一种具有监测和自保护功能的车位锁的制作方法
1.本实用新型属于车位锁技术领域,具体涉及一种具有监测和自保护功能的紧凑型车位锁。
背景技术:
2.车位地锁是一种安装在地面上的机械装置,防止别人抢占车位,所以称为地锁,也叫车位锁。现有的有些车位锁在降低功耗方面设计有超声波检测车辆是否停在车位上用以关闭遥控器接收模块的工作来降低功耗,但此方法成本高,且超声波在发射和接收时要求两物距离一般要保持40cm以上,由于大部分轿车底盘的高度10-14cm之间,加之车位锁本身的高度最少也要5cm,所以10cm左右的距离对于超声波测距来说实现起来工艺复杂;现有的车位锁大部分都没有给重要零部件(蓄电池、线路板或太阳能电池板等)安装散热,有些地区夏季地表温度最高时超过80度,对产品的使用寿命大打折扣甚至损坏;还有现有的一些车位锁在其他车辆及物体移动对车位锁发生强烈的碰撞或者碾压时,车位锁设计不合理,造成主机或齿轮损坏;再如如果电量不足或损坏导致车位锁不能正常使用,此时没有极其方便的手动开锁方式,就会因过于繁琐而浪费时间;有些车位锁只能安装在平整的地面,适应能力差。
3.因此设计一种使用方便又灵活多变、适合多种地理环境、节能环保、安全可靠、紧凑的、具有红外监测功能车位锁主机的车位锁来解决上述问题。
技术实现要素:
4.为实现上述目的本实用新型提供了一种具有监测和保护功能的车位锁。
5.一种具有监测和保护功能的车位锁,其特征在于,包括减速齿轮箱1、电机3、凸缘,摇臂7、摇臂轴8、推动臂9、联动装置10、被锁定摆臂14、主轴15、随动臂16,随动臂传递轴17、联动臂18、联动轴19、锁定臂20、摆臂21、下降位置开关22、升起位置开关23、线路板24、锁舌25、钥匙锁体26、锁体转动臂27、动力传递缓冲扭簧28、抵消簧29、定位簧30、弹簧支撑轴31、底座32、主机壳33、左视窗34、右视窗35、右侧盖36、左侧盖37、挡车臂38、左输出轴39、右输出轴40、位置开关触碰螺丝46、回位簧47、电源48;
6.凸缘包括凸缘圆柱传动轴4、凸缘凹槽5、凸缘椭圆孔6,是在一片状结构上设有椭圆通孔即凸缘椭圆孔6,片状结构的侧面设有一弧状凹槽即凸缘凹槽5,片状结构一表面上固定有轴向垂直片装结构面的圆柱体即凸缘圆柱传动轴4,圆柱体的中心轴上设有轴配孔用于与减速箱输出轴2相匹配;
7.摇臂7为两端侧面均为半圆柱侧面的长方形片状结构,片状结构的一面设有圆柱状结构的摇臂轴输入端轴7001,摇臂轴输入端轴7001外侧套有臂轴输入端轴套7002;摇臂轴8的一端与摇臂7片状结构的一面固定成一体,同时摇臂轴8垂直摇臂7的片状结构,摇臂轴输入端轴7001与摇臂轴8位于摇臂7片状结构的同一面,且摇臂轴输入端轴7001垂直摇臂7 片状结构;摇臂轴8的另一端固定有长条片状结构的推动臂9;摇臂轴8的轴向垂直于推动
臂9的长条片状结构的面,推动臂9的长条片状结构的端部侧边设有凹槽;摇臂轴8相对固定且可绕自身轴转动;摇臂7的摇臂轴输入端轴7001与凸缘凹槽5接触匹配,摇臂轴输入端轴7001与凸缘圆柱传动轴4轴向平行;
8.联动装置10为一片状结构,片状结构长度方向的一端部侧边设有凹槽即联动装置推动槽11,联动装置推动槽11与垂直推动臂9的凹槽接触匹配,使得摇臂轴8绕自身轴转动时可推动联动装置10沿联动装置10的长度方向平行移动,且垂直推动臂9只能推动联动装置10沿单一方向运动;联动装置10 片状结构长度方向靠近另一端的侧部设有向上翘起的翼片即联动装置推动臂12,片状结构另一端作为联动装置被动挡13,联动装置推动臂12与联动装置被动挡13之间设有空隙;
9.被锁定摆臂14为长片状结构,长片状结构一端通过孔固定嵌套到主轴15上,长片状结构另一端设有搭接配位的第一缺口槽;被锁定摆臂14固定在主轴15偏末端的处,主轴15的首端固定嵌套一片装结构的随动臂16;随动臂16上设有一随动臂传递轴17,主轴15与随动臂传递轴17轴两轴平行,且不同轴线,两轴分别位于随动臂16的两侧;主轴15相对固定且可绕自身轴转动;随动臂传递轴17插入到凸缘椭圆孔6中,两者间隙配合;
10.联动臂18的结构为:平板结构1801前端侧面设有向下弯折的翼片1802;翼片1802自由插入到联动装置推动臂12 与联动装置被动挡13之间的孔缝隙中,且翼片1802与联动装置被动挡13之间有一段空隙;平板结构1801上固定一联动轴19,联动轴19相对固定且可绕自身轴转动;
11.联动轴19与主轴15平行,联动轴19一端固定套有一长片状锁定臂20,锁定臂20是通过一端的孔与联动轴19 固定在一起的,锁定臂20的另一端端部设有搭接配位的第二缺口槽,被锁定摆臂14的第一缺口槽与锁定臂20的第二缺口槽两者互补配位或自由分开,两者互配时起到自保护功能作用;联动轴19 的另一端固定有摆臂21;
12.线路板24下表面设有下降位置开关22和升起位置开关23,还复合有主控芯片用于控制电机,下降位置开关22和升起位置开关23与主控芯片连接;平板结构1801后端部上表面翘起和下落时能触碰或离开升起位置开关23,平板结构1801运动时后端部翘起可按压升起位置开关23;主轴15上设有位置开关触碰螺丝46,位置开关触碰螺丝46与下降位置开关22对应匹配,用于主轴15转动时可带动位置开关触碰螺丝46接触按压下降位置开关22;下降位置开关22和升起位置开关23 用于主控芯片对电机发出停止、转动的信号;线路板24上还设有红外发射装置和红外接收装置,用于检测锁体上方是否有车在占位;主控芯片还配合有遥控器接收芯片;
13.锁舌25轴向一端通过弹簧复位,锁舌25轴向另一端自由可伸出主机壳33,锁舌25侧部设有限位凹槽,用于联动装置10被动二次移动时跟着动;联动装置推动臂12插入到上述的限位凹槽中,能够使得联动装置推动臂12推动锁舌25沿锁舌25轴向移动;锁舌25轴向与联动轴19的轴向垂直,与联动装置10长度方向平行;
14.钥匙锁体26上设有锁体转动臂27,锁体转动臂27与摆臂21接触配合,通过转动钥匙锁体26的钥匙可带动锁体转动臂27转动从而带动摆臂21转动进而带动联动轴19绕自身轴转动;
15.动力传递缓冲扭簧28的一端与主轴15的末端同轴固定在一起,动力传递缓冲扭簧28的另一端与挡车臂38一端的左输出轴39固定在一起,挡车臂38的另一端还设有一右输出
轴40,左输出轴39和右输出轴40同轴线且相对,左输出轴39和右输出轴40带动挡车臂38绕左输出轴39和右输出轴40 的同轴线转动即后面所述的升起和放下的过程;
16.弹簧支撑轴31的一端固定在壳体上壳体可以设有中间隔断面即固定到此中间隔断面上,另一端悬空;定位簧30是空心的,弹簧支撑轴31另一端同轴插入定位簧30,定位簧30可以转动,弹簧支撑轴31转不动,
17.定位簧30在靠近弹簧支撑轴31固定端的一端的弹簧丝伸出定位簧30体外作为定位簧搭接端3002并且在挡车臂38 升起到位于垂直位置时抵在底座32上,定位簧30的另一端定位簧固定端3001与挡车臂38的右输出轴40同轴固定连接;定位簧搭接端3002垂直定位簧30的轴;
18.抵消簧29同轴自由套在定位簧30外,抵消簧29靠近定位簧搭接端3002一端的弹簧丝末端与定位簧搭接端3002绕在一起,抵消簧29另一端的弹簧丝末端为一垂直抵消簧29轴的直线段记为抵消簧固定端2901,抵消簧固定端2901伸出抵消簧29体外,并抵在底座32上;
19.定位簧搭接端3002与抵消簧固定端2901分别位于抵消簧29或定位簧30的轴两侧;定位簧搭接端3002与抵消簧固定端2901轮换紧贴底座,当在挡车臂38升起到位于垂直位置时,驱动挡车臂38转动的机械部分全部停止,与此同时,定位簧30的定位簧固定端3001正好抵住底座32,如果有本车位锁以外的外力推动挡车臂38时,由于定位簧30的定位簧固定端3001正好抵住底座32,就会有来自定位簧30的反作用力来弹性阻力阻止挡车臂38动作,当失去外力作用时,挡车臂38受定位簧30的弹力作用自恢复到垂直位置,同时定位簧30也消除了由于凸缘上的凸缘椭圆孔6与随动臂传递轴17的配合间隙产生的挡车臂38松旷动,使挡车臂38始终处于紧实美观的垂直状态;当挡车臂38由升起垂直状态摆向地平位置时,挡车臂右输出轴40带动定位簧连接输出轴端3001使定位簧30逆时针旋转,因定位簧30的定位簧搭接端3001被抵消簧29的抵消簧搭接端2902压挡,抵消簧29的抵消簧固定端2902被底座32挡住,从而抵消挡车臂38重力,减轻电机及传动机构负荷降低电能消耗;
20.底座32位于地面上,减速齿轮箱1、电机3、凸缘,摇臂7、摇臂轴8、推动臂9、联动装置10、被锁定摆臂14、主轴15、随动臂16,随动臂传递轴17、联动臂18、联动轴19、锁定臂20、摆臂21、下降位置开关22、升起位置开关23、线路板24、锁舌25、钥匙锁体26、锁体转动臂27、动力传递缓冲扭簧28、抵消簧29、定位簧30、弹簧支撑轴31、底座32位于底座32上;
21.电机3与减速齿轮箱1连接,驱动减速齿轮箱1内的齿轮体系转动,减速齿轮箱1的减速箱输出轴2与凸缘圆柱传动轴4固定匹配连接;减速齿轮箱1、电机3、凸缘,摇臂7、摇臂轴8、推动臂9、联动装置10、被锁定摆臂14、主轴15、随动臂16,随动臂传递轴17、联动臂18、联动轴19、锁定臂20、摆臂21、下降位置开关22、升起位置开关23、线路板24、锁舌25、钥匙锁体26、锁体转动臂27组成主机,主机外采用主机壳33罩住,主机壳33与底座32固定在一起;主机壳33上还设有左视窗34、右视窗35,左视窗34、右视窗35分别与红外发射装置和红外接收装置上下对位;
22.回位簧47通过螺丝固定在主机壳上,回位簧有两头,一头弹簧丝撑在联动臂18上见图5放大部分,另一头弹簧丝撑在主机壳内表面上;
23.动力传递缓冲扭簧28、主轴15、凸缘圆柱传动轴4、弹簧支撑轴31、定位簧30在同一轴线上,且依次排开。
24.线路板与电源相连,电机与线路板相连,优选电源48采用太阳能电池板,电源48外
采用防压保护罩44罩住,电源48 位于主机壳的侧面,采用锁舌25对电源框架和主机壳成一体或打开;
25.动力传递缓冲扭簧28外设有左侧盖37,抵消簧29、定位簧30、弹簧支撑轴31组成的结构外设有右侧盖36。
26.主控芯片,处理所有信号信息,升起下降位置信号,红外信号,遥控解码,发出电机运转信号,过电流保护,电池电压过低保护,等。
27.左视窗34、右视窗35用于
28.本发上述一种具有监测和保护功能的车位锁的运行过程包括以下几种步骤和方式:
29.1,机械部分:1升起锁止状态变成开锁放下状态过程
30.如图1,图3,图4所示,电路板24接收到使用者手中遥控器发出的放下信号后电机3带动减速箱1使减速箱输出轴2逆时针转动,减速箱输出轴2将动力传递给凸缘圆柱传动轴4,因为凸缘椭圆孔6与随动臂16上面的随动臂传递轴17是通过凸缘椭圆孔6间隙配合,暂时不会带动随动臂传递轴17 转动。只有凸缘凹槽5逆时针旋转,推动摇臂7上面的臂轴输入端轴套7002从凸缘凹槽5的凹槽内出来,使得摇臂7逆时针摆动一个角度,因摇臂7与摇臂轴8固定,使得摇臂轴8 逆时针转动带动推动臂9旋转,推动联动装置推动槽11,使联动装置10移动,联动装置10上面的联动装置推动臂12推动锁定臂18上面的翼片1802,因锁定臂18通过锁定臂18 的平板结构1801固定在联动轴19上,使得联动轴19逆时针转动,又因锁定臂20固定在联动轴19上,从而使锁定臂20 绕联动轴19轴心逆时针摆动,锁定臂20脱离顶住被锁定摆臂14状态此被锁定摆臂14被锁定臂20顶住时,自由度范围只有顺时针方向旋转10
±
2度,臂身就会接触到底座32无法继续动作,逆时针方向如图4被锁定摆臂14被锁定臂20顶死,此时无论挡车臂38受到外界怎样的撞击,主机内的主轴15都能承受并保持锁住状态,自保护功能得以实现。同时锁定臂18的动作使得平板结构1801不再压住升起位置开关23升起位置开关23为主控芯片提供状态信号;然后电机3还在带动减速箱1继续转动,使得凸缘上面的凸缘椭圆孔6触碰到随动臂16 上的随动臂传递轴17,由于凸缘椭圆孔6的带动,使主轴15 逆时针转动,带动动力传递缓冲扭簧28逆时针旋转,动力传递缓冲扭簧28带动挡车臂左输出轴39,使挡车臂38 做放下动作,同时挡车臂右输出轴40带动定位簧连接输出轴端3001使定位簧30逆时针旋转,因定位簧30的定位簧搭接端3001被抵消簧29的抵消簧搭接端2902压挡,抵消簧29 的抵消簧固定端2902被底座32挡住,从而抵消了挡车臂38 重力。当挡车臂38旋转到与底座32平行时,随主轴15同时一起逆时针转动的位置开关触碰螺丝46也正好压住下降位置开关22,下降位置开关22把此时的挡车臂38位置电信号传递给主控芯片使电机3停转。下降完成。
31.2开锁放下状态变成升起锁止状态过程
32.如图1,图3,图4所示所示,电路板24接收到使用者手中遥控器发出的升起信号后,电机3转动,带动减速箱1使减速箱输出轴2顺时针转动,减速箱输出轴2将动力传递给凸缘上的凸缘圆柱传动轴4,凸缘上面的凸缘椭圆孔6通过孔内随动臂传递轴17把转动传递给随动臂16使主轴15顺时针转动带动被锁定摆臂14和动力传递缓冲扭簧28旋转,动力传递缓冲扭簧28带动挡车臂38左输出轴39使挡车臂38 顺时针旋转升起。当挡车臂38升起到垂直位置时,挡车臂38 的右输出轴40也带动定位簧连接输出轴端3001旋转到定位簧30的定位簧
搭接端3002触碰到底座32产生弹簧阻力阻挡定位簧30继续旋转从而阻挡挡车臂38的位置。被锁定摆臂14 也顺时针转动到超过锁定臂20顶死位置。凸缘上面的凸缘凹槽5 正好顺时针旋转到摇臂7上面的臂轴输入端轴套7002入凹槽位置,回位簧47推动联动臂18通过联动轴19使锁定臂20 顶住被锁定摆臂14,同时回位簧47推动联动臂18也通过联动装置推动臂12推动联动装置10上面的联动装置推动槽11,联动装置推动槽11又推动推动臂9使之顺时针转动,推动臂9的转动通过摇臂轴8带动摇臂7上面的臂轴输入端轴套7002落入凸缘上面的凸缘凹槽5内。同时回位簧47推动联动臂18还使联动臂18的平板结构1801顺时针旋转压住了升起位置开关23,升起位置开关23产生电信号送给主控芯片控制电机3停止,升起过程结束。
33.3手动开锁及开防压保护罩44过程
34.一车位锁挡车臂38在垂直锁定位置时如遇故障无法遥控放下挡车臂38时,需手动开锁,具体如下,
35.转动钥匙锁体26上的钥匙,钥匙锁体26的锁体转动臂27 压下摆臂21,摆臂21旋转,通过联动轴23带动锁定臂20 逆时针旋转使被锁定摆臂14变成自由状态,这时直接用手推动挡车臂38到底平这时联动装置10因为与联动臂18预留的配合间隙而未发生任何动作挡车臂38放下动作完成。
36.二如遇修理或清洗电源48部分需要开启防压保护罩44,开启过程如下
37.在步骤一的基础上除去步骤一用手推动挡车臂38 到底平这步继续转动钥匙锁体26上的钥匙,锁体转动臂27 继续下压摆臂21,摆臂21继续旋转,通过联动轴23带动联动臂18继续逆时针旋转,这时联动装置10上面的联动装置被动挡13与联动臂18已无间隙而被带动,继而牵动锁舌25 离开锁孔45回到主机壳内,防压保护罩44可以提起取下。
38.此车位锁主机占用空间小,机壳采用散热功能强的铝制,内部零件采用紧凑设计,用以预留更多的空间安装更大的太阳能电池板接收更多光能产生更多电能。在线路板方面采用一体化设计,把限位开关、红外监测等整合在线路板上。在节能方面采用每隔1-2或3秒利用 940um红外线发射管按12us发射20us停止的频率反复一次,红外光红外接收头接收反射光线并放大后被芯片识别定时检测车辆是否停在车位上,如果车辆在车位上,主控芯片会停止接收遥控器信号主控芯片发出信号,停止遥控器接收芯片工作,从而不能接收到用户手中遥控器发出的信号,既可以降低接收遥控器信号的芯片功耗,又防止误操作使挡车臂升起顶到车辆底盘。
39.在电源方面使用非晶硅太阳能电池板,以适应不同的光照。并且电池板朝向正上方,为车位锁的安装方向提供了便利。在有些因素导致需要手动操作放下挡车臂时,只需将钥匙插入锁孔旋转一档后推下挡车臂,若需立起,不需用钥匙,只需提起挡车臂即可。抗撞击方面可以选择软挡车臂款。防压保护罩45设有调整螺丝49以适应不平地面的安装。
40.与现有技术相比,本实用新型具有如下优势:主机紧凑,占用空间小;手动模式简单;智能感应系统自主切换工作模式,从而延长车位锁的续航时间与使用寿命;不平整地面安装适应能力强;整个锁体圆滑无棱角,主机及从件采用全密封设计,既防压、防水又能很好的保护车胎。
41.为实现以上目的,本实用新型实用新型采用的技术方案如下:
42.提供一种智能感应太阳能车位锁,其结构分为
43.1:主机部分主机壳,内包含控制、红外智能感应、轻触限位开关、遥控信号接收、过电流保护部分线路板,红外发射接收视窗及盖,减速电机部分,动力传递部分,蜂鸣器,锁舌,防水油封及密封圈部分、左侧盖内包括扭簧、两档位锁芯体、开锁开前太阳能板保护盖摇臂、右侧盖内包括用来抵消挡车臂重量的扭簧和挡车臂立起状态时辅助定位的扭簧及此两个弹簧的支撑轴、底座分布有与主机壳及左右侧盖紧固的螺丝孔、地面安装的固定孔
44.2:挡车臂阻挡臂部分包括垫片、半圆卡片、半圆卡片套、卡簧
45.3:太阳能电池板及蓄能电池电源部分包括太阳能电池板及蓄能电池壳体、锂电池、充电平衡及保护线路板、钢化玻璃、太阳能电池板、密封o型圈及输出线束的防水接头
46.4:太阳能电池板保护罩盖部分壳体总成、地面平整度调节螺丝
附图说明:
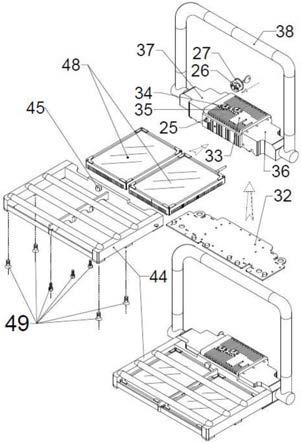
47.图1为车位锁总成轴测图
48.图2为车位锁挡车臂结构轴测图
49.图3为车位锁左右侧盖内部结构图
50.图4为车位锁内部机械传动及部分电器结构图
51.图5为车位锁内部机械传动中部分零件位置明细轴测图
52.图6为车位锁内部机械传动中部分零件分组组装轴测示意图
53.图7为凸缘结构轴测与平面示意图
54.图1中:25,锁舌26,钥匙锁体27,锁体转动臂32,底座33,主机壳34,左视窗35,右视窗36,右侧盖37,左侧盖38,挡车臂 44,防压保护罩45,锁孔48,电源49,调节螺丝
55.图2中:39,左输出轴40,右输出轴41,半圆卡套42,半圆卡 43,垫片
56.图3中:28,动力传递缓冲扭簧29,抵消簧2901,抵消簧固定端2902抵消簧搭接端30,定位簧3001,定位簧连接输出轴端 3002,定位簧搭接端31弹簧支撑轴
57.图4中:1,减速齿轮箱2,减速箱输出轴3,电机4,凸缘圆柱传动轴5,凸缘凹槽6,凸缘椭圆孔7,摇臂8,摇臂轴9,推动臂10,联动装置11,联动装置推动槽12,联动装置推动臂13,联动装置被动挡14,被锁定摆臂15,主轴16,随动臂17,随动臂传递轴18,联动臂19,联动轴20,锁定臂21,摆臂22,下降位置开关23,升起位置开关24,线路板25,锁舌26,钥匙锁体27,锁体转动臂28,动力传递缓冲扭簧46,位置开关触碰螺丝47,回位簧
58.图5中:7,摇臂7001,摇臂轴输入端轴7002,臂轴输入端轴套 18,联动臂1801,平板结构1802,翼片
具体实施方式:
59.以下结合附图对本实用新型作进一步详细说明。但本实用新型并不限于以下实施例。
60.实施例1
61.1,机械部分:1升起锁止状态变成开锁放下状态过程
62.如图1,图3,图4所示,电路板24接收到使用者手中遥控器发出的放下信号后电机3带动减速箱1使减速箱输出轴2逆时针转动,减速箱输出轴2将动力传递给凸缘圆柱传动轴4,因为凸缘椭圆孔6与随动臂16上面的随动臂传递轴17是通过凸缘椭圆孔6间隙配合,暂时
不会带动随动臂传递轴17 转动。只有凸缘凹槽5逆时针旋转,推动摇臂7上面的臂轴输入端轴套7002从凸缘凹槽5的凹槽内出来,使得摇臂7逆时针摆动一个角度,因摇臂7与摇臂轴8固定,使得摇臂轴8 逆时针转动带动推动臂9旋转,推动联动装置推动槽11,使联动装置10移动,联动装置10上面的联动装置推动臂12推动锁定臂18上面的翼片1802,因锁定臂18通过锁定臂18 的平板结构1801固定在联动轴19上,使得联动轴19逆时针转动,又因锁定臂20固定在联动轴19上,从而使锁定臂20 绕联动轴19轴心逆时针摆动,锁定臂20脱离顶住被锁定摆臂14状态此被锁定摆臂14未发生以上所有动作时,自由度范围只有顺时针方向旋转10度+正负2度,臂身就会接触到底座32 无法继续动作,逆时针方向如图4被锁定摆臂14被锁定臂20 顶死。同时锁定臂18的动作使得平板结构1801不再压住升起位置开关23升起位置开关23为主控芯片提供状态信号;在以上动作完成同时,电机3还在带动减速箱1继续转动,使得凸缘上面的凸缘椭圆孔6触碰到随动臂16上的随动臂传递轴17,由于凸缘椭圆孔6的带动,使主轴15逆时针转动,带动动力传递缓冲扭簧28逆时针旋转,动力传递缓冲扭簧28带动挡车臂左输出轴39,使挡车臂38做放下动作,同时挡车臂右输出轴40带动定位簧连接输出轴端3001使定位簧30逆时针旋转,因定位簧30的定位簧搭接端3001被抵消簧29的抵消簧搭接端2902压挡,抵消簧29的抵消簧固定端2902被底座32挡住,从而抵消了挡车臂38重力。当挡车臂38旋转到与底座32平行时,随主轴15同时一起逆时针转动的位置开关触碰螺丝46也正好压住下降位置开关22,下降位置开关22把此时的挡车臂38位置电信号传递给主控芯片使电机3停转。下降完成。
63.2开锁放下状态变成升起锁止状态过程
64.如图1,图3,图4所示所示,电路板24接收到使用者手中遥控器发出的升起信号后,电机3转动,带动减速箱1使减速箱输出轴2顺时针转动,减速箱输出轴2将动力传递给凸缘上的凸缘圆柱传动轴4,凸缘上面的凸缘椭圆孔6通过孔内随动臂传递轴17把转动传递给随动臂16使主轴15顺时针转动带动被锁定摆臂14和动力传递缓冲扭簧28旋转,动力传递缓冲扭簧28带动挡车臂38左输出轴39使挡车臂38 顺时针旋转升起。当挡车臂38升起到垂直位置时,挡车臂38 的右输出轴40也带动定位簧连接输出轴端3001旋转到定位簧30的定位簧搭接端3002触碰到底座32产生弹簧阻力阻挡定位簧30继续旋转从而阻挡挡车臂38的位置。被锁定摆臂14 也顺时针转动到超过锁定臂20顶死位置。凸缘上面的凸缘凹槽5 正好顺时针旋转到摇臂7上面的臂轴输入端轴套7002入凹槽位置,回位簧47推动联动臂18通过联动轴19使锁定臂20 顶住被锁定摆臂14,同时回位簧47推动联动臂18也通过联动装置推动臂12推动联动装置10上面的联动装置推动槽11,联动装置推动槽11又推动推动臂9使之顺时针转动,推动臂9的转动通过摇臂轴8带动摇臂7上面的臂轴输入端轴套7002落入凸缘上面的凸缘凹槽5内。同时回位簧47推动联动臂18还使联动臂18的平板结构1801顺时针旋转压住了升起位置开关23,升起位置开关23产生电信号送给主控芯片控制电机3停止,升起过程结束。
65.4手动开锁及开防压保护罩44过程
66.一车位锁挡车臂38在垂直锁定位置时如遇故障无法遥控放下挡车臂38时,需手动开锁,具体如下,
67.转动钥匙锁体26上的钥匙,钥匙锁体26的锁体转动臂27 压下摆臂21,摆臂21旋转,通过联动轴23带动锁定臂20 逆时针旋转使被锁定摆臂14变成自由状态,这时直接用手
推动挡车臂38到底平这时联动装置10因为与联动臂18预留的配合间隙而未发生任何动作挡车臂38放下动作完成。
68.二如遇修理或清洗电源48部分需要开启防压保护罩44,开启过程如下
69.在步骤一的基础上除去步骤一用手推动挡车臂38 到底平这步继续转动钥匙锁体26上的钥匙,锁体转动臂27 继续下压摆臂21,摆臂21继续旋转,通过联动轴23带动联动臂18继续逆时针旋转,这时联动装置10上面的联动装置被动挡13与联动臂18已无间隙而被带动,继而牵动锁舌25 离开锁孔45回到主机壳内,防压保护罩44可以提起取下。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1