一种路面缺陷修补机器人
1.本实用新型涉及机器人技术领域,具体涉及一种路面缺陷修补机器人。
背景技术:
2.随着社会的不断发展,各行各业的分工越来越明确,尤其是在现代化的大产业中,人们强烈希望用某种机械代替自己的工作,因此人们研究出各种特种作业机器人,用以代替人去完成那些繁琐而又危险的工作。
3.公共设施的维护,现在大多数都是人工维护,需要服务对象反馈相应的问题给相关单位才能得到处理,有些公共设施如果没及时的去修复,可能导致严重的后果。
4.例如:城市路面的缺陷很多,如人行道上的砖块松脱、盲道部分砖块的缺失或者损坏、人行道上的障碍物等,这些问题是需要及时处理的,这样才能有效减少公共设施安全问题的隐患。
技术实现要素:
5.本实用新型的目的在于提供一种路面缺陷修补机器人,能修复人行道和盲道上的路面砖的缺陷,以解决背景技术中提到的技术问题。
6.本实用新型的目的是通过以下技术方案来实现的:
7.一种路面缺陷修补机器人,包括车体、行走履带、橡胶履带轮、水泥搅拌箱、水泥储料箱、机械手和铲子,所述行走履带和所述橡胶履带轮的数量均为2个,2个所述行走履带对称设置在所述车体车身的两侧,2个所述橡胶履带轮对称设置在所述车体的头部两侧,所述机械手、水泥搅拌箱及所述水泥储料箱安装在车体上且沿所述车体的长度方向依次设置,所述铲子安装在所述车体的头部的前壁上,所述车体的头部的前壁上还安装有水泥出料管,所述水泥出料管与所述水泥搅拌箱连通。
8.进一步地,所述橡胶履带轮包括第一履带轮、第二履带轮、第三履带轮、挡盖、履带本体、安装座,所述第一履带轮、第二履带轮和所述第三履带轮呈三角形安装在所述挡盖上,所述挡盖为三角形档块,所述挡盖的中心安装有主动齿轮,所述第三履带轮包括从动齿轮和2个从动履带轮,2个所述从动履带轮安装在所述从动齿轮的两侧,且所述主动齿轮和从动履带轮之间通过传动皮带连接;
9.所述安装座内安装有驱动电机,所述主动齿轮上安装有驱动轴,所述驱动轴与所述驱动电机的输出轴连接;
10.所述履带本体套设在所述第一履带轮、第二履带轮及所述第三履带轮上。
11.进一步地,所述水泥搅拌箱包括搅拌筒、搅拌主叶轮、多个搅拌从动叶轮、套盖和端盖,所述搅拌主叶轮安装在所述套盖上,多个所述搅拌从动叶轮通过定位安装盘与所述搅拌主叶轮连接组成搅拌单元,所述搅拌单元安装在所述搅拌筒内,所述端盖安装在所述搅拌筒的顶端。
12.进一步地,所述套盖上设有行星主动轮,所述搅拌从动叶轮上设有套筒,所述套筒
套接有第一行星从动轮,所述搅拌主叶轮上设有第二行星从动轮,所述第一行星从动轮和所述第二行星从动轮均与所述行星主动轮啮合。
13.进一步地,所述机械手包括机械臂和抓具,所述机械臂的第一端安装在所述车体上,所述机械臂的第二端连接所述抓具。
14.进一步地,所述机械臂包括第一连接臂和第二连接臂,所述第一连接臂的第一端与所述车体铰接,所述第一连接臂的第二端与所述第二连接臂的第一端铰接,所述第二连接臂的第一端连接所述抓具。
15.进一步地,所述第二连接臂上安装有运动轴,所述抓具包括支撑盘、若干个抓手、连接轴、标记盘和驱动气缸,若干个所述抓手均匀安装在所述支撑盘上,所述连接轴的第一端与所述支撑盘连接,所述连接轴的第二端与所述运动轴连接,所述驱动气缸通过连接座安装在所述连接轴上,所述标记盘安装在所述支撑盘上面向地面的底壁上。
16.进一步地,所述车体上安装有摄像头。
17.本实用新型的有益效果是:
18.本实用新型的路面缺陷修补机器人,工作时,车体可通过行走履带和橡胶履带轮进行移动,通过摄像头的图像识别及声波传感器等现有技术的结合来避开障碍物,在人行道上工作时,可通过摄像头的图像识别定位人行道上松脱的路面砖,然后将机械臂移动到需要修补的位置,通过机械臂上的抓具把需要处理的路面砖抓起放在一边,同时通过水泥储料箱给水泥搅拌箱供料,水泥搅拌箱搅拌后的水泥通过水泥出料管输出到需要填补的地方,机械臂把刚刚抓起的路面砖放回铺有水泥的原位置,并通过机械臂的红叉标记该块路面砖,最后通过自身重力把处理后的路面砖来回压几次,完成路面修补,橡胶履带轮可提高该机器人的运行平稳性。
附图说明
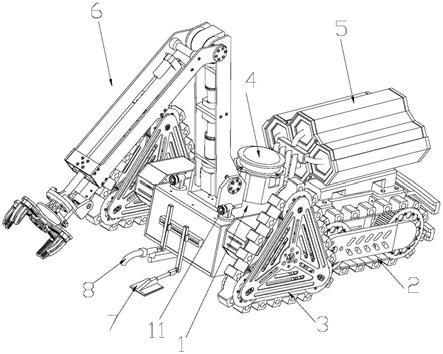
19.图1为本实用新型路面缺陷修补机器人的整体结构示意图;
20.图2为实用新型橡胶履带轮的结构示意图;
21.图3为实用新型水泥搅拌箱的结构示意图;
22.图4为实用新型机械臂的结构示意图;
23.图5为实用新型抓具的结构示意图;
24.图中,1
‑
车体,2
‑
行走履带,3
‑
橡胶履带轮,301
‑
第一履带轮,302
‑
第二履带轮,303
‑
第三履带轮,304
‑
挡盖,305
‑
履带本体,306
‑
安装座,307
‑
主动齿轮,308
‑
从动齿轮,309
‑
从动履带轮,310
‑
传动皮带,4
‑
水泥搅拌箱,401
‑
搅拌筒,402
‑
搅拌主叶轮,403
‑
搅拌从动叶轮,404
‑
套盖,405
‑
端盖,406
‑
定位安装盘,407
‑
行星主动轮,408
‑
套筒,409
‑
第一行星从动轮,410
‑
第二行星从动轮,5
‑
水泥储料箱,6
‑
机械手,7
‑
铲子,8
‑
水泥出料管,9
‑
机械臂,901
‑
第一连接臂,902
‑
第二连接臂,903
‑
运动轴,10
‑
抓具,1001
‑
支撑盘,1002
‑
抓手,1003
‑
连接轴,1004
‑
标记盘,1005
‑
驱动气缸,1006
‑
连接座,11
‑
摄像头。
具体实施方式
25.下面将结合实施例,对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的
实施例,本领域技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.实施例1
27.参阅图1
‑
5,本实用新型提供一种技术方案:
28.请参照图1,一种路面缺陷修补机器人,包括车体1、行走履带2、橡胶履带轮3、水泥搅拌箱4、水泥储料箱5、机械手6和铲子7,所述行走履带2和所述橡胶履带轮3的数量均为2个,2个所述行走履带2对称设置在所述车体1车身的两侧,2个所述橡胶履带轮3对称设置在所述车体1的头部两侧,所述机械手6、水泥搅拌箱4及所述水泥储料箱5安装在车体1上且沿所述车体1的长度方向依次设置,所述铲子7安装在所述车体1的头部的前壁上,所述车体1的头部的前壁上还安装有水泥出料管8,所述水泥出料管8与所述水泥搅拌箱4连通。所述车体1上还可安装有摄像头11。
29.本实用新型的路面缺陷修补机器人,工作时,车体1可通过行走履带2和橡胶履带轮3进行移动,通过摄像头11的图像识别及声波传感器等现有技术的结合来避开障碍物,在人行道上工作时,可通过摄像头11的图像识别定位人行道上松脱的路面砖,然后将机械臂9移动到需要修补的位置,通过机械臂9上的抓具10把需要处理的路面砖抓起放在一边,同时通过水泥储料箱5给水泥搅拌箱4供料,水泥搅拌箱4搅拌后的水泥通过水泥出料管8输出到需要填补的地方,机械臂9把刚刚抓起的路面砖放回铺有水泥的原位置,最后通过自身重力把处理后的路面砖来回压几次,完成路面修补,橡胶履带轮3可提高该机器人的运行平稳性。
30.请参照图2,所述橡胶履带轮3包括第一履带轮301、第二履带轮302、第三履带轮303、挡盖304、履带本体305、安装座306,所述第一履带轮301、第二履带轮302和所述第三履带轮303呈三角形安装在所述挡盖304上,所述挡盖304为三角形档块,所述挡盖304的中心安装有主动齿轮307,所述第三履带轮303包括从动齿轮308和2个从动履带轮309,2个所述从动履带轮309安装在所述从动齿轮308的两侧,且所述主动齿轮307和从动履带轮309之间通过传动皮带310连接;
31.所述安装座306内安装有驱动电机,所述主动齿轮307上安装有驱动轴,所述驱动轴与所述驱动电机的输出轴连接;
32.所述履带本体305套设在所述第一履带轮301、第二履带轮302及所述第三履带轮303上。
33.本实用新型的橡胶履带轮3的驱动电机启动时,带动主动齿轮307转动,主动齿轮307转动带动第三履带轮303中的从动齿轮308转动,与从动齿轮308啮合的2个从动履带轮309转动,带动第一履带轮301和第二履带轮302一起转动,从而可以驱动车体1前进或后退,车体1前进或后退,可使得路面待修补的砖在车体1自身重力作用来回碾压贴紧地面,还可提高该机器人的运行平稳性。
34.请参照图3,所述水泥搅拌箱4包括搅拌筒401、搅拌主叶轮402、多个搅拌从动叶轮403、套盖404和端盖405,所述搅拌主叶轮402安装在所述套盖404上,多个所述搅拌从动叶轮403通过定位安装盘406与所述搅拌主叶轮402连接组成搅拌单元,所述搅拌单元安装在所述搅拌筒401内,所述端盖405安装在所述搅拌筒401的顶端。
35.请参照图3,所述套盖404上设有行星主动轮407,所述搅拌从动叶轮403上设有套
筒408,所述套筒408套接有第一行星从动轮409,所述搅拌主叶轮402上设有第二行星从动轮410,所述第一行星从动轮409和所述第二行星从动轮410均与所述行星主动轮407啮合。
36.本实用新型通过行星主动轮407的转动,带动第一行星从动轮409和所述第二行星从动轮410转动,从而使得搅拌主叶轮402和多个搅拌从动叶轮403同步转动,对水泥进行搅拌,从而实现水泥原材料在水泥的均匀混合。
37.请参照图4
‑
5,所述机械手6包括机械臂9和抓具10,所述机械臂9的第一端安装在所述车体1上,所述机械臂9的第二端连接所述抓具10。
38.本实用新型的机械手6由机械臂9和抓具10组成,机械臂9用于将抓具10移动到工作位,抓具10用于抓取砖块。
39.请参照图4
‑
5,所述机械臂9包括第一连接臂901和第二连接臂902,所述第一连接臂901的第一端与所述车体1铰接,所述第一连接臂901的第二端与所述第二连接臂902的第一端铰接,所述第二连接臂902的第一端连接所述抓具10。
40.本实用新型机械臂9的第一连接臂901铰接在车体1上,第二连接臂902第一端连接抓具10,通过第一连接臂901和第二连接臂902的联动实现抓具10的移动。
41.请参照图4
‑
5,所述第二连接臂902上安装有运动轴903,所述抓具10包括支撑盘1001、若干个抓手1002、连接轴1003、标记盘1004和驱动气缸1005,若干个所述抓手1002均匀安装在所述支撑盘1001上,所述连接轴1003的第一端与所述支撑盘1001连接,所述连接轴1003的第二端与所述运动轴903连接,所述驱动气缸1005通过连接座1006安装在所述连接轴1003上,所述标记盘1004安装在所述支撑盘1001上面向地面的底壁上。
42.本实用新型抓具10上的支撑盘1001上设有多个均匀分布的抓手1002,其标记盘1004可以标记修补的路面砖,所述连接轴1003为伸缩轴,驱动气缸1005启动是可以驱动抓具10在轴向移动,抓手1002之间的距离的调节通过设置其现有技术的相关内部结构来实现,通过在支撑盘1001上设有电机、锥形齿轮、盖体、单导向螺杆、支撑定位配件等部件,电机转动,带动锥形齿轮一起运动,锥形齿轮上面有与挡盖、单导向螺杆上的齿轮啮合,锥形齿轮运动时,盖体与单导向螺杆也会随之产生转动,单导向螺杆与盖体通过自生的螺纹与支撑定位配件,把转动运动转换成支撑定位配件的线性运动,这样就实现了抓手1002的往返运动,从而可更具工作需要调整加紧指间的距离,实现对砖块的抓紧及取放。
43.以上所述仅是本实用新型的优选实施方式,应当理解本实用新型并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则都应在本实用新型所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1