一种智能划线车
1.本实用新型涉及交通道路划线技术领域,具体涉及一种智能划线车。
背景技术:
2.目前,划线机种类较多,以人力驱动为主,且主要通过人的视觉观测,从而操作划线车使其沿基准线喷涂标线,由于操作者的技能水平和视觉疲劳影响容易出现划线车跑偏的现象,造成划线返工,降低工作效率。同时,涂料混合过程中涂料易直接接触操作者,影响人的身体健康。另外,涂料在喷涂过程中雾化不充分,降低了材料的利用率,增加使用成本。
3.我国公路里程基数大,增长速度迅猛,已有路面的维护保养工作任务繁重,路面标志喷绘车在其中起着不可或缺的作用,如何突破传统划线车的弊端,较大程度上解放人、保护人,提高机器的工作质量和效率显得尤其重要。
技术实现要素:
4.本实用新型针对现有的问题,提供了一种智能划线车,可以保护操作者,提高划线工作质量和效率。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种智能划线车,包括:车架,车架下部两侧分别设有一组驱动轮,驱动轮与固定在车架上的步进电机连接,其特征在于:
7.a、一个涂料存储搅拌装置,包括:设置在车架内的涂料箱,涂料箱上安装搅拌器;
8.b、车架上面一侧设置三维进给装置,包括:固定在车架上的x轴直线进给装置,x轴直线进给装置水平方向上正交连接y轴直线进给装置,y轴直线进给装置竖直方向上正交连接z轴直线进给装置;
9.c、车架上面另一侧设置输送喷涂装置,包括:固定在车架上的高压无气喷涂机,高压无气喷涂机一端通过管道与涂料箱连接、另一端通过管道与固定在车架上的气泵连接,在高压无气喷涂机与气泵之间的管道上设置一个气液混合器,气液混合器通过可伸缩的柔性管与喷头换接装置连接。
10.进一步地,所述搅拌器包括搅拌轴,搅拌轴上连接同轴的螺旋形搅拌圈,搅拌轴两端分别连接固定在涂料箱外壁上的轴承座,搅拌轴其中一端穿出轴承座与搅拌电机连接,搅拌电机通过电机支架固定在涂料箱外壁上。
11.进一步地,所述x轴直线进给装置包括第一底座,第一底座与第一传动丝杆两端侧转动连接,第一传动丝杆前端头部与步进电机连接,步进电机固定在第一底座上,第一传动丝杆杆身与设有螺母的第一滑块配合连接,第一滑块通过设有的通孔与一组相平行的第一导向杆滑动配合,第一导向杆固定在第一底座上;
12.所述y轴直线进给装置和z轴直线进给装置与x轴直线进给装置结构相同;第一滑块上固定连接y轴直线进给装置的第二底座,y轴直线进给装置的第二滑块上固定z轴直线进给装置的第三底座;所述第三底座设有可供喷头换接装置穿管的腰孔, z轴直线进给装
置的第三滑块上设有可供喷头换接装置穿管的过管孔。
13.进一步地,所述喷头换接装置,包括:空心轴步进电机,空心轴步进电机安装第三滑块上,空心轴步进电机轴头与喷头换接盘密封连接、轴尾通过连通的气压表与柔性管密封连接,喷头换接盘内设有一组通料孔,通料孔一端通过步进电机的空心轴与柔性管密封连通、另一端与喷头连通,喷头上设有电磁阀。
14.进一步地,所述通料孔数量为3个且以盘中心均匀分布;通料孔与喷头密封连接的结构为细牙螺纹和端面压紧组合密封结构;
15.所述空心轴步进电机的轴头与喷头换接盘密封连接结构为细牙螺纹和台阶面压紧组合密封结构,轴头端部与喷头换接盘形成腔体,所述通料孔与腔体相通。
16.进一步地,所述涂料箱上设置一组加热电阻丝,涂料箱外壁上设有保温隔热外壳。
17.通过上述技术方案,本实用新型具有以下有益效果:
18.1、涂料存储搅拌装置可以实现涂料非接触充分混合,加以热电阻加热辅助,提高混合质量,同时也避免直接接触涂料影响身体健康。
19.2、高压无气喷涂机和气泵通过气液混合阀连接的组合使用,提高了雾化涂料效率且对材料的利用率高,实现无水清洗内部机体功能。
20.3、自动化程度高,解放人力,提高划线工作质量和效率。
附图说明
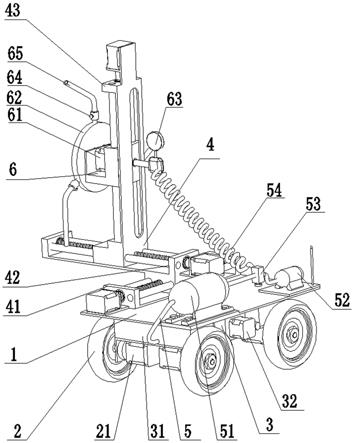
21.图1是本实用新型的结构示意图;
22.图2是输送喷涂装置结构示意图;
23.图3是搅拌器结构示意图;
24.图4是三维进给装置结构示意图;
25.图5是喷头换接装置结构示意图;
26.图6是涂料箱结构示意图;
27.图7是控制系统框图。
具体实施方式
28.为使本实用新型更加清楚明白,下面结合附图对本实用新型的一种智能划线车进一步说明,此处所描述的具体实施例仅用于解释本实用新型,并不用于限定本实用新型。
29.如图1至图6所示,一种智能划线车,包括一下几个部分:
30.一个车架1,车架1下部设有4个驱动轮2,均布在车架两侧。驱动轮2与步进电机21直连,电机21固定在车架上。
31.一个涂料存储搅拌装置3,包括:设置在车架内部的涂料箱31,涂料箱上安装搅拌器32。搅拌器32包括搅拌轴322,搅拌轴322上焊接同轴的螺旋形搅拌圈325,搅拌圈325由圆钢螺旋弯制而成。搅拌轴322两端分别连接固定在涂料箱31外壁上的轴承座323,搅拌轴322其中一端穿出轴承座323与搅拌电机321连接,搅拌电机321固定在电机支架324上,支架324为“几”字型支架,通过螺栓固定在涂料箱31的外壁上。所述涂料箱31上设置一组加热电阻丝311,涂料箱外壁上设有保温隔热外壳312。
32.车架上面一侧设置一个三轴相互垂直运动的三维进给装置4,包括:固定在车架上
的x轴直线进给装置41,x轴直线进给装置41水平方向上正交连接y轴直线进给装置42,y轴直线进给装置42竖直方向上正交连接z轴直线进给装置43。
33.所述x轴直线进给装置41包括第一底座411,第一底座411由钢板焊合而成,其两端安装滚动轴承415,两个滚动轴承415同轴,第一传动丝杆412两端分别与滚动轴承145配合安装。第一传动丝杆412前端头部穿过一侧的滚动轴承145与步进电机416直连,步进电机安装在t型的电机安装座417上,电机安装座417固定在第一底座411上。第一传动丝杆412杆身与设有螺母的第一滑块413丝杠滚珠配合连接,可减少摩擦阻力。第一滑块413通过设有的配合孔418与2个相互平行的第一导向杆414滑动配合,配合孔418为圆柱通孔,第一导向杆414两端通过轴孔过盈配合固定在第一底座411上。第一导向杆414也与第一传动丝杆412平行。x轴直线进给装置41将步进电机416的旋转运动转化为第一滑块413沿着第一导向杆414的直线运动。
34.所述y轴直线进给装置42、z轴直线进给装置43与x轴直线进给装置41结构相同;第一滑块413上焊接固定连接y轴直线进给装置42的第二底座421上,y轴直线进给装置42的第二滑块423上焊接固定z轴直线进给装置43的第三底座431上;所述第三底座431设有可供喷头换接装置6穿管的腰孔430, z轴直线进给装置43的第三滑块433上设有可供喷头换接装置6穿管的过管孔435。
35.车架上面另一侧设置输送喷涂装置5,包括:螺栓固定在车架上的高压无气喷涂机51,高压无气喷涂机51一端通过管道与涂料箱31连接、另一端通过管道与气泵52连接,气泵52螺接在车架上。在高压无气喷涂机51与气泵52之间的管道上设置一个气液混合器53,气液混合器53通过可伸缩的柔性管54与喷头换接装置6连接,所述气液混合器53和柔性管54均为公知技术。
36.所述喷头换接装置6,包括:空心轴步进电机61,空心轴步进电机61通过支架安装第三滑块433上。空心轴步进电机61轴头与喷头换接盘62密封连接,轴尾穿过过管孔435,通过连通的气压表63与柔性管54密封连接。喷头换接盘62内设有一组通料孔621,通料孔621数量为3个且以盘中心均匀分布,其一端通过步进电机的空心轴与柔性管54密封连通、另一端与喷头65连通,喷头65上设有电磁阀64,电磁阀64控制喷头65与外界通断。
37.其中,通料孔621前端设有带内台阶的细牙螺纹孔,内台阶上安装第一密封垫622,通过细牙螺纹配合使喷头65配合端面压在第一密封垫622垫上形成密封配;空心轴步进电机61的轴头与喷头换接盘62配合部设有细牙螺纹,步进电机61的轴头侧设有外台阶623,外台阶623上安装第二密封垫624,通过细牙螺纹配合使第二密封垫624压紧喷头换接盘62上,轴头端部距喷头换接盘62配合孔底有一段距离,形成腔体625,通料孔621与腔体625相通。
38.如图7所示,控制系统包括:4个超声波传感器、含有程序的单片机、红外遥控装置和显示模块;单片机控制分别控制搅拌电机33、三维进给装置步进电机、驱动轮步进电机21、空心轴步进电机61、气泵52、电磁阀64和加热电阻丝311,其中,上述步进电机自带检测反馈装置,超声波传感器和红外遥控装置向单片机反馈信号,显示模块与单片机信号相互传输,整车由充电锂电池(图中未标示)供电。
39.工作流程:
40.用四台步进电机21驱动整车运行,划线车两侧的超声波传感器来保证整车按所需路径运行。搅拌电机33带动搅拌器32旋转,实现对原料的均匀搅拌,防止沉淀凝固等问题,
同时涂料箱31上设有加热电阻丝311,其外壳312具有保温隔热之效。混合完毕,启动工作按钮,在显示模块面板上按下回参考点按钮,控制三维进给装置的xyz三方向步进电机启动,通过丝杠将电机的旋转运动转化成滑块的往复直线运动,并可以将滑块停放在参考点处。
41.事先根据路面标志需求情况,合理编写程序,并通过显示模块面板输入控制系统中,并通过系统进行仿真模拟校验。
42.通过程序使智能划线车的超声波传感器进行路面路肩的定位,若存在有反馈信号,则进一步完成定位;系统默认,在30s内未接受到反馈信号,由自动喷绘模式切换到人工遥控模式,此时程序控制仅起辅助作用,通过人工遥控完成喷绘任务。
43.在反馈信号成立的前提下和定位完全的基础上,无气喷涂机51和气泵52启动,通过管道使涂料进入喷头换接盘62内,此时涂料不会被喷出,当被选择喷头65就位,同时控制该喷头的电磁阀64开启,雾化的涂料才得以喷绘在工作面上,在驱动轮2和三维进给装置4的联动下,可以得到预期的喷绘效果。
44.在自动喷绘模式下,喷绘结果通过进给装置4中步进电机自带的检测装置(半闭环系统的检测)反馈,与超声波定位信号进行比较,实时调整机体运行轨迹。
45.喷涂任务完成后,该循环工作流程结束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1