进行融合,结合实测轨距,计算出轨道检测点的轨面高程差,如果轨面高程差过大,则报警。如图1所示,实测轨距为l,则轨面高程差h=l*sinα,当h大于一定的轨道标准值,则报警。
[0108]
另外,还包括:根据横向倾角、纵向倾角,反算出小车的刚体方程的六个参数,解出小车姿态,通过拟合的轨道空间曲线,计算轨道的轨向和高低,反算出小车的刚体方程的六个参数具体为:
[0109]
自由刚体的空间位置需要6个参数来确定,即6个刚体坐标。确定轨道检测小车的位置,即确定轨道检测小车坐标系csyl在绝对坐标系csy0下的坐标和角度,需确定x0’,y0’,z0’,以及ψ,φ,θ六个刚体坐标。
[0110]
由于基准棱镜的绝对坐标(xl,y1,z1)和(x2,y2,z2)已知,只需通过两个全站仪分别测得两个基准棱镜在全站仪坐标系中的坐标值(xl”,y1”,zl”)和(x2”,y2”,z2”),进一步计算得到基准棱镜在轨道检测小车坐标系csyl中的坐标值(x1’,y1’,z1’)和(x2’,y2’,z2’),结合倾角传感器测得的纵向倾角β和横向倾角α,可得到六个刚体坐标。
[0111]
由刚体运动规律:
[0112]
x=x0’+α1x’+α2y’+α3z’[0113]
y=y0’+β1x’+β2y’+β3z’[0114]
z=z0’+γ1x’+γ2y’+γ3z’[0115]
其中,(x,y,z)为基准棱镜的绝对坐标值,即在绝对坐标系csy0中的坐标值;(x’,
y’,z’)为基准棱镜在轨道检测小车坐标系csyl的坐标值;(x0’,y0’,z0’)为轨道检测小车坐标系csyl在绝对坐标系csy0的坐标值;α1,β1,γ1,α2,β2,γ2,α3,β3,γ3分别为绝对坐标系csy0的x轴、y轴、z轴分别与轨道检测小车坐标系x’轴、y’轴、z’轴的方向余弦,其计算如下所示:
[0116]
α1=cosψcosφ
‑
sinψsinφcosθ
[0117]
β1=sinψcosφ+cosψsinφcosθ
[0118]
γ1=sinθsinφ
[0119]
α2=
‑
cosψsinφ
‑
sinψcosφcosθ
[0120]
β2=
‑
sinψsinφ+cosψcosφcosθ
[0121]
γ2=sinθcosφ
[0122]
α3=sinθsinψ
[0123]
β3=
‑
sinθcosψ
[0124]
γ3=cosθ
[0125]
结合双轴倾角传感器测量得到的两个方向角度α和β,有:
[0126]
γ1=cos(90
°‑
β),γ2=cos(90
°‑
α)
[0127]
综上所述,可计算并确定轨道检测小车的六个刚体坐标的表达式:
[0128][0129][0130][0131]
其中,a=[(xl
”‑
x2”)cosφ
‑
(y1
”‑
y2
”‑
2s1)sinψ]
[0132]
b=
‑
(xl
”‑
x2”)sinφcosθ
‑
(y1
”‑
y2
”‑
2s1)cosφcosθ+(z1
”‑
z2”)sinθ
[0133]
x0’=x1
‑
(cosψcosφ
‑
sinψsinφcosθ)x1’+(cosψsinφ+sinψcosφcosθ)(y1
”‑
s1)
‑
(sinθsinψ)(z1”+s2)
[0134]
y0’=y1
‑
(sinψcosφ+cosψsinφcosθ)xl”+(sinψsinφ
‑
cosψcosφcosθ)(y1
”‑
s1)+(sinθcosψ)(z1”+s2)
[0135]
z0’=z1
‑
γ1xl
”‑
γ2(y1
”‑
s1)
‑
[(z1
‑
z2)
‑
γ1(x1
”‑
x2”)
‑
γ1(y1
”‑
y2
”‑
2s1)]/[zl
”‑
z2”]*(zl”+s2)
[0136]
上述的s1、s2来自:全站仪坐标系原点到轨道检测小车坐标系原点在x’方向上的距离定义为o,y’方向上的距离定义为s1,z’方向上的距离定义为s2。
[0137]
另外,本发明采用双棱镜的结果方式计算小车的横向倾角和前进方向的纵向倾角,不仅可以替代一个倾角传感器的功能,还可以提高检测精度。在某些特殊情况下,若小车出现一定程度的变形,可以通过倾角传感器和计算得到的横向倾角误差进行报警。用双棱镜检测可以辅助甚至替代电子水准仪,将高程运算和轨向、高低统一到全站仪的数据,具有更好的数据一致性。
[0138]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1