一种护栏台车整装控制方法及系统与流程
1.本发明涉及一种护栏台车整装控制方法及系统,属于专用于架设或装配桥梁的方法或设备。
背景技术:
2.现有技术中对于护栏台车,一般都仅实现了机械化,如申请号为 cn201810339504.4的中国发明专利公开的一种隧道边沟和桥梁护栏混凝施工的组合机械台车装置,虽然能够做到模板拆装的适配,但是由于其过多采用柔性结构,以至于需要施工人员现场操作并为此设置有人员站立位,整个护栏施工过程不能自动化,整体施工效率低下。
3.为解决上述问题,申请人设计了一种自动护栏台车(已另外申请专利),但对应的,由于现有技术中的技术方案都无法实现全过程电控操作,因此现有技术中也没有对应的远程控制或自动化控制的方案。
技术实现要素:
4.为解决上述技术问题,本发明提供了一种护栏台车整装控制方法,该护栏台车整装控制方法能实现对护栏台车无现场操作的控制,大幅提高整体施工效率。本发明通过以下技术方案得以实现。
5.本发明提供的一种护栏台车整装控制方法,包含如下步骤:
6.行进:控制行进系统,使模板系统到达预定位置;
7.支模:通过对伸缩组件的控制,操作伸缩组件中的伸缩机构,使模板系统成为预定形状;
8.浇筑:启动浇筑系统或发送浇筑信号;
9.振捣:启动振捣器。
10.所述浇筑步骤中,启动浇筑系统的同时使能振捣系统中的传感器,传感器获取到高度信号则进入振捣步骤。
11.所述振捣步骤中,启动振捣器的同时启动定时器,根据定时器到期信号关停振捣器。
12.所述振捣步骤之后,还包括如下步骤:
13.脱模:通过对液压系统的控制,操作液压缸组中的液压缸,使模板系统分离脱开。
14.在所述行进步骤中,根据视频监控的图像数据,对行进系统的操作控制进行调整。
15.在支模步骤中,从液压系统中获取每一液压缸的位置数据,根据液压缸的安装坐标向量将液压缸的位置数据解析为模板系统的姿态信息。
16.模板系统的姿态信息通过人机交互界面hmi显示。
17.所述行进步骤中,预定位置从预先导入的设计图提取。
18.所述支模步骤中,预定形状从预先导入的设计图提取。
19.所述伸缩组件为液压系统,伸缩机构为液压缸。
20.本发明还提供一种护栏台车整装控制系统,包括:存储器和处理器;
21.所述处理器用于执行所述存储器内存储的计算机程序,以实现权利要求1
‑
10任一项所述的护栏台车整装控制方法。
22.本发明的有益效果在于:能够实现对护栏台车无现场操作的控制,从而大幅降低人力成本、减少人员现场操作的风险,便于以半自动化的方式进行调试、以自动化的方式批量施工,大幅提高整体施工效率。
附图说明
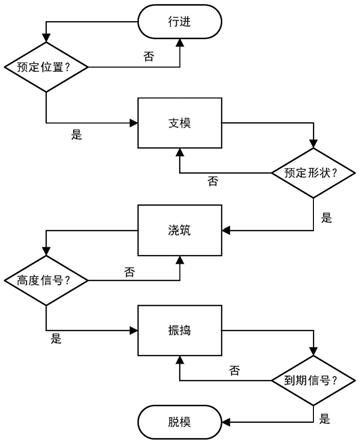
23.图1是本发明的流程示意图;
24.图2是本发明一种实施方式所对应的系统连接示意图;
25.图3是本发明另一种实施方式所对应的系统连接示意图;
26.图4是本发明一种实施方式所对应的结构示意图;
27.图5是图4的侧视图。
28.图中:11
‑
门架,12
‑
行走系统,13
‑
液压缸,14
‑
液压系统,15
‑
模板系统,16
‑
振捣系统,21
‑
发电机,22
‑
控制中心,23
‑
视频监控。
具体实施方式
29.下面进一步描述本发明的技术方案,但要求保护的范围并不局限于所述。
30.如图1所示的一种护栏台车整装控制方法,包含如下步骤:
31.行进:控制行进系统,使模板系统到达预定位置;
32.支模:通过对伸缩组件的控制,操作伸缩组件中的伸缩机构,使模板系统15成为预定形状;
33.浇筑:启动浇筑系统或发送浇筑信号;
34.振捣:启动振捣器。
35.基于此,从整机启动到护栏浇筑施工完成的整个过程,可以通过电控系统实现上述步骤从而实现自动化或半自动化,也可将上述步骤作为操作人员的标准远程操作步骤实现标准化方便控制施工质量。
36.浇筑步骤中,启动浇筑系统的同时使能振捣系统中的传感器,传感器获取到高度信号则进入振捣步骤。
37.振捣步骤中,启动振捣器的同时启动定时器,根据定时器到期信号关停振捣器。
38.振捣步骤之后,还包括如下步骤:
39.脱模:通过对液压系统的控制,操作液压缸组中的液压缸,使模板系统分离脱开。
40.作为本发明的一种优选方案,如本发明所应用的系统中装有视频监控系统,则在行进步骤中,根据视频监控的图像数据,对行进系统的操作控制进行调整。
41.作为本发明的一种优选方案,为便于进一步的自动化精确调整,在支模步骤中,从液压系统中获取每一液压缸的位置数据,根据液压缸的安装坐标向量将液压缸的位置数据解析为模板系统的姿态信息。
42.模板系统的姿态信息通过人机交互界面hmi显示。
43.作为进一步脱离操作人员的自动化优选方案,行进步骤中,预定位置从预先导入的设计图提取;支模步骤中,预定形状从预先导入的设计图提取。
44.具体而言,伸缩组件一般可采用液压系统、电磁伸缩杆组件等,而作为伸缩组件的最佳方案,伸缩组件为液压系统,伸缩机构为液压缸。
45.作为上述方案在具体实施中:
46.行进系统的控制可通过定位导航实现,在行进系统中安装一gps北斗导航双模定位模组(如ht1818z3g5l)并通信即可。
47.支模可以通过将伸缩机构的伸缩位置数据结合伸缩机构的安装位置进行解析得到模板系统的姿态信息,即伸缩机构的安装位置在数据层面包括固定位置(三维坐标)、方向(三维向量)、长度范围,共计8个数值,而伸缩位置数据则可体现为在长度范围内的一个具体数值,将多个伸缩机构的上述数据通过坐标系转换后即可得到所需姿态信息。
48.浇筑系统和振捣器均为现有技术中的现成产品,启动浇筑系统和启动振捣器的过程即为向产品发送开关量即可,根据产品的启动方式(部分产品是高电平启动,部分产品是低电平启动,还有部分产品是多引脚配置启动)在系统中设定。
49.同时,模板系统和振捣器必然在护栏台车上,但浇注系统很可能在护栏台车之外,在设备范围划分上浇注系统并不属于护栏台车,因此电路连接上可能涉及跨域通信、跨网通信,因此本发明所应用的控制系统无法直接通过开关量启动或停止浇筑系统,此时则需要将浇筑启动信号用通信协议封装后,发送至浇筑系统,即发送浇筑信号。
50.实施例1
51.采用上述方案,应用于如图2所示的护栏台车整装控制系统,伸缩组件为电磁伸缩杆组件,伸缩机构为电磁伸缩杆,系统中装有视频监控系统,通过控制按钮对系统进行控制。
52.该实施例为本发明一种较为典型的半自动化实施方式,本发明提供的控制方法作为系统标准步骤,在操作人员的远程调整下进行,每一步骤的执行过程中等待操作人员确认后再继续进行后续过程,操作人员通过监控系统确定系统实际运行情况。
53.实施例2
54.采用上述方案,应用于如图3所示的护栏台车整装控制系统,伸缩组件为液压系统,伸缩机构为液压缸,系统通过hmi(人机交互界面)提供控制交互。该实施例为本发明一种较为典型的自动化实施方式,由于液压系统自带反馈功能,因此无需额外安装传感器即可获取每一液压缸的位置数据,从而可以实现将液压缸的位置数据解析为模板系统的姿态信息,进而可以实现整个过程的全自动,无需操作人员参与,模板系统的姿态信息通过hmi显示后可记录为历史数据,便于后续回放并排查故障。
55.由上述可见,基于半自动化的方式,便于系统调试,也便于在前期设计不完善的情况下完成护栏的浇筑施工,而基于自动化的方式便于规模化、设计完善的施工,无论何种方式,都无需现场操作人员辅助操作,大幅降低现场风险。本发明的具体实施,主要应用于如图4、图5所示的护栏台车,该护栏台车包括门架11、行走系统12、液压缸13、液压系统14、模板系统15、振捣系统 16,门架11通过安装行走系统12移动,门架11两侧安装模板系统15,模板系统15由多个液压缸13通过多点支撑控制形状,模板系统15上捆绑固定振捣系统16,液压缸13由门架11中部固定在液压系统14连接提供并伸缩动力,系统通过随行的发电机21供
电,在门架11上还安装控制中心22提供本地控制和远程通信,在门架11顶部安装视频监控23。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1